diff --git a/CODEOWNERS b/CODEOWNERS
index 9dd84ad290b..dcb769487b1 100644
--- a/CODEOWNERS
+++ b/CODEOWNERS
@@ -1,6 +1,7 @@
* @tensorflow/tf-garden-team @tensorflow/tf-model-garden-team
/official/ @rachellj218 @saberkun @jaeyounkim
/official/nlp/ @saberkun @lehougoogle @rachellj218 @jaeyounkim
+/official/recommendation/ranking/ @gagika
/official/vision/ @xianzhidu @yeqingli @arashwan @saberkun @rachellj218 @jaeyounkim
/official/vision/beta/projects/assemblenet/ @mryoo
/official/vision/beta/projects/deepmac_maskrcnn/ @vighneshbirodkar
diff --git a/official/__init__.py b/official/__init__.py
index e69de29bb2d..e419af524b5 100644
--- a/official/__init__.py
+++ b/official/__init__.py
@@ -0,0 +1,14 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
diff --git a/official/core/base_task.py b/official/core/base_task.py
index 3ef5d0d5984..598c7235859 100644
--- a/official/core/base_task.py
+++ b/official/core/base_task.py
@@ -38,7 +38,10 @@ class Task(tf.Module, metaclass=abc.ABCMeta):
# Special keys in train/validate step returned logs.
loss = "loss"
- def __init__(self, params, logging_dir: str = None, name: str = None):
+ def __init__(self,
+ params,
+ logging_dir: Optional[str] = None,
+ name: Optional[str] = None):
"""Task initialization.
Args:
@@ -294,11 +297,38 @@ def inference_step(self, inputs, model: tf.keras.Model):
return model(inputs, training=False)
def aggregate_logs(self, state, step_logs):
- """Optional aggregation over logs returned from a validation step."""
+ """Optional aggregation over logs returned from a validation step.
+
+ Given step_logs from a validation step, this function aggregates the logs
+ after each eval_step() (see eval_reduce() function in
+ official/core/base_trainer.py). It runs on CPU and can be used to aggregate
+ metrics during validation, when there are too many metrics that cannot fit
+ into TPU memory. Note that this may increase latency due to data transfer
+ between TPU and CPU. Also, the step output from a validation step may be a
+ tuple with elements from replicas, and a concatenation of the elements is
+ needed in such case.
+
+ Args:
+ state: The current state of training, for example, it can be a sequence of
+ metrics.
+ step_logs: Logs from a validation step. Can be a dictionary.
+ """
pass
def reduce_aggregated_logs(self,
aggregated_logs,
global_step: Optional[tf.Tensor] = None):
- """Optional reduce of aggregated logs over validation steps."""
+ """Optional reduce of aggregated logs over validation steps.
+
+ This function reduces aggregated logs at the end of validation, and can be
+ used to compute the final metrics. It runs on CPU and in each eval_end() in
+ base trainer (see eval_end() function in official/core/base_trainer.py).
+
+ Args:
+ aggregated_logs: Aggregated logs over multiple validation steps.
+ global_step: An optional variable of global step.
+
+ Returns:
+ A dictionary of reduced results.
+ """
return {}
diff --git a/official/core/base_trainer.py b/official/core/base_trainer.py
index 61c74c5b65d..30340b4bbb0 100644
--- a/official/core/base_trainer.py
+++ b/official/core/base_trainer.py
@@ -246,10 +246,11 @@ def __init__(
self._train_loss = tf.keras.metrics.Mean("training_loss", dtype=tf.float32)
self._validation_loss = tf.keras.metrics.Mean(
"validation_loss", dtype=tf.float32)
+ model_metrics = model.metrics if hasattr(model, "metrics") else []
self._train_metrics = self.task.build_metrics(
- training=True) + self.model.metrics
+ training=True) + model_metrics
self._validation_metrics = self.task.build_metrics(
- training=False) + self.model.metrics
+ training=False) + model_metrics
self.init_async()
diff --git a/official/modeling/activations/sigmoid.py b/official/modeling/activations/sigmoid.py
index e815f7ee8c5..277463040e7 100644
--- a/official/modeling/activations/sigmoid.py
+++ b/official/modeling/activations/sigmoid.py
@@ -28,4 +28,4 @@ def hard_sigmoid(features):
The activation value.
"""
features = tf.convert_to_tensor(features)
- return tf.nn.relu6(features + tf.constant(3.)) * 0.16667
+ return tf.nn.relu6(features + tf.cast(3., features.dtype)) * 0.16667
diff --git a/official/modeling/activations/swish.py b/official/modeling/activations/swish.py
index 7fcac2b2bff..ea79985e300 100644
--- a/official/modeling/activations/swish.py
+++ b/official/modeling/activations/swish.py
@@ -52,7 +52,8 @@ def hard_swish(features):
The activation value.
"""
features = tf.convert_to_tensor(features)
- return features * tf.nn.relu6(features + tf.constant(3.)) * (1. / 6.)
+ fdtype = features.dtype
+ return features * tf.nn.relu6(features + tf.cast(3., fdtype)) * (1. / 6.)
@tf.keras.utils.register_keras_serializable(package='Text')
diff --git a/official/modeling/optimization/configs/optimization_config.py b/official/modeling/optimization/configs/optimization_config.py
index 4b6e400b61e..49a4db624d9 100644
--- a/official/modeling/optimization/configs/optimization_config.py
+++ b/official/modeling/optimization/configs/optimization_config.py
@@ -41,6 +41,7 @@ class OptimizerConfig(oneof.OneOfConfig):
rmsprop: rmsprop optimizer.
lars: lars optimizer.
adagrad: adagrad optimizer.
+ slide: slide optimizer.
"""
type: Optional[str] = None
sgd: opt_cfg.SGDConfig = opt_cfg.SGDConfig()
@@ -50,6 +51,7 @@ class OptimizerConfig(oneof.OneOfConfig):
rmsprop: opt_cfg.RMSPropConfig = opt_cfg.RMSPropConfig()
lars: opt_cfg.LARSConfig = opt_cfg.LARSConfig()
adagrad: opt_cfg.AdagradConfig = opt_cfg.AdagradConfig()
+ slide: opt_cfg.SLIDEConfig = opt_cfg.SLIDEConfig()
@dataclasses.dataclass
diff --git a/official/modeling/optimization/configs/optimizer_config.py b/official/modeling/optimization/configs/optimizer_config.py
index 7b4de948248..1d9570e21a5 100644
--- a/official/modeling/optimization/configs/optimizer_config.py
+++ b/official/modeling/optimization/configs/optimizer_config.py
@@ -226,3 +226,24 @@ class LARSConfig(BaseOptimizerConfig):
classic_momentum: bool = True
exclude_from_weight_decay: Optional[List[str]] = None
exclude_from_layer_adaptation: Optional[List[str]] = None
+
+
+@dataclasses.dataclass
+class SLIDEConfig(BaseOptimizerConfig):
+ """Configuration for SLIDE optimizer.
+
+ Details coming soon.
+ """
+ name: str = "SLIDE"
+ beta_1: float = 0.9
+ beta_2: float = 0.999
+ epsilon: float = 1e-6
+ weight_decay_rate: float = 0.0
+ weight_decay_type: str = "inner"
+ exclude_from_weight_decay: Optional[List[str]] = None
+ exclude_from_layer_adaptation: Optional[List[str]] = None
+ include_in_sparse_layer_adaptation: Optional[List[str]] = None
+ sparse_layer_learning_rate: float = 0.1
+ do_gradient_rescaling: bool = True
+ norm_type: str = "layer"
+ ratio_clip_norm: float = 1e5
diff --git a/official/modeling/optimization/ema_optimizer.py b/official/modeling/optimization/ema_optimizer.py
index 3bf3c3607df..c4f44d7124d 100644
--- a/official/modeling/optimization/ema_optimizer.py
+++ b/official/modeling/optimization/ema_optimizer.py
@@ -14,7 +14,7 @@
"""Exponential moving average optimizer."""
-from typing import Text, List
+from typing import List, Optional, Text
import tensorflow as tf
@@ -106,7 +106,7 @@ def has_shadow_copy(self):
def _create_slots(self, var_list):
self._optimizer._create_slots(var_list=var_list) # pylint: disable=protected-access
- def apply_gradients(self, grads_and_vars, name: Text = None):
+ def apply_gradients(self, grads_and_vars, name: Optional[Text] = None):
result = self._optimizer.apply_gradients(grads_and_vars, name)
self.update_average(self.iterations)
return result
diff --git a/official/modeling/optimization/optimizer_factory.py b/official/modeling/optimization/optimizer_factory.py
index c5080989642..c41d98fb607 100644
--- a/official/modeling/optimization/optimizer_factory.py
+++ b/official/modeling/optimization/optimizer_factory.py
@@ -13,12 +13,13 @@
# limitations under the License.
"""Optimizer factory class."""
-from typing import Callable, Union
+from typing import Callable, Optional, Union
import gin
import tensorflow as tf
import tensorflow_addons.optimizers as tfa_optimizers
+from official.modeling.optimization import slide_optimizer
from official.modeling.optimization import ema_optimizer
from official.modeling.optimization import lars_optimizer
from official.modeling.optimization import lr_schedule
@@ -33,6 +34,7 @@
'rmsprop': tf.keras.optimizers.RMSprop,
'lars': lars_optimizer.LARS,
'adagrad': tf.keras.optimizers.Adagrad,
+ 'slide': slide_optimizer.SLIDE
}
LR_CLS = {
@@ -134,8 +136,8 @@ def build_learning_rate(self):
def build_optimizer(
self,
lr: Union[tf.keras.optimizers.schedules.LearningRateSchedule, float],
- postprocessor: Callable[[tf.keras.optimizers.Optimizer],
- tf.keras.optimizers.Optimizer] = None):
+ postprocessor: Optional[Callable[[tf.keras.optimizers.Optimizer],
+ tf.keras.optimizers.Optimizer]] = None):
"""Build optimizer.
Builds optimizer from config. It takes learning rate as input, and builds
diff --git a/official/modeling/optimization/slide_optimizer.py b/official/modeling/optimization/slide_optimizer.py
new file mode 100644
index 00000000000..c1975a3111e
--- /dev/null
+++ b/official/modeling/optimization/slide_optimizer.py
@@ -0,0 +1,20 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+"""SLIDE optimizer.
+
+A new optimizer that will be open sourced soon.
+"""
+
+SLIDE = "Unimplemented"
diff --git a/official/modeling/progressive/trainer.py b/official/modeling/progressive/trainer.py
index c3bebbdfeb5..caf8e27c5cc 100644
--- a/official/modeling/progressive/trainer.py
+++ b/official/modeling/progressive/trainer.py
@@ -284,8 +284,11 @@ def _maybe_export_non_progressive_checkpoint(self, export_ckpt_dir):
checkpoint_interval=checkpoint_interval,
)
+ # Make sure we export the last checkpoint.
+ last_checkpoint = (
+ self.global_step.numpy() == self._config.trainer.train_steps)
checkpoint_path = self._export_ckpt_manager.save(
checkpoint_number=self.global_step.numpy(),
- check_interval=True)
+ check_interval=not last_checkpoint)
if checkpoint_path:
logging.info('Checkpoints exported: %s.', checkpoint_path)
diff --git a/official/nlp/data/classifier_data_lib.py b/official/nlp/data/classifier_data_lib.py
index 2498c327094..e2b46aa043b 100644
--- a/official/nlp/data/classifier_data_lib.py
+++ b/official/nlp/data/classifier_data_lib.py
@@ -181,20 +181,21 @@ def _create_examples(self, lines, set_type):
class ColaProcessor(DataProcessor):
"""Processor for the CoLA data set (GLUE version)."""
+ def __init__(self, process_text_fn=tokenization.convert_to_unicode):
+ super(ColaProcessor, self).__init__(process_text_fn)
+ self.dataset = tfds.load("glue/cola", try_gcs=True)
+
def get_train_examples(self, data_dir):
"""See base class."""
- return self._create_examples(
- self._read_tsv(os.path.join(data_dir, "train.tsv")), "train")
+ return self._create_examples_tfds("train")
def get_dev_examples(self, data_dir):
"""See base class."""
- return self._create_examples(
- self._read_tsv(os.path.join(data_dir, "dev.tsv")), "dev")
+ return self._create_examples_tfds("validation")
def get_test_examples(self, data_dir):
"""See base class."""
- return self._create_examples(
- self._read_tsv(os.path.join(data_dir, "test.tsv")), "test")
+ return self._create_examples_tfds("test")
def get_labels(self):
"""See base class."""
@@ -205,22 +206,19 @@ def get_processor_name():
"""See base class."""
return "COLA"
- def _create_examples(self, lines, set_type):
+ def _create_examples_tfds(self, set_type):
"""Creates examples for the training/dev/test sets."""
+ dataset = self.dataset[set_type].as_numpy_iterator()
examples = []
- for i, line in enumerate(lines):
- # Only the test set has a header.
- if set_type == "test" and i == 0:
- continue
+ for i, example in enumerate(dataset):
guid = "%s-%s" % (set_type, i)
- if set_type == "test":
- text_a = self.process_text_fn(line[1])
- label = "0"
- else:
- text_a = self.process_text_fn(line[3])
- label = self.process_text_fn(line[1])
+ label = "0"
+ text_a = self.process_text_fn(example["sentence"])
+ if set_type != "test":
+ label = str(example["label"])
examples.append(
- InputExample(guid=guid, text_a=text_a, text_b=None, label=label))
+ InputExample(
+ guid=guid, text_a=text_a, text_b=None, label=label, weight=None))
return examples
diff --git a/official/nlp/data/sentence_prediction_dataloader.py b/official/nlp/data/sentence_prediction_dataloader.py
index 766595bfe84..3d7c38d765e 100644
--- a/official/nlp/data/sentence_prediction_dataloader.py
+++ b/official/nlp/data/sentence_prediction_dataloader.py
@@ -14,7 +14,7 @@
"""Loads dataset for the sentence prediction (classification) task."""
import functools
-from typing import List, Mapping, Optional
+from typing import List, Mapping, Optional, Tuple
import dataclasses
import tensorflow as tf
@@ -40,6 +40,10 @@ class SentencePredictionDataConfig(cfg.DataConfig):
label_type: str = 'int'
# Whether to include the example id number.
include_example_id: bool = False
+ label_field: str = 'label_ids'
+ # Maps the key in TfExample to feature name.
+ # E.g 'label_ids' to 'next_sentence_labels'
+ label_name: Optional[Tuple[str, str]] = None
@data_loader_factory.register_data_loader_cls(SentencePredictionDataConfig)
@@ -50,6 +54,11 @@ def __init__(self, params):
self._params = params
self._seq_length = params.seq_length
self._include_example_id = params.include_example_id
+ self._label_field = params.label_field
+ if params.label_name:
+ self._label_name_mapping = dict([params.label_name])
+ else:
+ self._label_name_mapping = dict()
def _decode(self, record: tf.Tensor):
"""Decodes a serialized tf.Example."""
@@ -58,7 +67,7 @@ def _decode(self, record: tf.Tensor):
'input_ids': tf.io.FixedLenFeature([self._seq_length], tf.int64),
'input_mask': tf.io.FixedLenFeature([self._seq_length], tf.int64),
'segment_ids': tf.io.FixedLenFeature([self._seq_length], tf.int64),
- 'label_ids': tf.io.FixedLenFeature([], label_type),
+ self._label_field: tf.io.FixedLenFeature([], label_type),
}
if self._include_example_id:
name_to_features['example_id'] = tf.io.FixedLenFeature([], tf.int64)
@@ -85,8 +94,12 @@ def _parse(self, record: Mapping[str, tf.Tensor]):
if self._include_example_id:
x['example_id'] = record['example_id']
- y = record['label_ids']
- return (x, y)
+ x[self._label_field] = record[self._label_field]
+
+ if self._label_field in self._label_name_mapping:
+ x[self._label_name_mapping[self._label_field]] = record[self._label_field]
+
+ return x
def load(self, input_context: Optional[tf.distribute.InputContext] = None):
"""Returns a tf.dataset.Dataset."""
@@ -204,8 +217,8 @@ def _bert_preprocess(self, record: Mapping[str, tf.Tensor]):
model_inputs = self._text_processor(segments)
if self._include_example_id:
model_inputs['example_id'] = record['example_id']
- y = record[self._label_field]
- return model_inputs, y
+ model_inputs[self._label_field] = record[self._label_field]
+ return model_inputs
def _decode(self, record: tf.Tensor):
"""Decodes a serialized tf.Example."""
diff --git a/official/nlp/data/sentence_prediction_dataloader_test.py b/official/nlp/data/sentence_prediction_dataloader_test.py
index cbced2ad2c3..85b1531716f 100644
--- a/official/nlp/data/sentence_prediction_dataloader_test.py
+++ b/official/nlp/data/sentence_prediction_dataloader_test.py
@@ -132,14 +132,40 @@ def test_load_dataset(self, label_type, expected_label_type):
global_batch_size=batch_size,
label_type=label_type)
dataset = loader.SentencePredictionDataLoader(data_config).load()
- features, labels = next(iter(dataset))
- self.assertCountEqual(['input_word_ids', 'input_mask', 'input_type_ids'],
- features.keys())
+ features = next(iter(dataset))
+ self.assertCountEqual(
+ ['input_word_ids', 'input_type_ids', 'input_mask', 'label_ids'],
+ features.keys())
self.assertEqual(features['input_word_ids'].shape, (batch_size, seq_length))
self.assertEqual(features['input_mask'].shape, (batch_size, seq_length))
self.assertEqual(features['input_type_ids'].shape, (batch_size, seq_length))
- self.assertEqual(labels.shape, (batch_size,))
- self.assertEqual(labels.dtype, expected_label_type)
+ self.assertEqual(features['label_ids'].shape, (batch_size,))
+ self.assertEqual(features['label_ids'].dtype, expected_label_type)
+
+ def test_load_dataset_with_label_mapping(self):
+ input_path = os.path.join(self.get_temp_dir(), 'train.tf_record')
+ batch_size = 10
+ seq_length = 128
+ _create_fake_preprocessed_dataset(input_path, seq_length, 'int')
+ data_config = loader.SentencePredictionDataConfig(
+ input_path=input_path,
+ seq_length=seq_length,
+ global_batch_size=batch_size,
+ label_type='int',
+ label_name=('label_ids', 'next_sentence_labels'))
+ dataset = loader.SentencePredictionDataLoader(data_config).load()
+ features = next(iter(dataset))
+ self.assertCountEqual([
+ 'input_word_ids', 'input_mask', 'input_type_ids',
+ 'next_sentence_labels', 'label_ids'
+ ], features.keys())
+ self.assertEqual(features['input_word_ids'].shape, (batch_size, seq_length))
+ self.assertEqual(features['input_mask'].shape, (batch_size, seq_length))
+ self.assertEqual(features['input_type_ids'].shape, (batch_size, seq_length))
+ self.assertEqual(features['label_ids'].shape, (batch_size,))
+ self.assertEqual(features['label_ids'].dtype, tf.int32)
+ self.assertEqual(features['next_sentence_labels'].shape, (batch_size,))
+ self.assertEqual(features['next_sentence_labels'].dtype, tf.int32)
class SentencePredictionTfdsDataLoaderTest(tf.test.TestCase,
@@ -170,13 +196,15 @@ def test_python_wordpiece_preprocessing(self, use_tfds):
lower_case=lower_case,
vocab_file=vocab_file_path)
dataset = loader.SentencePredictionTextDataLoader(data_config).load()
- features, labels = next(iter(dataset))
- self.assertCountEqual(['input_word_ids', 'input_type_ids', 'input_mask'],
- features.keys())
+ features = next(iter(dataset))
+ label_field = data_config.label_field
+ self.assertCountEqual(
+ ['input_word_ids', 'input_type_ids', 'input_mask', label_field],
+ features.keys())
self.assertEqual(features['input_word_ids'].shape, (batch_size, seq_length))
self.assertEqual(features['input_mask'].shape, (batch_size, seq_length))
self.assertEqual(features['input_type_ids'].shape, (batch_size, seq_length))
- self.assertEqual(labels.shape, (batch_size,))
+ self.assertEqual(features[label_field].shape, (batch_size,))
@parameterized.parameters(True, False)
def test_python_sentencepiece_preprocessing(self, use_tfds):
@@ -203,13 +231,15 @@ def test_python_sentencepiece_preprocessing(self, use_tfds):
vocab_file=sp_model_file_path,
)
dataset = loader.SentencePredictionTextDataLoader(data_config).load()
- features, labels = next(iter(dataset))
- self.assertCountEqual(['input_word_ids', 'input_type_ids', 'input_mask'],
- features.keys())
+ features = next(iter(dataset))
+ label_field = data_config.label_field
+ self.assertCountEqual(
+ ['input_word_ids', 'input_type_ids', 'input_mask', label_field],
+ features.keys())
self.assertEqual(features['input_word_ids'].shape, (batch_size, seq_length))
self.assertEqual(features['input_mask'].shape, (batch_size, seq_length))
self.assertEqual(features['input_type_ids'].shape, (batch_size, seq_length))
- self.assertEqual(labels.shape, (batch_size,))
+ self.assertEqual(features[label_field].shape, (batch_size,))
@parameterized.parameters(True, False)
def test_saved_model_preprocessing(self, use_tfds):
@@ -236,13 +266,15 @@ def test_saved_model_preprocessing(self, use_tfds):
label_type='int' if use_tfds else 'float',
)
dataset = loader.SentencePredictionTextDataLoader(data_config).load()
- features, labels = next(iter(dataset))
- self.assertCountEqual(['input_word_ids', 'input_type_ids', 'input_mask'],
- features.keys())
+ features = next(iter(dataset))
+ label_field = data_config.label_field
+ self.assertCountEqual(
+ ['input_word_ids', 'input_type_ids', 'input_mask', label_field],
+ features.keys())
self.assertEqual(features['input_word_ids'].shape, (batch_size, seq_length))
self.assertEqual(features['input_mask'].shape, (batch_size, seq_length))
self.assertEqual(features['input_type_ids'].shape, (batch_size, seq_length))
- self.assertEqual(labels.shape, (batch_size,))
+ self.assertEqual(features[label_field].shape, (batch_size,))
if __name__ == '__main__':
diff --git a/official/nlp/modeling/models/xlnet.py b/official/nlp/modeling/models/xlnet.py
index 4b5a54e7b8f..1e932ce21af 100644
--- a/official/nlp/modeling/models/xlnet.py
+++ b/official/nlp/modeling/models/xlnet.py
@@ -15,7 +15,7 @@
"""XLNet models."""
# pylint: disable=g-classes-have-attributes
-from typing import Any, Mapping, Union
+from typing import Any, Mapping, Optional, Union
import tensorflow as tf
@@ -99,7 +99,7 @@ def __init__(
network: Union[tf.keras.layers.Layer, tf.keras.Model],
mlm_activation=None,
mlm_initializer='glorot_uniform',
- name: str = None,
+ name: Optional[str] = None,
**kwargs):
super().__init__(name=name, **kwargs)
self._config = {
diff --git a/official/nlp/modeling/ops/sampling_module.py b/official/nlp/modeling/ops/sampling_module.py
index 5bd758fd911..a9270ba4bba 100644
--- a/official/nlp/modeling/ops/sampling_module.py
+++ b/official/nlp/modeling/ops/sampling_module.py
@@ -431,17 +431,17 @@ def _process_finished_state(
def _continue_search(self, state) -> tf.Tensor:
i = state[decoding_module.StateKeys.CUR_INDEX]
- return tf.less(i, self.max_decode_length)
+ # Have we reached max decoding length?
+ not_at_end = tf.less(i, self.max_decode_length)
+ # Have all sampled sequences reached an EOS?
+ all_has_eos = tf.reduce_all(
+ state[decoding_module.StateKeys.FINISHED_FLAGS],
+ axis=None,
+ name="search_finish_cond")
+ return tf.logical_and(not_at_end, tf.logical_not(all_has_eos))
def _finished_flags(self, topk_ids, state) -> tf.Tensor:
new_finished_flags = tf.equal(topk_ids, self.eos_id)
new_finished_flags = tf.logical_or(
new_finished_flags, state[decoding_module.StateKeys.FINISHED_FLAGS])
return new_finished_flags
-
-
-
-
-
-
-
diff --git a/official/nlp/projects/mobilebert/README.md b/official/nlp/projects/mobilebert/README.md
index 9209b4720d6..ef7ec1d62e4 100644
--- a/official/nlp/projects/mobilebert/README.md
+++ b/official/nlp/projects/mobilebert/README.md
@@ -22,7 +22,7 @@ modeling library:
* [mobile_bert_encoder.py](https://github.com/tensorflow/models/blob/master/official/nlp/modeling/networks/mobile_bert_encoder.py)
contains `MobileBERTEncoder` implementation.
* [mobile_bert_layers.py](https://github.com/tensorflow/models/blob/master/official/nlp/modeling/layers/mobile_bert_layers.py)
- contains `MobileBertEmbedding`, `MobileBertMaskedLM` and `MobileBertMaskedLM`
+ contains `MobileBertEmbedding`, `MobileBertTransformer` and `MobileBertMaskedLM`
implementation.
## Pre-trained Models
diff --git a/official/nlp/projects/teams/README.md b/official/nlp/projects/teams/README.md
new file mode 100644
index 00000000000..f57aa266d06
--- /dev/null
+++ b/official/nlp/projects/teams/README.md
@@ -0,0 +1,21 @@
+# TEAMS (Training ELECTRA Augmented with Multi-word Selection)
+
+**Note:** This project is working in progress and please stay tuned.
+
+TEAMS is a text encoder pre-training method that simultaneously learns a
+generator and a discriminator using multi-task learning. We propose a new
+pre-training task, multi-word selection, and combine it with previous
+pre-training tasks for efficient encoder pre-training. We also develop two
+techniques, attention-based task-specific heads and partial layer sharing,
+to further improve pre-training effectiveness.
+
+
+Our academic paper [[1]](#1) which describes TEAMS in detail can be found here:
+https://arxiv.org/abs/2106.00139.
+
+## References
+
+[1]
+Jiaming Shen, Jialu Liu, Tianqi Liu, Cong Yu and Jiawei Han, "Training ELECTRA
+Augmented with Multi-word Selection", Findings of the Association for
+Computational Linguistics: ACL 2021.
diff --git a/official/nlp/tasks/sentence_prediction.py b/official/nlp/tasks/sentence_prediction.py
index 64b9835fa6d..2f6b80361a8 100644
--- a/official/nlp/tasks/sentence_prediction.py
+++ b/official/nlp/tasks/sentence_prediction.py
@@ -69,6 +69,10 @@ def __init__(self, params: cfg.TaskConfig, logging_dir=None, name=None):
if params.metric_type not in METRIC_TYPES:
raise ValueError('Invalid metric_type: {}'.format(params.metric_type))
self.metric_type = params.metric_type
+ if hasattr(params.train_data, 'label_field'):
+ self.label_field = params.train_data.label_field
+ else:
+ self.label_field = 'label_ids'
def build_model(self):
if self.task_config.hub_module_url and self.task_config.init_checkpoint:
@@ -95,11 +99,12 @@ def build_model(self):
use_encoder_pooler=self.task_config.model.use_encoder_pooler)
def build_losses(self, labels, model_outputs, aux_losses=None) -> tf.Tensor:
+ label_ids = labels[self.label_field]
if self.task_config.model.num_classes == 1:
- loss = tf.keras.losses.mean_squared_error(labels, model_outputs)
+ loss = tf.keras.losses.mean_squared_error(label_ids, model_outputs)
else:
loss = tf.keras.losses.sparse_categorical_crossentropy(
- labels, tf.cast(model_outputs, tf.float32), from_logits=True)
+ label_ids, tf.cast(model_outputs, tf.float32), from_logits=True)
if aux_losses:
loss += tf.add_n(aux_losses)
@@ -120,7 +125,8 @@ def dummy_data(_):
y = tf.zeros((1,), dtype=tf.float32)
else:
y = tf.zeros((1, 1), dtype=tf.int32)
- return x, y
+ x[self.label_field] = y
+ return x
dataset = tf.data.Dataset.range(1)
dataset = dataset.repeat()
@@ -142,16 +148,16 @@ def build_metrics(self, training=None):
def process_metrics(self, metrics, labels, model_outputs):
for metric in metrics:
- metric.update_state(labels, model_outputs)
+ metric.update_state(labels[self.label_field], model_outputs)
def process_compiled_metrics(self, compiled_metrics, labels, model_outputs):
- compiled_metrics.update_state(labels, model_outputs)
+ compiled_metrics.update_state(labels[self.label_field], model_outputs)
def validation_step(self, inputs, model: tf.keras.Model, metrics=None):
if self.metric_type == 'accuracy':
return super(SentencePredictionTask,
self).validation_step(inputs, model, metrics)
- features, labels = inputs
+ features, labels = inputs, inputs
outputs = self.inference_step(features, model)
loss = self.build_losses(
labels=labels, model_outputs=outputs, aux_losses=model.losses)
@@ -161,12 +167,12 @@ def validation_step(self, inputs, model: tf.keras.Model, metrics=None):
'sentence_prediction': # Ensure one prediction along batch dimension.
tf.expand_dims(tf.math.argmax(outputs, axis=1), axis=1),
'labels':
- labels,
+ labels[self.label_field],
})
if self.metric_type == 'pearson_spearman_corr':
logs.update({
'sentence_prediction': outputs,
- 'labels': labels,
+ 'labels': labels[self.label_field],
})
return logs
@@ -206,10 +212,10 @@ def reduce_aggregated_logs(self, aggregated_logs, global_step=None):
def initialize(self, model):
"""Load a pretrained checkpoint (if exists) and then train from iter 0."""
ckpt_dir_or_file = self.task_config.init_checkpoint
- if tf.io.gfile.isdir(ckpt_dir_or_file):
- ckpt_dir_or_file = tf.train.latest_checkpoint(ckpt_dir_or_file)
if not ckpt_dir_or_file:
return
+ if tf.io.gfile.isdir(ckpt_dir_or_file):
+ ckpt_dir_or_file = tf.train.latest_checkpoint(ckpt_dir_or_file)
pretrain2finetune_mapping = {
'encoder': model.checkpoint_items['encoder'],
@@ -250,7 +256,7 @@ def predict(task: SentencePredictionTask,
def predict_step(inputs):
"""Replicated prediction calculation."""
- x, _ = inputs
+ x = inputs
example_id = x.pop('example_id')
outputs = task.inference_step(x, model)
return dict(example_id=example_id, predictions=outputs)
diff --git a/official/pip_package/setup.py b/official/pip_package/setup.py
index 0478191f5c5..cfc7a751f29 100644
--- a/official/pip_package/setup.py
+++ b/official/pip_package/setup.py
@@ -1,4 +1,4 @@
-# Copyright 2019 The TensorFlow Authors. All Rights Reserved.
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
@@ -11,7 +11,7 @@
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
-# ==============================================================================
+
"""Sets up TensorFlow Official Models."""
import datetime
import os
diff --git a/official/projects/README.md b/official/projects/README.md
new file mode 100644
index 00000000000..743baae887f
--- /dev/null
+++ b/official/projects/README.md
@@ -0,0 +1,2 @@
+This directory contains projects using TensorFlow Model Garden Modeling
+libraries.
diff --git a/official/staging/__init__.py b/official/staging/__init__.py
index e69de29bb2d..e419af524b5 100644
--- a/official/staging/__init__.py
+++ b/official/staging/__init__.py
@@ -0,0 +1,14 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
diff --git a/official/staging/training/__init__.py b/official/staging/training/__init__.py
index 931c2ef11db..e419af524b5 100644
--- a/official/staging/training/__init__.py
+++ b/official/staging/training/__init__.py
@@ -1,4 +1,4 @@
-# Copyright 2019 The TensorFlow Authors. All Rights Reserved.
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
@@ -11,4 +11,4 @@
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
-# ==============================================================================
+
diff --git a/official/staging/training/grad_utils.py b/official/staging/training/grad_utils.py
index 48e7566ed9a..1113d39d5e6 100644
--- a/official/staging/training/grad_utils.py
+++ b/official/staging/training/grad_utils.py
@@ -1,4 +1,4 @@
-# Copyright 2019 The TensorFlow Authors. All Rights Reserved.
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
@@ -11,7 +11,7 @@
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
-# ==============================================================================
+
"""Some gradient util functions to help users writing custom training loop."""
from absl import logging
diff --git a/official/vision/beta/configs/common.py b/official/vision/beta/configs/common.py
index fb407db82f8..f1b72121117 100644
--- a/official/vision/beta/configs/common.py
+++ b/official/vision/beta/configs/common.py
@@ -69,7 +69,15 @@ class PseudoLabelDataConfig(cfg.DataConfig):
"""Psuedo Label input config for training."""
input_path: str = ''
data_ratio: float = 1.0 # Per-batch ratio of pseudo-labeled to labeled data.
+ is_training: bool = True
+ dtype: str = 'float32'
+ shuffle_buffer_size: int = 10000
+ cycle_length: int = 10
aug_rand_hflip: bool = True
aug_type: Optional[
Augmentation] = None # Choose from AutoAugment and RandAugment.
file_type: str = 'tfrecord'
+
+ # Keep for backward compatibility.
+ aug_policy: Optional[str] = None # None, 'autoaug', or 'randaug'.
+ randaug_magnitude: Optional[int] = 10
diff --git a/official/vision/beta/configs/experiments/video_classification/k600_3d-resnet50g_tpu.yaml b/official/vision/beta/configs/experiments/video_classification/k600_3d-resnet50g_tpu.yaml
new file mode 100644
index 00000000000..3ae54c41564
--- /dev/null
+++ b/official/vision/beta/configs/experiments/video_classification/k600_3d-resnet50g_tpu.yaml
@@ -0,0 +1,112 @@
+# 3D ResNet-50g video classification on Kinetics-600.
+#
+# --experiment_type=video_classification_kinetics600
+# Expected accuracy: 78.7% accuracy, 93.6% top-5.
+# Train on TPU: v3-128, eval on TPU: v3-32
+runtime:
+ distribution_strategy: 'tpu'
+ mixed_precision_dtype: 'bfloat16'
+task:
+ init_checkpoint: null
+ init_checkpoint_modules: all
+ losses:
+ l2_weight_decay: 0.0001
+ label_smoothing: 0.0
+ model:
+ aggregate_endpoints: false
+ backbone:
+ resnet_3d:
+ block_specs: !!python/tuple
+ - temporal_kernel_sizes: !!python/tuple
+ - 3
+ - 3
+ - 3
+ temporal_strides: 1
+ use_self_gating: true
+ - temporal_kernel_sizes: !!python/tuple
+ - 3
+ - 1
+ - 3
+ - 1
+ temporal_strides: 1
+ use_self_gating: true
+ - temporal_kernel_sizes: !!python/tuple
+ - 3
+ - 1
+ - 3
+ - 1
+ - 3
+ - 1
+ temporal_strides: 1
+ use_self_gating: true
+ - temporal_kernel_sizes: !!python/tuple
+ - 1
+ - 3
+ - 1
+ temporal_strides: 1
+ use_self_gating: true
+ model_id: 50
+ stem_conv_temporal_kernel_size: 5
+ stem_conv_temporal_stride: 2
+ stem_pool_temporal_stride: 2
+ stem_type: v0
+ stochastic_depth_drop_rate: 0.0
+ type: resnet_3d
+ dropout_rate: 0.2
+ model_type: video_classification
+ norm_activation:
+ activation: relu
+ norm_epsilon: 1.0e-05
+ norm_momentum: 0.9
+ use_sync_bn: false
+ train_data:
+ aug_max_area_ratio: 1.0
+ aug_max_aspect_ratio: 2.0
+ aug_min_area_ratio: 0.49
+ aug_min_aspect_ratio: 0.5
+ drop_remainder: true
+ dtype: 'bfloat16'
+ feature_shape: !!python/tuple
+ - 64
+ - 224
+ - 224
+ - 3
+ global_batch_size: 1024
+ min_image_size: 256
+ name: kinetics600
+ num_classes: 600
+ split: train
+ validation_data:
+ dtype: 'bfloat16'
+ feature_shape: !!python/tuple
+ - 250
+ - 224
+ - 224
+ - 3
+ global_batch_size: 64
+ min_image_size: 256
+ name: kinetics600
+ num_classes: 600
+ num_examples: 27780
+ num_test_clips: 1
+ num_test_crops: 1
+ one_hot: true
+trainer:
+ optimizer_config:
+ learning_rate:
+ cosine:
+ alpha: 0.0
+ decay_steps: 71400
+ initial_learning_rate: 1.6
+ name: CosineDecay
+ type: cosine
+ warmup:
+ linear:
+ name: linear
+ warmup_learning_rate: 0
+ warmup_steps: 1785
+ type: linear
+ train_steps: 71400
+ steps_per_loop: 500
+ summary_interval: 500
+ validation_interval: 500
diff --git a/official/vision/beta/configs/image_classification.py b/official/vision/beta/configs/image_classification.py
index 7044a4c0004..b98354a8587 100644
--- a/official/vision/beta/configs/image_classification.py
+++ b/official/vision/beta/configs/image_classification.py
@@ -43,6 +43,7 @@ class DataConfig(cfg.DataConfig):
file_type: str = 'tfrecord'
image_field_key: str = 'image/encoded'
label_field_key: str = 'image/class/label'
+ decode_jpeg_only: bool = True
# Keep for backward compatibility.
aug_policy: Optional[str] = None # None, 'autoaug', or 'randaug'.
diff --git a/official/vision/beta/data/create_coco_tf_record.py b/official/vision/beta/data/create_coco_tf_record.py
index 27102446142..2e389f02a2c 100644
--- a/official/vision/beta/data/create_coco_tf_record.py
+++ b/official/vision/beta/data/create_coco_tf_record.py
@@ -46,7 +46,7 @@
flags.DEFINE_boolean(
'include_masks', False, 'Whether to include instance segmentations masks '
'(PNG encoded) in the result. default: False.')
-flags.DEFINE_string('image_dir', '', 'Directory containing images.')
+flags.DEFINE_multi_string('image_dir', '', 'Directory containing images.')
flags.DEFINE_string(
'image_info_file', '', 'File containing image information. '
'Tf Examples in the output files correspond to the image '
@@ -159,7 +159,7 @@ def encode_caption_annotations(caption_annotations):
def create_tf_example(image,
- image_dir,
+ image_dirs,
bbox_annotations=None,
id_to_name_map=None,
caption_annotations=None,
@@ -169,7 +169,7 @@ def create_tf_example(image,
Args:
image: dict with keys: [u'license', u'file_name', u'coco_url', u'height',
u'width', u'date_captured', u'flickr_url', u'id']
- image_dir: directory containing the image files.
+ image_dirs: list of directories containing the image files.
bbox_annotations:
list of dicts with keys: [u'segmentation', u'area', u'iscrowd',
u'image_id', u'bbox', u'category_id', u'id'] Notice that bounding box
@@ -190,14 +190,31 @@ def create_tf_example(image,
num_annotations_skipped: Number of (invalid) annotations that were ignored.
Raises:
- ValueError: if the image pointed to by data['filename'] is not a valid JPEG
+ ValueError: if the image pointed to by data['filename'] is not a valid JPEG,
+ does not exist, or is not unique across image directories.
"""
image_height = image['height']
image_width = image['width']
filename = image['file_name']
image_id = image['id']
- full_path = os.path.join(image_dir, filename)
+ if len(image_dirs) > 1:
+ full_paths = [os.path.join(image_dir, filename) for image_dir in image_dirs]
+ full_existing_paths = [p for p in full_paths if tf.io.gfile.exists(p)]
+ if not full_existing_paths:
+ raise ValueError(
+ '{} does not exist across image directories.'.format(filename))
+ if len(full_existing_paths) > 1:
+ raise ValueError(
+ '{} is not unique across image directories'.format(filename))
+ full_path, = full_existing_paths
+ # If there is only one image directory, it's not worth checking for existence,
+ # since trying to open the file will raise an informative error message if it
+ # does not exist.
+ else:
+ image_dir, = image_dirs
+ full_path = os.path.join(image_dir, filename)
+
with tf.io.gfile.GFile(full_path, 'rb') as fid:
encoded_jpg = fid.read()
@@ -276,7 +293,7 @@ def _load_images_info(images_info_file):
return info_dict['images']
-def generate_annotations(images, image_dir,
+def generate_annotations(images, image_dirs,
img_to_obj_annotation=None,
img_to_caption_annotation=None, id_to_name_map=None,
include_masks=False):
@@ -289,12 +306,12 @@ def generate_annotations(images, image_dir,
caption_annotaion = (img_to_caption_annotation.get(image['id'], None) if
img_to_caption_annotation else None)
- yield (image, image_dir, object_annotation, id_to_name_map,
+ yield (image, image_dirs, object_annotation, id_to_name_map,
caption_annotaion, include_masks)
def _create_tf_record_from_coco_annotations(images_info_file,
- image_dir,
+ image_dirs,
output_path,
num_shards,
object_annotations_file=None,
@@ -309,7 +326,7 @@ def _create_tf_record_from_coco_annotations(images_info_file,
files Eg. 'image_info_test-dev2017.json',
'instance_annotations_train2017.json',
'caption_annotations_train2017.json', etc.
- image_dir: Directory containing the image files.
+ image_dirs: List of directories containing the image files.
output_path: Path to output tf.Record file.
num_shards: Number of output files to create.
object_annotations_file: JSON file containing bounding box annotations.
@@ -333,7 +350,7 @@ def _create_tf_record_from_coco_annotations(images_info_file,
_load_caption_annotations(caption_annotations_file))
coco_annotations_iter = generate_annotations(
- images, image_dir, img_to_obj_annotation, img_to_caption_annotation,
+ images, image_dirs, img_to_obj_annotation, img_to_caption_annotation,
id_to_name_map=id_to_name_map, include_masks=include_masks)
num_skipped = tfrecord_lib.write_tf_record_dataset(
diff --git a/official/vision/beta/data/process_coco_few_shot.sh b/official/vision/beta/data/process_coco_few_shot.sh
new file mode 100644
index 00000000000..686a31df164
--- /dev/null
+++ b/official/vision/beta/data/process_coco_few_shot.sh
@@ -0,0 +1,48 @@
+#!/bin/bash
+#
+# Processes the COCO few-shot benchmark into TFRecord files. Requires `wget`.
+
+tmp_dir=$(mktemp -d -t coco-XXXXXXXXXX)
+output_dir="/tmp/coco_few_shot"
+while getopts "o:" o; do
+ case "${o}" in
+ o) output_dir=${OPTARG} ;;
+ *) echo "Usage: ${0} [-o ]" 1>&2; exit 1 ;;
+ esac
+done
+
+cocosplit_url="dl.yf.io/fs-det/datasets/cocosplit"
+wget --recursive --no-parent -q --show-progress --progress=bar:force:noscroll \
+ -P "${tmp_dir}" -A "5k.json,*10shot*.json,*30shot*.json" \
+ "http://${cocosplit_url}/"
+mv "${tmp_dir}/${cocosplit_url}/"* "${tmp_dir}"
+rm -rf "${tmp_dir}/${cocosplit_url}/"
+
+python process_coco_few_shot_json_files.py \
+ --logtostderr --workdir="${tmp_dir}"
+
+for seed in {0..9}; do
+ for shots in 10 30; do
+ python create_coco_tf_record.py \
+ --logtostderr \
+ --image_dir=/namespace/vale-project/datasets/mscoco_raw/images/train2014 \
+ --image_dir=/namespace/vale-project/datasets/mscoco_raw/images/val2014 \
+ --image_info_file="${tmp_dir}/${shots}shot_seed${seed}.json" \
+ --object_annotations_file="${tmp_dir}/${shots}shot_seed${seed}.json" \
+ --caption_annotations_file="" \
+ --output_file_prefix="${output_dir}/${shots}shot_seed${seed}" \
+ --num_shards=4
+ done
+done
+
+python create_coco_tf_record.py \
+ --logtostderr \
+ --image_dir=/namespace/vale-project/datasets/mscoco_raw/images/train2014 \
+ --image_dir=/namespace/vale-project/datasets/mscoco_raw/images/val2014 \
+ --image_info_file="${tmp_dir}/datasplit/5k.json" \
+ --object_annotations_file="${tmp_dir}/datasplit/5k.json" \
+ --caption_annotations_file="" \
+ --output_file_prefix="${output_dir}/5k" \
+ --num_shards=10
+
+rm -rf "${tmp_dir}"
diff --git a/official/vision/beta/data/process_coco_few_shot_json_files.py b/official/vision/beta/data/process_coco_few_shot_json_files.py
new file mode 100644
index 00000000000..7a04cdd2c02
--- /dev/null
+++ b/official/vision/beta/data/process_coco_few_shot_json_files.py
@@ -0,0 +1,124 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+"""Processes the JSON files for COCO few-shot.
+
+We assume that `workdir` mirrors the contents of
+http://dl.yf.io/fs-det/datasets/cocosplit/, which contains the official JSON
+files for the few-shot COCO evaluation procedure that Wang et al. (2020)'s
+"Frustratingly Simple Few-Shot Object Detection" paper uses.
+"""
+
+import collections
+import itertools
+import json
+import logging
+import os
+
+from absl import app
+from absl import flags
+
+import tensorflow as tf
+
+logger = tf.get_logger()
+logger.setLevel(logging.INFO)
+
+flags.DEFINE_string('workdir', None, 'Working directory.')
+
+FLAGS = flags.FLAGS
+CATEGORIES = ['airplane', 'apple', 'backpack', 'banana', 'baseball bat',
+ 'baseball glove', 'bear', 'bed', 'bench', 'bicycle', 'bird',
+ 'boat', 'book', 'bottle', 'bowl', 'broccoli', 'bus', 'cake',
+ 'car', 'carrot', 'cat', 'cell phone', 'chair', 'clock', 'couch',
+ 'cow', 'cup', 'dining table', 'dog', 'donut', 'elephant',
+ 'fire hydrant', 'fork', 'frisbee', 'giraffe', 'hair drier',
+ 'handbag', 'horse', 'hot dog', 'keyboard', 'kite', 'knife',
+ 'laptop', 'microwave', 'motorcycle', 'mouse', 'orange', 'oven',
+ 'parking meter', 'person', 'pizza', 'potted plant',
+ 'refrigerator', 'remote', 'sandwich', 'scissors', 'sheep',
+ 'sink', 'skateboard', 'skis', 'snowboard', 'spoon', 'sports ball',
+ 'stop sign', 'suitcase', 'surfboard', 'teddy bear',
+ 'tennis racket', 'tie', 'toaster', 'toilet', 'toothbrush',
+ 'traffic light', 'train', 'truck', 'tv', 'umbrella', 'vase',
+ 'wine glass', 'zebra']
+SEEDS = list(range(10))
+SHOTS = [10, 30]
+
+FILE_SUFFIXES = collections.defaultdict(list)
+for _seed, _shots in itertools.product(SEEDS, SHOTS):
+ for _category in CATEGORIES:
+ FILE_SUFFIXES[(_seed, _shots)].append(
+ '{}full_box_{}shot_{}_trainval.json'.format(
+ # http://dl.yf.io/fs-det/datasets/cocosplit/ is organized like so:
+ #
+ # datasplit/
+ # trainvalno5k.json
+ # 5k.json
+ # full_box_{1,2,3,5,10,30}shot_{category}_trainval.json
+ # seed{1-9}/
+ # full_box_{1,2,3,5,10,30}shot_{category}_trainval.json
+ #
+ # This means that the JSON files for seed0 are located in the root
+ # directory rather than in a `seed?/` subdirectory, hence the
+ # conditional expression below.
+ '' if _seed == 0 else 'seed{}/'.format(_seed),
+ _shots,
+ _category))
+
+
+def main(unused_argv):
+ workdir = FLAGS.workdir
+
+ for seed, shots in itertools.product(SEEDS, SHOTS):
+ # Retrieve all examples for a given seed and shots setting.
+ file_paths = [os.path.join(workdir, suffix)
+ for suffix in FILE_SUFFIXES[(seed, shots)]]
+ json_dicts = []
+ for file_path in file_paths:
+ with tf.io.gfile.GFile(file_path, 'r') as f:
+ json_dicts.append(json.load(f))
+
+ # Make sure that all JSON files for a given seed and shots setting have the
+ # same metadata. We count on this to fuse them later on.
+ metadata_dicts = [{'info': d['info'], 'licenses': d['licenses'],
+ 'categories': d['categories']} for d in json_dicts]
+ if not all(d == metadata_dicts[0] for d in metadata_dicts[1:]):
+ raise RuntimeError(
+ 'JSON files for {} shots (seed {}) '.format(shots, seed) +
+ 'have different info, licences, or categories fields')
+
+ # Retrieve images across all JSON files.
+ images = sum((d['images'] for d in json_dicts), [])
+ # Remove duplicate image entries.
+ images = list({image['id']: image for image in images}.values())
+
+ output_dict = {
+ 'info': json_dicts[0]['info'],
+ 'licenses': json_dicts[0]['licenses'],
+ 'categories': json_dicts[0]['categories'],
+ 'images': images,
+ 'annotations': sum((d['annotations'] for d in json_dicts), [])
+ }
+
+ output_path = os.path.join(workdir,
+ '{}shot_seed{}.json'.format(shots, seed))
+ with tf.io.gfile.GFile(output_path, 'w') as f:
+ json.dump(output_dict, f)
+ logger.info('Processed %d shots (seed %d) and saved to %s',
+ shots, seed, output_path)
+
+
+if __name__ == '__main__':
+ flags.mark_flag_as_required('workdir')
+ app.run(main)
diff --git a/official/vision/beta/dataloaders/classification_input.py b/official/vision/beta/dataloaders/classification_input.py
index 3f12d043ee7..734d84dd6dd 100644
--- a/official/vision/beta/dataloaders/classification_input.py
+++ b/official/vision/beta/dataloaders/classification_input.py
@@ -66,6 +66,7 @@ def __init__(self,
num_classes: float,
image_field_key: str = DEFAULT_IMAGE_FIELD_KEY,
label_field_key: str = DEFAULT_LABEL_FIELD_KEY,
+ decode_jpeg_only: bool = True,
aug_rand_hflip: bool = True,
aug_type: Optional[common.Augmentation] = None,
is_multilabel: bool = False,
@@ -78,6 +79,8 @@ def __init__(self,
num_classes: `float`, number of classes.
image_field_key: `str`, the key name to encoded image in tf.Example.
label_field_key: `str`, the key name to label in tf.Example.
+ decode_jpeg_only: `bool`, if True, only JPEG format is decoded, this is
+ faster than decoding other types. Default is True.
aug_rand_hflip: `bool`, if True, augment training with random
horizontal flip.
aug_type: An optional Augmentation object to choose from AutoAugment and
@@ -118,6 +121,7 @@ def __init__(self,
self._augmenter = None
self._label_field_key = label_field_key
self._is_multilabel = is_multilabel
+ self._decode_jpeg_only = decode_jpeg_only
def _parse_train_data(self, decoded_tensors):
"""Parses data for training."""
@@ -142,16 +146,29 @@ def _parse_eval_data(self, decoded_tensors):
def _parse_train_image(self, decoded_tensors):
"""Parses image data for training."""
image_bytes = decoded_tensors[self._image_field_key]
- image_shape = tf.image.extract_jpeg_shape(image_bytes)
- # Crops image.
- # TODO(pengchong): support image format other than JPEG.
- cropped_image = preprocess_ops.random_crop_image_v2(
- image_bytes, image_shape)
- image = tf.cond(
- tf.reduce_all(tf.equal(tf.shape(cropped_image), image_shape)),
- lambda: preprocess_ops.center_crop_image_v2(image_bytes, image_shape),
- lambda: cropped_image)
+ if self._decode_jpeg_only:
+ image_shape = tf.image.extract_jpeg_shape(image_bytes)
+
+ # Crops image.
+ cropped_image = preprocess_ops.random_crop_image_v2(
+ image_bytes, image_shape)
+ image = tf.cond(
+ tf.reduce_all(tf.equal(tf.shape(cropped_image), image_shape)),
+ lambda: preprocess_ops.center_crop_image_v2(image_bytes, image_shape),
+ lambda: cropped_image)
+ else:
+ # Decodes image.
+ image = tf.io.decode_image(image_bytes, channels=3)
+ image.set_shape([None, None, 3])
+
+ # Crops image.
+ cropped_image = preprocess_ops.random_crop_image(image)
+
+ image = tf.cond(
+ tf.reduce_all(tf.equal(tf.shape(cropped_image), tf.shape(image))),
+ lambda: preprocess_ops.center_crop_image(image),
+ lambda: cropped_image)
if self._aug_rand_hflip:
image = tf.image.random_flip_left_right(image)
@@ -159,6 +176,7 @@ def _parse_train_image(self, decoded_tensors):
# Resizes image.
image = tf.image.resize(
image, self._output_size, method=tf.image.ResizeMethod.BILINEAR)
+ image.set_shape([self._output_size[0], self._output_size[1], 3])
# Apply autoaug or randaug.
if self._augmenter is not None:
@@ -177,15 +195,23 @@ def _parse_train_image(self, decoded_tensors):
def _parse_eval_image(self, decoded_tensors):
"""Parses image data for evaluation."""
image_bytes = decoded_tensors[self._image_field_key]
- image_shape = tf.image.extract_jpeg_shape(image_bytes)
- # Center crops and resizes image.
- image = preprocess_ops.center_crop_image_v2(image_bytes, image_shape)
+ if self._decode_jpeg_only:
+ image_shape = tf.image.extract_jpeg_shape(image_bytes)
+
+ # Center crops.
+ image = preprocess_ops.center_crop_image_v2(image_bytes, image_shape)
+ else:
+ # Decodes image.
+ image = tf.io.decode_image(image_bytes, channels=3)
+ image.set_shape([None, None, 3])
+
+ # Center crops.
+ image = preprocess_ops.center_crop_image(image)
image = tf.image.resize(
image, self._output_size, method=tf.image.ResizeMethod.BILINEAR)
-
- image = tf.reshape(image, [self._output_size[0], self._output_size[1], 3])
+ image.set_shape([self._output_size[0], self._output_size[1], 3])
# Normalizes image with mean and std pixel values.
image = preprocess_ops.normalize_image(image,
diff --git a/official/vision/beta/dataloaders/tfexample_utils.py b/official/vision/beta/dataloaders/tfexample_utils.py
index b64d24ff35b..8e55e3c55ff 100644
--- a/official/vision/beta/dataloaders/tfexample_utils.py
+++ b/official/vision/beta/dataloaders/tfexample_utils.py
@@ -127,10 +127,12 @@ def _encode_image(image_array: np.ndarray, fmt: str) -> bytes:
def create_classification_example(
image_height: int,
image_width: int,
+ image_format: str = 'JPEG',
is_multilabel: bool = False) -> tf.train.Example:
"""Creates image and labels for image classification input pipeline."""
image = _encode_image(
- np.uint8(np.random.rand(image_height, image_width, 3) * 255), fmt='JPEG')
+ np.uint8(np.random.rand(image_height, image_width, 3) * 255),
+ fmt=image_format)
labels = [0, 1] if is_multilabel else [0]
serialized_example = tf.train.Example(
features=tf.train.Features(
diff --git a/official/vision/beta/modeling/backbones/mobilenet.py b/official/vision/beta/modeling/backbones/mobilenet.py
index 84647962c6f..0d77c8facdd 100644
--- a/official/vision/beta/modeling/backbones/mobilenet.py
+++ b/official/vision/beta/modeling/backbones/mobilenet.py
@@ -502,7 +502,7 @@ def __init__(
kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
# The followings should be kept the same most of the times.
- output_stride: int = None,
+ output_stride: Optional[int] = None,
min_depth: int = 8,
# divisible is not used in MobileNetV1.
divisible_by: int = 8,
@@ -768,7 +768,8 @@ def build_mobilenet(
input_specs: tf.keras.layers.InputSpec,
backbone_config: hyperparams.Config,
norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model:
+ l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
+) -> tf.keras.Model:
"""Builds MobileNet backbone from a config."""
backbone_type = backbone_config.type
backbone_cfg = backbone_config.get()
diff --git a/official/vision/beta/modeling/backbones/resnet_3d.py b/official/vision/beta/modeling/backbones/resnet_3d.py
index b9207a4a317..f1876df24bd 100644
--- a/official/vision/beta/modeling/backbones/resnet_3d.py
+++ b/official/vision/beta/modeling/backbones/resnet_3d.py
@@ -81,7 +81,7 @@ def __init__(
model_id: int,
temporal_strides: List[int],
temporal_kernel_sizes: List[Tuple[int]],
- use_self_gating: List[int] = None,
+ use_self_gating: Optional[List[int]] = None,
input_specs: tf.keras.layers.InputSpec = layers.InputSpec(
shape=[None, None, None, None, 3]),
stem_type: str = 'v0',
@@ -380,7 +380,8 @@ def build_resnet3d(
input_specs: tf.keras.layers.InputSpec,
backbone_config: hyperparams.Config,
norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model:
+ l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
+) -> tf.keras.Model:
"""Builds ResNet 3d backbone from a config."""
backbone_cfg = backbone_config.get()
@@ -418,7 +419,8 @@ def build_resnet3d_rs(
input_specs: tf.keras.layers.InputSpec,
backbone_config: hyperparams.Config,
norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model:
+ l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
+) -> tf.keras.Model:
"""Builds ResNet-3D-RS backbone from a config."""
backbone_cfg = backbone_config.get()
diff --git a/official/vision/beta/modeling/heads/dense_prediction_heads.py b/official/vision/beta/modeling/heads/dense_prediction_heads.py
index a9da2d3b32f..fc9fdf0b38c 100644
--- a/official/vision/beta/modeling/heads/dense_prediction_heads.py
+++ b/official/vision/beta/modeling/heads/dense_prediction_heads.py
@@ -36,7 +36,7 @@ def __init__(
num_anchors_per_location: int,
num_convs: int = 4,
num_filters: int = 256,
- attribute_heads: List[Dict[str, Any]] = None,
+ attribute_heads: Optional[List[Dict[str, Any]]] = None,
use_separable_conv: bool = False,
activation: str = 'relu',
use_sync_bn: bool = False,
diff --git a/official/vision/beta/modeling/layers/detection_generator.py b/official/vision/beta/modeling/layers/detection_generator.py
index b069a199ea8..2c2948714f6 100644
--- a/official/vision/beta/modeling/layers/detection_generator.py
+++ b/official/vision/beta/modeling/layers/detection_generator.py
@@ -593,7 +593,7 @@ def __call__(self,
raw_scores: Mapping[str, tf.Tensor],
anchor_boxes: tf.Tensor,
image_shape: tf.Tensor,
- raw_attributes: Mapping[str, tf.Tensor] = None):
+ raw_attributes: Optional[Mapping[str, tf.Tensor]] = None):
"""Generates final detections.
Args:
diff --git a/official/vision/beta/modeling/layers/nn_layers.py b/official/vision/beta/modeling/layers/nn_layers.py
index f44b17a25ca..96ef9005ae4 100644
--- a/official/vision/beta/modeling/layers/nn_layers.py
+++ b/official/vision/beta/modeling/layers/nn_layers.py
@@ -132,8 +132,7 @@ def __init__(self,
def build(self, input_shape):
num_reduced_filters = make_divisible(
- max(1, int(self._in_filters * self._se_ratio)),
- divisor=self._divisible_by)
+ self._in_filters * self._se_ratio, divisor=self._divisible_by)
self._se_reduce = tf.keras.layers.Conv2D(
filters=num_reduced_filters,
@@ -282,9 +281,6 @@ class Scale(tf.keras.layers.Layer):
This is useful for applying ReZero to layers, which improves convergence
speed. This implements the paper:
-
- Thomas Bachlechner, Bodhisattwa Prasad Majumder, Huanru Henry Mao,
- Garrison W. Cottrell, Julian McAuley.
ReZero is All You Need: Fast Convergence at Large Depth.
(https://arxiv.org/pdf/2003.04887.pdf).
"""
@@ -372,6 +368,7 @@ class PositionalEncoding(tf.keras.layers.Layer):
def __init__(self,
initializer: tf.keras.initializers.Initializer = 'zeros',
cache_encoding: bool = False,
+ state_prefix: Optional[str] = None,
**kwargs):
"""Initializes positional encoding.
@@ -381,6 +378,7 @@ def __init__(self,
after calling build. Otherwise, rebuild the tensor for every call.
Setting this to False can be useful when we want to input a variable
number of frames, so the positional encoding tensor can change shape.
+ state_prefix: a prefix string to identify states.
**kwargs: Additional keyword arguments to be passed to this layer.
Returns:
@@ -391,33 +389,43 @@ def __init__(self,
self._cache_encoding = cache_encoding
self._pos_encoding = None
self._rezero = Scale(initializer=initializer, name='rezero')
+ state_prefix = state_prefix if state_prefix is not None else ''
+ self._state_prefix = state_prefix
+ self._frame_count_name = f'{state_prefix}/pos_enc_frame_count'
def get_config(self):
"""Returns a dictionary containing the config used for initialization."""
config = {
'initializer': self._initializer,
'cache_encoding': self._cache_encoding,
+ 'state_prefix': self._state_prefix,
}
base_config = super(PositionalEncoding, self).get_config()
return dict(list(base_config.items()) + list(config.items()))
def _positional_encoding(self,
- num_positions: int,
- hidden_size: int,
- dtype: tf.DType = tf.float32):
+ num_positions: Union[int, tf.Tensor],
+ hidden_size: Union[int, tf.Tensor],
+ start_position: Union[int, tf.Tensor] = 0,
+ dtype: str = 'float32') -> tf.Tensor:
"""Creates a sequence of sinusoidal positional encoding vectors.
Args:
- num_positions: An `int` of number of positions (frames).
- hidden_size: An `int` of number of channels used for the hidden vectors.
- dtype: The dtype of the output tensor.
+ num_positions: the total number of positions (frames).
+ hidden_size: the number of channels used for the hidden vectors.
+ start_position: the start position.
+ dtype: the dtype of the output tensor.
Returns:
The positional encoding tensor with shape [num_positions, hidden_size].
"""
+ if isinstance(start_position, tf.Tensor) and start_position.shape.rank == 1:
+ start_position = start_position[0]
+
# Calling `tf.range` with `dtype=tf.bfloat16` results in an error,
# so we cast afterward.
- positions = tf.cast(tf.range(num_positions)[:, tf.newaxis], dtype)
+ positions = tf.range(start_position, start_position + num_positions)
+ positions = tf.cast(positions, dtype)[:, tf.newaxis]
idx = tf.range(hidden_size)[tf.newaxis, :]
power = tf.cast(2 * (idx // 2), dtype)
@@ -431,11 +439,24 @@ def _positional_encoding(self,
return pos_encoding
- def _get_pos_encoding(self, input_shape):
- """Calculates the positional encoding from the input shape."""
+ def _get_pos_encoding(self,
+ input_shape: tf.Tensor,
+ frame_count: int = 0) -> tf.Tensor:
+ """Calculates the positional encoding from the input shape.
+
+ Args:
+ input_shape: the shape of the input.
+ frame_count: a count of frames that indicates the index of the first
+ frame.
+
+ Returns:
+ The positional encoding tensor with shape [num_positions, hidden_size].
+
+ """
frames = input_shape[1]
channels = input_shape[-1]
- pos_encoding = self._positional_encoding(frames, channels, dtype=self.dtype)
+ pos_encoding = self._positional_encoding(
+ frames, channels, start_position=frame_count, dtype=self.dtype)
pos_encoding = tf.reshape(pos_encoding, [1, frames, 1, 1, channels])
return pos_encoding
@@ -456,16 +477,46 @@ def build(self, input_shape):
super(PositionalEncoding, self).build(input_shape)
- def call(self, inputs):
- """Calls the layer with the given inputs."""
+ def call(
+ self,
+ inputs: tf.Tensor,
+ states: Optional[States] = None,
+ output_states: bool = True,
+ ) -> Union[tf.Tensor, Tuple[tf.Tensor, States]]:
+ """Calls the layer with the given inputs.
+
+ Args:
+ inputs: An input `tf.Tensor`.
+ states: A `dict` of states such that, if any of the keys match for this
+ layer, will overwrite the contents of the buffer(s). Expected keys
+ include `state_prefix + '/pos_enc_frame_count'`.
+ output_states: A `bool`. If True, returns the output tensor and output
+ states. Returns just the output tensor otherwise.
+
+ Returns:
+ An output `tf.Tensor` (and optionally the states if `output_states=True`).
+
+ Raises:
+ ValueError: If using 'channels_first' data format.
+ """
+ states = dict(states) if states is not None else {}
+
+ # Keep a count of frames encountered across input iterations in
+ # num_frames to be able to accurately update the positional encoding.
+ num_frames = tf.shape(inputs)[1]
+ frame_count = tf.cast(states.get(self._frame_count_name, [0]), tf.int32)
+ states[self._frame_count_name] = frame_count + num_frames
+
if self._cache_encoding:
pos_encoding = self._pos_encoding
else:
- pos_encoding = self._get_pos_encoding(tf.shape(inputs))
+ pos_encoding = self._get_pos_encoding(
+ tf.shape(inputs), frame_count=frame_count)
pos_encoding = tf.cast(pos_encoding, inputs.dtype)
- pos_encoding = tf.stop_gradient(pos_encoding)
pos_encoding = self._rezero(pos_encoding)
- return inputs + pos_encoding
+ outputs = inputs + pos_encoding
+
+ return (outputs, states) if output_states else outputs
@tf.keras.utils.register_keras_serializable(package='Vision')
@@ -481,6 +532,7 @@ class GlobalAveragePool3D(tf.keras.layers.Layer):
def __init__(self,
keepdims: bool = False,
causal: bool = False,
+ state_prefix: Optional[str] = None,
**kwargs):
"""Initializes a global average pool layer.
@@ -488,6 +540,7 @@ def __init__(self,
keepdims: A `bool`. If True, keep the averaged dimensions.
causal: A `bool` of whether to run in causal mode with a cumulative sum
across frames.
+ state_prefix: a prefix string to identify states.
**kwargs: Additional keyword arguments to be passed to this layer.
Returns:
@@ -497,29 +550,22 @@ def __init__(self,
self._keepdims = keepdims
self._causal = causal
+ state_prefix = state_prefix if state_prefix is not None else ''
+ self._state_prefix = state_prefix
- self._frame_count = None
+ self._state_name = f'{state_prefix}/pool_buffer'
+ self._frame_count_name = f'{state_prefix}/pool_frame_count'
def get_config(self):
"""Returns a dictionary containing the config used for initialization."""
config = {
'keepdims': self._keepdims,
'causal': self._causal,
+ 'state_prefix': self._state_prefix,
}
base_config = super(GlobalAveragePool3D, self).get_config()
return dict(list(base_config.items()) + list(config.items()))
- def build(self, input_shape):
- """Builds the layer with the given input shape."""
- # Here we define strings that will uniquely reference the buffer states
- # in the TF graph. These will be used for passing in a mapping of states
- # for streaming mode. To do this, we can use a name scope.
- with tf.name_scope('buffer') as state_name:
- self._state_name = state_name
- self._frame_count_name = state_name + '_frame_count'
-
- super(GlobalAveragePool3D, self).build(input_shape)
-
def call(self,
inputs: tf.Tensor,
states: Optional[States] = None,
@@ -531,6 +577,8 @@ def call(self,
inputs: An input `tf.Tensor`.
states: A `dict` of states such that, if any of the keys match for this
layer, will overwrite the contents of the buffer(s).
+ Expected keys include `state_prefix + '/pool_buffer'` and
+ `state_prefix + '/pool_frame_count'`.
output_states: A `bool`. If True, returns the output tensor and output
states. Returns just the output tensor otherwise.
@@ -562,7 +610,8 @@ def call(self,
# num_frames to be able to accurately take a cumulative average across
# all frames when running in streaming mode
num_frames = tf.shape(inputs)[1]
- frame_count = states.get(self._frame_count_name, 0)
+ frame_count = states.get(self._frame_count_name, tf.constant([0]))
+ frame_count = tf.cast(frame_count, tf.int32)
states[self._frame_count_name] = frame_count + num_frames
if self._causal:
diff --git a/official/vision/beta/modeling/layers/nn_layers_test.py b/official/vision/beta/modeling/layers/nn_layers_test.py
index 50af2b10057..979355bcfe4 100644
--- a/official/vision/beta/modeling/layers/nn_layers_test.py
+++ b/official/vision/beta/modeling/layers/nn_layers_test.py
@@ -48,8 +48,8 @@ def test_positional_encoding(self):
initializer='ones', cache_encoding=True)
inputs = tf.ones([1, 4, 1, 1, 3])
- outputs = pos_encoding(inputs)
- outputs_cached = pos_encoding_cached(inputs)
+ outputs, _ = pos_encoding(inputs)
+ outputs_cached, _ = pos_encoding_cached(inputs)
expected = tf.constant(
[[[[[1.0000000, 1.0000000, 2.0000000]]],
@@ -70,7 +70,7 @@ def test_positional_encoding_bfloat16(self):
pos_encoding = nn_layers.PositionalEncoding(initializer='ones')
inputs = tf.ones([1, 4, 1, 1, 3], dtype=tf.bfloat16)
- outputs = pos_encoding(inputs)
+ outputs, _ = pos_encoding(inputs)
expected = tf.constant(
[[[[[1.0000000, 1.0000000, 2.0000000]]],
@@ -92,6 +92,31 @@ def test_global_average_pool_basic(self):
self.assertEqual(outputs.shape, expected.shape)
self.assertAllEqual(outputs, expected)
+ def test_positional_encoding_stream(self):
+ pos_encoding = nn_layers.PositionalEncoding(
+ initializer='ones', cache_encoding=False)
+
+ inputs = tf.range(4, dtype=tf.float32) + 1.
+ inputs = tf.reshape(inputs, [1, 4, 1, 1, 1])
+ inputs = tf.tile(inputs, [1, 1, 1, 1, 3])
+ expected, _ = pos_encoding(inputs)
+
+ for num_splits in [1, 2, 4]:
+ frames = tf.split(inputs, num_splits, axis=1)
+ states = {}
+ predicted = []
+ for frame in frames:
+ output, states = pos_encoding(frame, states=states)
+ predicted.append(output)
+ predicted = tf.concat(predicted, axis=1)
+
+ self.assertEqual(predicted.shape, expected.shape)
+ self.assertAllClose(predicted, expected)
+ self.assertAllClose(predicted, [[[[[1.0000000, 1.0000000, 2.0000000]]],
+ [[[2.8414710, 2.0021544, 2.5403023]]],
+ [[[3.9092975, 3.0043090, 2.5838532]]],
+ [[[4.1411200, 4.0064630, 3.0100074]]]]])
+
def test_global_average_pool_keras(self):
pool = nn_layers.GlobalAveragePool3D(keepdims=False)
keras_pool = tf.keras.layers.GlobalAveragePooling3D()
diff --git a/official/vision/beta/modeling/maskrcnn_model.py b/official/vision/beta/modeling/maskrcnn_model.py
index e85d0e57547..2a18ccb3df9 100644
--- a/official/vision/beta/modeling/maskrcnn_model.py
+++ b/official/vision/beta/modeling/maskrcnn_model.py
@@ -140,10 +140,10 @@ def call(self,
images: tf.Tensor,
image_shape: tf.Tensor,
anchor_boxes: Optional[Mapping[str, tf.Tensor]] = None,
- gt_boxes: tf.Tensor = None,
- gt_classes: tf.Tensor = None,
- gt_masks: tf.Tensor = None,
- training: bool = None) -> Mapping[str, tf.Tensor]:
+ gt_boxes: Optional[tf.Tensor] = None,
+ gt_classes: Optional[tf.Tensor] = None,
+ gt_masks: Optional[tf.Tensor] = None,
+ training: Optional[bool] = None) -> Mapping[str, tf.Tensor]:
model_outputs = {}
# Feature extraction.
diff --git a/official/vision/beta/modeling/video_classification_model.py b/official/vision/beta/modeling/video_classification_model.py
index 34a2edeca0a..f65df6c228a 100644
--- a/official/vision/beta/modeling/video_classification_model.py
+++ b/official/vision/beta/modeling/video_classification_model.py
@@ -27,7 +27,7 @@ def __init__(
self,
backbone: tf.keras.Model,
num_classes: int,
- input_specs: Mapping[str, tf.keras.layers.InputSpec] = None,
+ input_specs: Optional[Mapping[str, tf.keras.layers.InputSpec]] = None,
dropout_rate: float = 0.0,
aggregate_endpoints: bool = False,
kernel_initializer: str = 'random_uniform',
diff --git a/official/vision/beta/projects/assemblenet/modeling/assemblenet.py b/official/vision/beta/projects/assemblenet/modeling/assemblenet.py
index ea6c2cef367..beb127bd258 100644
--- a/official/vision/beta/projects/assemblenet/modeling/assemblenet.py
+++ b/official/vision/beta/projects/assemblenet/modeling/assemblenet.py
@@ -411,7 +411,7 @@ class _ApplyEdgeWeight(layers.Layer):
def __init__(self,
weights_shape,
- index: int = None,
+ index: Optional[int] = None,
use_5d_mode: bool = False,
model_edge_weights: Optional[List[Any]] = None,
**kwargs):
@@ -471,7 +471,7 @@ def build(self, input_shape: tf.TensorShape):
def call(self,
inputs: List[tf.Tensor],
- training: bool = None) -> Mapping[Any, List[tf.Tensor]]:
+ training: Optional[bool] = None) -> Mapping[Any, List[tf.Tensor]]:
use_5d_mode = self._use_5d_mode
dtype = inputs[0].dtype
assert len(inputs) > 1
@@ -517,7 +517,7 @@ def call(self,
def multi_connection_fusion(inputs: List[tf.Tensor],
- index: int = None,
+ index: Optional[int] = None,
use_5d_mode: bool = False,
model_edge_weights: Optional[List[Any]] = None):
"""Do weighted summation of multiple different sized tensors.
@@ -893,7 +893,8 @@ def __init__(self,
num_classes,
num_frames: int,
model_structure: List[Any],
- input_specs: Mapping[str, tf.keras.layers.InputSpec] = None,
+ input_specs: Optional[Mapping[str,
+ tf.keras.layers.InputSpec]] = None,
max_pool_preditions: bool = False,
**kwargs):
if not input_specs:
@@ -1018,7 +1019,8 @@ def build_assemblenet_v1(
input_specs: tf.keras.layers.InputSpec,
backbone_config: hyperparams.Config,
norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model:
+ l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
+) -> tf.keras.Model:
"""Builds assemblenet backbone."""
del l2_regularizer
@@ -1058,7 +1060,7 @@ def build_assemblenet_model(
input_specs: tf.keras.layers.InputSpec,
model_config: cfg.AssembleNetModel,
num_classes: int,
- l2_regularizer: tf.keras.regularizers.Regularizer = None):
+ l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None):
"""Builds assemblenet model."""
input_specs_dict = {'image': input_specs}
backbone = build_assemblenet_v1(input_specs, model_config.backbone,
diff --git a/official/vision/beta/projects/movinet/README.md b/official/vision/beta/projects/movinet/README.md
index 804dd5491df..5ccf1d3e838 100644
--- a/official/vision/beta/projects/movinet/README.md
+++ b/official/vision/beta/projects/movinet/README.md
@@ -8,16 +8,27 @@ This repository is the official implementation of
[MoViNets: Mobile Video Networks for Efficient Video
Recognition](https://arxiv.org/abs/2103.11511).
+
+  +
+
+
## Description
Mobile Video Networks (MoViNets) are efficient video classification models
runnable on mobile devices. MoViNets demonstrate state-of-the-art accuracy and
efficiency on several large-scale video action recognition datasets.
+On [Kinetics 600](https://deepmind.com/research/open-source/kinetics),
+MoViNet-A6 achieves 84.8% top-1 accuracy, outperforming recent
+Vision Transformer models like [ViViT](https://arxiv.org/abs/2103.15691) (83.0%)
+and [VATT](https://arxiv.org/abs/2104.11178) (83.6%) without any additional
+training data, while using 10x fewer FLOPs. And streaming MoViNet-A0 achieves
+72% accuracy while using 3x fewer FLOPs than MobileNetV3-large (68%).
+
There is a large gap between video model performance of accurate models and
efficient models for video action recognition. On the one hand, 2D MobileNet
CNNs are fast and can operate on streaming video in real time, but are prone to
-be noisy and are inaccurate. On the other hand, 3D CNNs are accurate, but are
+be noisy and inaccurate. On the other hand, 3D CNNs are accurate, but are
memory and computation intensive and cannot operate on streaming video.
MoViNets bridge this gap, producing:
@@ -28,19 +39,22 @@ to A6).
usage.
- Temporal ensembles of models to boost efficiency even higher.
-Small MoViNets demonstrate higher efficiency and accuracy than MobileNetV3 for
-video action recognition (Kinetics 600).
+MoViNets also improve computational efficiency by outputting high-quality
+predictions frame by frame, as opposed to the traditional multi-clip evaluation
+approach that performs redundant computation and limits temporal scope.
-MoViNets also improve efficiency by outputting high-quality predictions with a
-single frame, as opposed to the traditional multi-clip evaluation approach.
+
+  +
+
-[](https://arxiv.org/pdf/2103.11511.pdf)
-
-[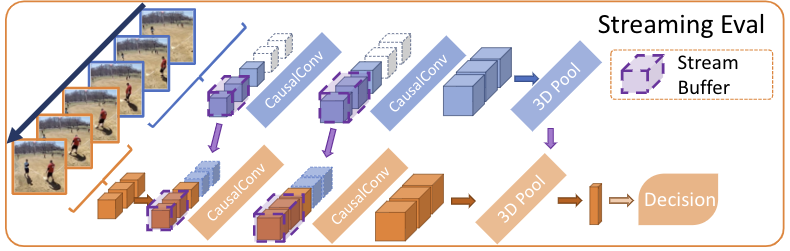](https://arxiv.org/pdf/2103.11511.pdf)
+
+  +
+
## History
-- Initial Commit.
+- **2021-05-30** Add streaming MoViNet checkpoints and examples.
+- **2021-05-11** Initial Commit.
## Authors and Maintainers
@@ -53,6 +67,7 @@ single frame, as opposed to the traditional multi-clip evaluation approach.
- [Requirements](#requirements)
- [Results and Pretrained Weights](#results-and-pretrained-weights)
- [Kinetics 600](#kinetics-600)
+- [Prediction Examples](#prediction-examples)
- [Training and Evaluation](#training-and-evaluation)
- [References](#references)
- [License](#license)
@@ -76,33 +91,154 @@ pip install -r requirements.txt
### Kinetics 600
-[](https://arxiv.org/pdf/2103.11511.pdf)
+
+  +
+
[tensorboard.dev summary](https://tensorboard.dev/experiment/Q07RQUlVRWOY4yDw3SnSkA/)
of training runs across all models.
-The table below summarizes the performance of each model and provides links to
-download pretrained models. All models are evaluated on single clips with the
-same resolution as training.
+The table below summarizes the performance of each model on
+[Kinetics 600](https://deepmind.com/research/open-source/kinetics)
+and provides links to download pretrained models. All models are evaluated on
+single clips with the same resolution as training.
+
+Note: MoViNet-A6 can be constructed as an ensemble of MoViNet-A4 and
+MoViNet-A5.
-Streaming MoViNets will be added in the future.
+#### Base Models
-| Model Name | Top-1 Accuracy | Top-5 Accuracy | GFLOPs\* | Checkpoint | TF Hub SavedModel |
-|------------|----------------|----------------|----------|------------|-------------------|
-| MoViNet-A0-Base | 71.41 | 90.91 | 2.7 | [checkpoint (12 MiB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a0_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a0/base/kinetics-600/classification/) |
-| MoViNet-A1-Base | 76.01 | 93.28 | 6.0 | [checkpoint (18 MiB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a1_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a1/base/kinetics-600/classification/) |
-| MoViNet-A2-Base | 78.03 | 93.99 | 10 | [checkpoint (20 MiB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a2_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a2/base/kinetics-600/classification/) |
-| MoViNet-A3-Base | 81.22 | 95.35 | 57 | [checkpoint (29 MiB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a3_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a3/base/kinetics-600/classification/) |
-| MoViNet-A4-Base | 82.96 | 95.98 | 110 | [checkpoint (44 MiB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a4_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a4/base/kinetics-600/classification/) |
-| MoViNet-A5-Base | 84.22 | 96.36 | 280 | [checkpoint (72 MiB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a5_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a5/base/kinetics-600/classification/) |
+Base models implement standard 3D convolutions without stream buffers.
+
+| Model Name | Top-1 Accuracy | Top-5 Accuracy | Input Shape | GFLOPs\* | Chekpoint | TF Hub SavedModel |
+|------------|----------------|----------------|-------------|----------|-----------|-------------------|
+| MoViNet-A0-Base | 72.28 | 90.92 | 50 x 172 x 172 | 2.7 | [checkpoint (12 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a0_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a0/base/kinetics-600/classification/) |
+| MoViNet-A1-Base | 76.69 | 93.40 | 50 x 172 x 172 | 6.0 | [checkpoint (18 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a1_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a1/base/kinetics-600/classification/) |
+| MoViNet-A2-Base | 78.62 | 94.17 | 50 x 224 x 224 | 10 | [checkpoint (20 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a2_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a2/base/kinetics-600/classification/) |
+| MoViNet-A3-Base | 81.79 | 95.67 | 120 x 256 x 256 | 57 | [checkpoint (29 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a3_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a3/base/kinetics-600/classification/) |
+| MoViNet-A4-Base | 83.48 | 96.16 | 80 x 290 x 290 | 110 | [checkpoint (44 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a4_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a4/base/kinetics-600/classification/) |
+| MoViNet-A5-Base | 84.27 | 96.39 | 120 x 320 x 320 | 280 | [checkpoint (72 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a5_base.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a5/base/kinetics-600/classification/) |
\*GFLOPs per video on Kinetics 600.
-## Training and Evaluation
+#### Streaming Models
+
+Streaming models implement causal 3D convolutions with stream buffers.
+
+| Model Name | Top-1 Accuracy | Top-5 Accuracy | Input Shape\* | GFLOPs\*\* | Chekpoint | TF Hub SavedModel |
+|------------|----------------|----------------|---------------|------------|-----------|-------------------|
+| MoViNet-A0-Stream | 72.05 | 90.63 | 50 x 172 x 172 | 2.7 | [checkpoint (12 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a0_stream.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a0/stream/kinetics-600/classification/) |
+| MoViNet-A1-Stream | 76.45 | 93.25 | 50 x 172 x 172 | 6.0 | [checkpoint (18 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a1_stream.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a1/stream/kinetics-600/classification/) |
+| MoViNet-A2-Stream | 78.40 | 94.05 | 50 x 224 x 224 | 10 | [checkpoint (20 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a2_stream.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a2/stream/kinetics-600/classification/) |
+| MoViNet-A3-Stream | 80.09 | 94.84 | 120 x 256 x 256 | 57 | [checkpoint (29 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a3_stream.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a3/stream/kinetics-600/classification/) |
+| MoViNet-A4-Stream | 81.49 | 95.66 | 80 x 290 x 290 | 110 | [checkpoint (44 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a4_stream.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a4/stream/kinetics-600/classification/) |
+| MoViNet-A5-Stream | 82.37 | 95.79 | 120 x 320 x 320 | 280 | [checkpoint (72 MB)](https://storage.googleapis.com/tf_model_garden/vision/movinet/movinet_a5_stream.tar.gz) | [tfhub](https://tfhub.dev/tensorflow/movinet/a5/stream/kinetics-600/classification/) |
+
+\*In streaming mode, the number of frames correspond to the total accumulated
+duration of the 10-second clip.
+
+\*\*GFLOPs per video on Kinetics 600.
+
+## Prediction Examples
Please check out our [Colab Notebook](https://colab.research.google.com/github/tensorflow/models/tree/master/official/vision/beta/projects/movinet/movinet_tutorial.ipynb)
to get started with MoViNets.
+This section provides examples on how to run prediction.
+
+For base models, run the following:
+
+```python
+import tensorflow as tf
+
+from official.vision.beta.projects.movinet.modeling import movinet
+from official.vision.beta.projects.movinet.modeling import movinet_model
+
+# Create backbone and model.
+backbone = movinet.Movinet(
+ model_id='a0',
+ causal=True,
+ use_external_states=True,
+)
+model = movinet_model.MovinetClassifier(
+ backbone, num_classes=600, output_states=True)
+
+# Create your example input here.
+# Refer to the paper for recommended input shapes.
+inputs = tf.ones([1, 8, 172, 172, 3])
+
+# [Optional] Build the model and load a pretrained checkpoint
+model.build(inputs.shape)
+
+checkpoint_dir = '/path/to/checkpoint'
+checkpoint_path = tf.train.latest_checkpoint(checkpoint_dir)
+checkpoint = tf.train.Checkpoint(model=model)
+status = checkpoint.restore(checkpoint_path)
+status.assert_existing_objects_matched()
+
+# Run the model prediction.
+output = model(inputs)
+prediction = tf.argmax(output, -1)
+```
+
+For streaming models, run the following:
+
+```python
+import tensorflow as tf
+
+from official.vision.beta.projects.movinet.modeling import movinet
+from official.vision.beta.projects.movinet.modeling import movinet_model
+
+# Create backbone and model.
+backbone = movinet.Movinet(
+ model_id='a0',
+ causal=True,
+ use_external_states=True,
+)
+model = movinet_model.MovinetClassifier(
+ backbone, num_classes=600, output_states=True)
+
+# Create your example input here.
+# Refer to the paper for recommended input shapes.
+inputs = tf.ones([1, 8, 172, 172, 3])
+
+# [Optional] Build the model and load a pretrained checkpoint
+model.build(inputs.shape)
+
+checkpoint_dir = '/path/to/checkpoint'
+checkpoint_path = tf.train.latest_checkpoint(checkpoint_dir)
+checkpoint = tf.train.Checkpoint(model=model)
+status = checkpoint.restore(checkpoint_path)
+status.assert_existing_objects_matched()
+
+# Split the video into individual frames.
+# Note: we can also split into larger clips as well (e.g., 8-frame clips).
+# Running on larger clips will slightly reduce latency overhead, but
+# will consume more memory.
+frames = tf.split(inputs, inputs.shape[1], axis=1)
+
+# Initialize the dict of states. All state tensors are initially zeros.
+init_states = model.init_states(tf.shape(inputs))
+
+# Run the model prediction by looping over each frame.
+states = init_states
+predictions = []
+for frame in frames:
+ output, states = model({**states, 'image': frame})
+ predictions.append(output)
+
+# The video classification will simply be the last output of the model.
+final_prediction = tf.argmax(predictions[-1], -1)
+
+# Alternatively, we can run the network on the entire input video.
+# The output should be effectively the same
+# (but it may differ a small amount due to floating point errors).
+non_streaming_output, _ = model({**init_states, 'image': inputs})
+non_streaming_prediction = tf.argmax(non_streaming_output, -1)
+```
+
+## Training and Evaluation
+
Run this command line for continuous training and evaluation.
```shell
@@ -137,11 +273,6 @@ python3 official/vision/beta/projects/movinet/train.py \
--tf_data_service=""
```
-## References
-
-- [Kinetics Datasets](https://deepmind.com/research/open-source/kinetics)
-- [MoViNets (Mobile Video Networks)](https://arxiv.org/abs/2103.11511)
-
## License
[](https://opensource.org/licenses/Apache-2.0)
diff --git a/official/vision/beta/projects/movinet/configs/movinet.py b/official/vision/beta/projects/movinet/configs/movinet.py
index 2ed59595b42..97cbef09036 100644
--- a/official/vision/beta/projects/movinet/configs/movinet.py
+++ b/official/vision/beta/projects/movinet/configs/movinet.py
@@ -45,6 +45,7 @@ class Movinet(hyperparams.Config):
# 3d_2plus1d: (2+1)D convolution with Conv3D (no 2D reshaping)
conv_type: str = '3d'
stochastic_depth_drop_rate: float = 0.2
+ use_external_states: bool = False
@dataclasses.dataclass
diff --git a/official/vision/beta/projects/movinet/configs/yaml/movinet_a5_stream_k600_8x8.yaml b/official/vision/beta/projects/movinet/configs/yaml/movinet_a5_stream_k600_8x8.yaml
new file mode 100644
index 00000000000..1983937679f
--- /dev/null
+++ b/official/vision/beta/projects/movinet/configs/yaml/movinet_a5_stream_k600_8x8.yaml
@@ -0,0 +1,75 @@
+# Video classification on Kinetics-600 using MoViNet-A5-Stream backbone.
+# --experiment_type=movinet_kinetics600
+# Achieves 82.37% Top-1 accuracy.
+# http://mldash/experiments/7675567202035803461
+
+runtime:
+ distribution_strategy: 'tpu'
+ mixed_precision_dtype: 'bfloat16'
+task:
+ losses:
+ l2_weight_decay: 0.00003
+ label_smoothing: 0.1
+ model:
+ backbone:
+ movinet:
+ model_id: 'a5'
+ causal: true
+ use_positional_encoding: true
+ stochastic_depth_drop_rate: 0.2
+ norm_activation:
+ use_sync_bn: true
+ dropout_rate: 0.5
+ train_data:
+ name: kinetics600
+ variant_name: rgb
+ feature_shape: !!python/tuple
+ - 32
+ - 320
+ - 320
+ - 3
+ temporal_stride: 2
+ random_stride_range: 1
+ global_batch_size: 1024
+ dtype: 'bfloat16'
+ shuffle_buffer_size: 1024
+ min_image_size: 368
+ aug_max_area_ratio: 1.0
+ aug_max_aspect_ratio: 2.0
+ aug_min_area_ratio: 0.08
+ aug_min_aspect_ratio: 0.5
+ aug_type: 'autoaug'
+ validation_data:
+ name: kinetics600
+ feature_shape: !!python/tuple
+ - 120
+ - 320
+ - 320
+ - 3
+ temporal_stride: 2
+ num_test_clips: 1
+ num_test_crops: 1
+ global_batch_size: 32
+ min_image_size: 368
+ dtype: 'bfloat16'
+ drop_remainder: false
+trainer:
+ optimizer_config:
+ learning_rate:
+ cosine:
+ initial_learning_rate: 1.8
+ decay_steps: 85785
+ warmup:
+ linear:
+ warmup_steps: 2145
+ optimizer:
+ type: 'rmsprop'
+ rmsprop:
+ rho: 0.9
+ momentum: 0.9
+ epsilon: 1.0
+ clipnorm: 1.0
+ train_steps: 85785
+ steps_per_loop: 500
+ summary_interval: 500
+ validation_interval: 500
diff --git a/official/vision/beta/projects/movinet/export_saved_model.py b/official/vision/beta/projects/movinet/export_saved_model.py
index 37ce66b2904..25c466727fb 100644
--- a/official/vision/beta/projects/movinet/export_saved_model.py
+++ b/official/vision/beta/projects/movinet/export_saved_model.py
@@ -19,38 +19,18 @@
```shell
python3 export_saved_model.py \
- --output_path=/tmp/movinet/ \
+ --export_path=/tmp/movinet/ \
--model_id=a0 \
--causal=True \
--conv_type="3d" \
--num_classes=600 \
+ --use_positional_encoding=False \
--checkpoint_path=""
```
-To use an exported saved_model in various applications:
-
-```python
-import tensorflow as tf
-import tensorflow_hub as hub
-
-saved_model_path = ...
-
-inputs = tf.keras.layers.Input(
- shape=[None, None, None, 3],
- dtype=tf.float32)
-
-encoder = hub.KerasLayer(saved_model_path, trainable=True)
-outputs = encoder(inputs)
-
-model = tf.keras.Model(inputs, outputs)
-
-example_input = tf.ones([1, 8, 172, 172, 3])
-outputs = model(example_input, states)
-```
+To use an exported saved_model, refer to export_saved_model_test.py.
"""
-from typing import Sequence
-
from absl import app
from absl import flags
import tensorflow as tf
@@ -59,8 +39,8 @@
from official.vision.beta.projects.movinet.modeling import movinet_model
flags.DEFINE_string(
- 'output_path', '/tmp/movinet/',
- 'Path to saved exported saved_model file.')
+ 'export_path', '/tmp/movinet/',
+ 'Export path to save the saved_model file.')
flags.DEFINE_string(
'model_id', 'a0', 'MoViNet model name.')
flags.DEFINE_bool(
@@ -73,8 +53,20 @@
'3x3 followed by 5x1 conv). 3d_2plus1d uses (2+1)D convolution with '
'Conv3D and no 2D reshaping (e.g., a 5x3x3 kernel becomes 1x3x3 '
'followed by 5x1x1 conv).')
+flags.DEFINE_bool(
+ 'use_positional_encoding', False,
+ 'Whether to use positional encoding (only applied when causal=True).')
flags.DEFINE_integer(
'num_classes', 600, 'The number of classes for prediction.')
+flags.DEFINE_integer(
+ 'batch_size', None,
+ 'The batch size of the input. Set to None for dynamic input.')
+flags.DEFINE_integer(
+ 'num_frames', None,
+ 'The number of frames of the input. Set to None for dynamic input.')
+flags.DEFINE_integer(
+ 'image_size', None,
+ 'The resolution of the input. Set to None for dynamic input.')
flags.DEFINE_string(
'checkpoint_path', '',
'Checkpoint path to load. Leave blank for default initialization.')
@@ -82,75 +74,79 @@
FLAGS = flags.FLAGS
-def main(argv: Sequence[str]) -> None:
- if len(argv) > 1:
- raise app.UsageError('Too many command-line arguments.')
+def main(_) -> None:
+ input_specs = tf.keras.layers.InputSpec(shape=[
+ FLAGS.batch_size,
+ FLAGS.num_frames,
+ FLAGS.image_size,
+ FLAGS.image_size,
+ 3,
+ ])
# Use dimensions of 1 except the channels to export faster,
# since we only really need the last dimension to build and get the output
# states. These dimensions will be set to `None` once the model is built.
- input_shape = [1, 1, 1, 1, 3]
+ input_shape = [1 if s is None else s for s in input_specs.shape]
backbone = movinet.Movinet(
- FLAGS.model_id, causal=FLAGS.causal, conv_type=FLAGS.conv_type)
+ FLAGS.model_id,
+ causal=FLAGS.causal,
+ conv_type=FLAGS.conv_type,
+ use_external_states=FLAGS.causal,
+ input_specs=input_specs,
+ use_positional_encoding=FLAGS.use_positional_encoding)
model = movinet_model.MovinetClassifier(
- backbone, num_classes=FLAGS.num_classes, output_states=FLAGS.causal)
+ backbone,
+ num_classes=FLAGS.num_classes,
+ output_states=FLAGS.causal,
+ input_specs=dict(image=input_specs))
model.build(input_shape)
+ # Compile model to generate some internal Keras variables.
+ model.compile()
+
if FLAGS.checkpoint_path:
- model.load_weights(FLAGS.checkpoint_path)
+ checkpoint = tf.train.Checkpoint(model=model)
+ status = checkpoint.restore(FLAGS.checkpoint_path)
+ status.assert_existing_objects_matched()
if FLAGS.causal:
# Call the model once to get the output states. Call again with `states`
# input to ensure that the inputs with the `states` argument is built
- _, states = model(dict(image=tf.ones(input_shape), states={}))
- _, states = model(dict(image=tf.ones(input_shape), states=states))
-
- input_spec = tf.TensorSpec(
- shape=[None, None, None, None, 3],
- dtype=tf.float32,
- name='inputs')
-
- state_specs = {}
- for name, state in states.items():
- shape = state.shape
- if len(state.shape) == 5:
- shape = [None, state.shape[1], None, None, state.shape[-1]]
- new_spec = tf.TensorSpec(shape=shape, dtype=state.dtype, name=name)
- state_specs[name] = new_spec
-
- specs = (input_spec, state_specs)
-
- # Define a tf.keras.Model with custom signatures to allow it to accept
- # a state dict as an argument. We define it inline here because
- # we first need to determine the shape of the state tensors before
- # applying the `input_signature` argument to `tf.function`.
- class ExportStateModule(tf.Module):
- """Module with state for exporting to saved_model."""
-
- def __init__(self, model):
- self.model = model
-
- @tf.function(input_signature=[input_spec])
- def __call__(self, inputs):
- return self.model(dict(image=inputs, states={}))
-
- @tf.function(input_signature=[input_spec])
- def base(self, inputs):
- return self.model(dict(image=inputs, states={}))
-
- @tf.function(input_signature=specs)
- def stream(self, inputs, states):
- return self.model(dict(image=inputs, states=states))
-
- module = ExportStateModule(model)
-
- tf.saved_model.save(module, FLAGS.output_path)
+ # with the full output state shapes.
+ input_image = tf.ones(input_shape)
+ _, states = model({**model.init_states(input_shape), 'image': input_image})
+ _, states = model({**states, 'image': input_image})
+
+ # Create a function to explicitly set the names of the outputs
+ def predict(inputs):
+ outputs, states = model(inputs)
+ return {**states, 'logits': outputs}
+
+ specs = {
+ name: tf.TensorSpec(spec.shape, name=name, dtype=spec.dtype)
+ for name, spec in model.initial_state_specs(
+ input_specs.shape).items()
+ }
+ specs['image'] = tf.TensorSpec(
+ input_specs.shape, dtype=model.dtype, name='image')
+
+ predict_fn = tf.function(predict, jit_compile=True)
+ predict_fn = predict_fn.get_concrete_function(specs)
+
+ init_states_fn = tf.function(model.init_states, jit_compile=True)
+ init_states_fn = init_states_fn.get_concrete_function(
+ tf.TensorSpec([5], dtype=tf.int32))
+
+ signatures = {'call': predict_fn, 'init_states': init_states_fn}
+
+ tf.keras.models.save_model(
+ model, FLAGS.export_path, signatures=signatures)
else:
_ = model(tf.ones(input_shape))
- tf.keras.models.save_model(model, FLAGS.output_path)
+ tf.keras.models.save_model(model, FLAGS.export_path)
- print(' ----- Done. Saved Model is saved at {}'.format(FLAGS.output_path))
+ print(' ----- Done. Saved Model is saved at {}'.format(FLAGS.export_path))
if __name__ == '__main__':
diff --git a/official/vision/beta/projects/movinet/export_saved_model_test.py b/official/vision/beta/projects/movinet/export_saved_model_test.py
new file mode 100644
index 00000000000..0f364fb697f
--- /dev/null
+++ b/official/vision/beta/projects/movinet/export_saved_model_test.py
@@ -0,0 +1,102 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+"""Tests for export_saved_model."""
+
+from absl import flags
+import tensorflow as tf
+import tensorflow_hub as hub
+
+from official.vision.beta.projects.movinet import export_saved_model
+
+FLAGS = flags.FLAGS
+
+
+class ExportSavedModelTest(tf.test.TestCase):
+
+ def test_movinet_export_a0_base_with_tfhub(self):
+ saved_model_path = self.get_temp_dir()
+
+ FLAGS.export_path = saved_model_path
+ FLAGS.model_id = 'a0'
+ FLAGS.causal = False
+ FLAGS.num_classes = 600
+
+ export_saved_model.main('unused_args')
+
+ encoder = hub.KerasLayer(saved_model_path, trainable=True)
+
+ inputs = tf.keras.layers.Input(
+ shape=[None, None, None, 3],
+ dtype=tf.float32)
+
+ outputs = encoder(dict(image=inputs))
+
+ model = tf.keras.Model(inputs, outputs)
+
+ example_input = tf.ones([1, 8, 172, 172, 3])
+ outputs = model(example_input)
+
+ self.assertEqual(outputs.shape, [1, 600])
+
+ def test_movinet_export_a0_stream_with_tfhub(self):
+ saved_model_path = self.get_temp_dir()
+
+ FLAGS.export_path = saved_model_path
+ FLAGS.model_id = 'a0'
+ FLAGS.causal = True
+ FLAGS.num_classes = 600
+
+ export_saved_model.main('unused_args')
+
+ encoder = hub.KerasLayer(saved_model_path, trainable=True)
+
+ image_input = tf.keras.layers.Input(
+ shape=[None, None, None, 3],
+ dtype=tf.float32,
+ name='image')
+
+ init_states_fn = encoder.resolved_object.signatures['init_states']
+ state_shapes = {
+ name: ([s if s > 0 else None for s in state.shape], state.dtype)
+ for name, state in init_states_fn(tf.constant([0, 0, 0, 0, 3])).items()
+ }
+ states_input = {
+ name: tf.keras.Input(shape[1:], dtype=dtype, name=name)
+ for name, (shape, dtype) in state_shapes.items()
+ }
+
+ inputs = {**states_input, 'image': image_input}
+
+ outputs = encoder(inputs)
+
+ model = tf.keras.Model(inputs, outputs)
+
+ example_input = tf.ones([1, 8, 172, 172, 3])
+ frames = tf.split(example_input, example_input.shape[1], axis=1)
+
+ init_states = init_states_fn(tf.shape(example_input))
+
+ expected_outputs, _ = model({**init_states, 'image': example_input})
+
+ states = init_states
+ for frame in frames:
+ outputs, states = model({**states, 'image': frame})
+
+ self.assertEqual(outputs.shape, [1, 600])
+ self.assertNotEmpty(states)
+ self.assertAllClose(outputs, expected_outputs, 1e-5, 1e-5)
+
+if __name__ == '__main__':
+ tf.test.main()
diff --git a/official/vision/beta/projects/movinet/modeling/movinet.py b/official/vision/beta/projects/movinet/modeling/movinet.py
index beb9e021022..131cb3455f9 100644
--- a/official/vision/beta/projects/movinet/modeling/movinet.py
+++ b/official/vision/beta/projects/movinet/modeling/movinet.py
@@ -17,7 +17,8 @@
Reference: https://arxiv.org/pdf/2103.11511.pdf
"""
-from typing import Optional, Sequence, Tuple
+import math
+from typing import Dict, Mapping, Optional, Sequence, Tuple, Union
import dataclasses
import tensorflow as tf
@@ -71,8 +72,6 @@ class HeadSpec(BlockSpec):
"""Configuration of a Movinet block."""
project_filters: int = 0
head_filters: int = 0
- output_per_frame: bool = False
- max_pool_predictions: bool = False
# Block specs specify the architecture of each model
@@ -317,6 +316,7 @@ def __init__(self,
kernel_regularizer: Optional[str] = None,
bias_regularizer: Optional[str] = None,
stochastic_depth_drop_rate: float = 0.,
+ use_external_states: bool = False,
**kwargs):
"""MoViNet initialization function.
@@ -344,6 +344,8 @@ def __init__(self,
bias_regularizer: tf.keras.regularizers.Regularizer object for Conv2d.
Defaults to None.
stochastic_depth_drop_rate: the base rate for stochastic depth.
+ use_external_states: if True, expects states to be passed as additional
+ input.
**kwargs: keyword arguments to be passed.
"""
block_specs = BLOCK_SPECS[model_id]
@@ -371,7 +373,10 @@ def __init__(self,
self._kernel_regularizer = kernel_regularizer
self._bias_regularizer = bias_regularizer
self._stochastic_depth_drop_rate = stochastic_depth_drop_rate
+ self._use_external_states = use_external_states
+ if self._use_external_states and not self._causal:
+ raise ValueError('External states should be used with causal mode.')
if not isinstance(block_specs[0], StemSpec):
raise ValueError(
'Expected first spec to be StemSpec, got {}'.format(block_specs[0]))
@@ -380,22 +385,55 @@ def __init__(self,
'Expected final spec to be HeadSpec, got {}'.format(block_specs[-1]))
self._head_filters = block_specs[-1].head_filters
- if tf.keras.backend.image_data_format() == 'channels_last':
- bn_axis = -1
- else:
- bn_axis = 1
+ state_specs = None
+ if use_external_states:
+ self._set_dtype_policy(input_specs.dtype)
+ state_specs = self.initial_state_specs(input_specs.shape)
- # Build MoViNet backbone.
- inputs = tf.keras.Input(shape=input_specs.shape[1:], name='inputs')
+ inputs, outputs = self._build_network(input_specs, state_specs=state_specs)
- x = inputs
- states = {}
+ super(Movinet, self).__init__(inputs=inputs, outputs=outputs, **kwargs)
+
+ self._state_specs = state_specs
+
+ def _build_network(
+ self,
+ input_specs: tf.keras.layers.InputSpec,
+ state_specs: Optional[Mapping[str, tf.keras.layers.InputSpec]] = None,
+ ) -> Tuple[Mapping[str, tf.keras.Input], Tuple[Mapping[str, tf.Tensor],
+ Mapping[str, tf.Tensor]]]:
+ """Builds the model network.
+
+ Args:
+ input_specs: the model input spec to use.
+ state_specs: a dict mapping a state name to the corresponding state spec.
+ State names should match with the `state` input/output dict.
+
+ Returns:
+ Inputs and outputs as a tuple. Inputs are expected to be a dict with
+ base input and states. Outputs are expected to be a dict of endpoints
+ and output states.
+ """
+ state_specs = state_specs if state_specs is not None else {}
+
+ image_input = tf.keras.Input(shape=input_specs.shape[1:], name='inputs')
+
+ states = {
+ name: tf.keras.Input(shape=spec.shape[1:], dtype=spec.dtype, name=name)
+ for name, spec in state_specs.items()
+ }
+
+ inputs = {**states, 'image': image_input}
endpoints = {}
- num_layers = sum(len(block.expand_filters) for block in block_specs
- if isinstance(block, MovinetBlockSpec))
+ x = image_input
+
+ num_layers = sum(
+ len(block.expand_filters)
+ for block in self._block_specs
+ if isinstance(block, MovinetBlockSpec))
stochastic_depth_idx = 1
- for block_idx, block in enumerate(block_specs):
+ for block_idx, block in enumerate(self._block_specs):
if isinstance(block, StemSpec):
x, states = movinet_layers.Stem(
block.filters,
@@ -404,12 +442,14 @@ def __init__(self,
conv_type=self._conv_type,
causal=self._causal,
activation=self._activation,
- kernel_initializer=kernel_initializer,
- kernel_regularizer=kernel_regularizer,
+ kernel_initializer=self._kernel_initializer,
+ kernel_regularizer=self._kernel_regularizer,
batch_norm_layer=self._norm,
batch_norm_momentum=self._norm_momentum,
batch_norm_epsilon=self._norm_epsilon,
- name='stem')(x, states=states)
+ state_prefix='state/stem',
+ name='stem')(
+ x, states=states)
endpoints['stem'] = x
elif isinstance(block, MovinetBlockSpec):
if not (len(block.expand_filters) == len(block.kernel_sizes) ==
@@ -437,14 +477,16 @@ def __init__(self,
activation=self._activation,
stochastic_depth_drop_rate=stochastic_depth_drop_rate,
conv_type=self._conv_type,
- use_positional_encoding=
- self._use_positional_encoding and self._causal,
- kernel_initializer=kernel_initializer,
- kernel_regularizer=kernel_regularizer,
+ use_positional_encoding=self._use_positional_encoding and
+ self._causal,
+ kernel_initializer=self._kernel_initializer,
+ kernel_regularizer=self._kernel_regularizer,
batch_norm_layer=self._norm,
batch_norm_momentum=self._norm_momentum,
batch_norm_epsilon=self._norm_epsilon,
- name=name)(x, states=states)
+ state_prefix=f'state/{name}',
+ name=name)(
+ x, states=states)
endpoints[name] = x
stochastic_depth_idx += 1
elif isinstance(block, HeadSpec):
@@ -452,27 +494,163 @@ def __init__(self,
project_filters=block.project_filters,
conv_type=self._conv_type,
activation=self._activation,
- kernel_initializer=kernel_initializer,
- kernel_regularizer=kernel_regularizer,
+ kernel_initializer=self._kernel_initializer,
+ kernel_regularizer=self._kernel_regularizer,
batch_norm_layer=self._norm,
batch_norm_momentum=self._norm_momentum,
- batch_norm_epsilon=self._norm_epsilon)(x, states=states)
+ batch_norm_epsilon=self._norm_epsilon,
+ state_prefix='state/head',
+ name='head')(
+ x, states=states)
endpoints['head'] = x
else:
raise ValueError('Unknown block type {}'.format(block))
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
+ outputs = (endpoints, states)
+
+ return inputs, outputs
+
+ def _get_initial_state_shapes(
+ self,
+ block_specs: Sequence[BlockSpec],
+ input_shape: Union[Sequence[int], tf.Tensor],
+ use_positional_encoding: bool = False) -> Dict[str, Sequence[int]]:
+ """Generates names and shapes for all input states.
+
+ Args:
+ block_specs: sequence of specs used for creating a model.
+ input_shape: the expected 5D shape of the image input.
+ use_positional_encoding: whether the model will use positional encoding.
- inputs = {
- 'image': inputs,
- 'states': {
- name: tf.keras.Input(shape=state.shape[1:], name=f'states/{name}')
- for name, state in states.items()
- },
+ Returns:
+ A dict mapping state names to state shapes.
+ """
+ def divide_resolution(shape, num_downsamples):
+ """Downsamples the dimension to calculate strided convolution shape."""
+ if shape is None:
+ return None
+ if isinstance(shape, tf.Tensor):
+ # Avoid using div and ceil to support tf lite
+ shape = tf.cast(shape, tf.float32)
+ resolution_divisor = 2 ** num_downsamples
+ resolution_multiplier = 0.5 ** num_downsamples
+ shape = ((shape + resolution_divisor - 1) * resolution_multiplier)
+ return tf.cast(shape, tf.int32)
+ else:
+ resolution_divisor = 2 ** num_downsamples
+ return math.ceil(shape / resolution_divisor)
+
+ states = {}
+ num_downsamples = 0
+
+ for block_idx, block in enumerate(block_specs):
+ if isinstance(block, StemSpec):
+ if block.kernel_size[0] > 1:
+ states['state/stem/stream_buffer'] = (
+ input_shape[0],
+ input_shape[1],
+ divide_resolution(input_shape[2], num_downsamples),
+ divide_resolution(input_shape[3], num_downsamples),
+ block.filters,
+ )
+ num_downsamples += 1
+ elif isinstance(block, MovinetBlockSpec):
+ block_idx -= 1
+ params = list(zip(
+ block.expand_filters,
+ block.kernel_sizes,
+ block.strides))
+ for layer_idx, layer in enumerate(params):
+ expand_filters, kernel_size, strides = layer
+
+ # If we use a 2D kernel, we apply spatial downsampling
+ # before the buffer.
+ if (tuple(strides[1:3]) != (1, 1) and
+ self._conv_type in ['2plus1d', '3d_2plus1d']):
+ num_downsamples += 1
+
+ if kernel_size[0] > 1:
+ states[f'state/b{block_idx}/l{layer_idx}/stream_buffer'] = (
+ input_shape[0],
+ kernel_size[0] - 1,
+ divide_resolution(input_shape[2], num_downsamples),
+ divide_resolution(input_shape[3], num_downsamples),
+ expand_filters,
+ )
+
+ states[f'state/b{block_idx}/l{layer_idx}/pool_buffer'] = (
+ input_shape[0], 1, 1, 1, expand_filters,
+ )
+ states[f'state/b{block_idx}/l{layer_idx}/pool_frame_count'] = (1,)
+
+ if use_positional_encoding:
+ name = f'state/b{block_idx}/l{layer_idx}/pos_enc_frame_count'
+ states[name] = (1,)
+
+ if strides[1] != strides[2]:
+ raise ValueError('Strides must match in the spatial dimensions, '
+ 'got {}'.format(strides))
+
+ # If we use a 3D kernel, we apply spatial downsampling
+ # after the buffer.
+ if (tuple(strides[1:3]) != (1, 1) and
+ self._conv_type not in ['2plus1d', '3d_2plus1d']):
+ num_downsamples += 1
+ elif isinstance(block, HeadSpec):
+ states['state/head/pool_buffer'] = (
+ input_shape[0], 1, 1, 1, block.project_filters,
+ )
+ states['state/head/pool_frame_count'] = (1,)
+
+ return states
+
+ def _get_state_dtype(self, name: str) -> str:
+ """Returns the dtype associated with a state."""
+ if 'frame_count' in name:
+ return 'int32'
+ return self.dtype
+
+ def initial_state_specs(
+ self, input_shape: Sequence[int]) -> Dict[str, tf.keras.layers.InputSpec]:
+ """Creates a mapping of state name to InputSpec from the input shape."""
+ state_shapes = self._get_initial_state_shapes(
+ self._block_specs,
+ input_shape,
+ use_positional_encoding=self._use_positional_encoding)
+
+ return {
+ name: tf.keras.layers.InputSpec(
+ shape=shape, dtype=self._get_state_dtype(name))
+ for name, shape in state_shapes.items()
}
- outputs = (endpoints, states)
- super(Movinet, self).__init__(inputs=inputs, outputs=outputs, **kwargs)
+ def init_states(self, input_shape: Sequence[int]) -> Dict[str, tf.Tensor]:
+ """Returns initial states for the first call in steaming mode."""
+ state_shapes = self._get_initial_state_shapes(
+ self._block_specs,
+ input_shape,
+ use_positional_encoding=self._use_positional_encoding)
+
+ states = {
+ name: tf.zeros(shape, dtype=self._get_state_dtype(name))
+ for name, shape in state_shapes.items()
+ }
+ return states
+
+ @property
+ def use_external_states(self) -> bool:
+ """Whether this model is expecting input states as additional input."""
+ return self._use_external_states
+
+ @property
+ def head_filters(self):
+ """The number of filters expected to be in the head classifer layer."""
+ return self._head_filters
+
+ @property
+ def conv_type(self):
+ """The expected convolution type (see __init__ for more details)."""
+ return self._conv_type
def get_config(self):
config_dict = {
@@ -495,11 +673,6 @@ def get_config(self):
def from_config(cls, config, custom_objects=None):
return cls(**config)
- @property
- def output_specs(self):
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
@factory.register_backbone_builder('movinet')
def build_movinet(
@@ -508,8 +681,6 @@ def build_movinet(
norm_activation_config: hyperparams.Config,
l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model:
"""Builds MoViNet backbone from a config."""
- l2_regularizer = l2_regularizer or tf.keras.regularizers.L2(1.5e-5)
-
backbone_type = backbone_config.type
backbone_cfg = backbone_config.get()
assert backbone_type == 'movinet', ('Inconsistent backbone type '
@@ -526,4 +697,5 @@ def build_movinet(
norm_momentum=norm_activation_config.norm_momentum,
norm_epsilon=norm_activation_config.norm_epsilon,
kernel_regularizer=l2_regularizer,
- stochastic_depth_drop_rate=backbone_cfg.stochastic_depth_drop_rate)
+ stochastic_depth_drop_rate=backbone_cfg.stochastic_depth_drop_rate,
+ use_external_states=backbone_cfg.use_external_states)
diff --git a/official/vision/beta/projects/movinet/modeling/movinet_layers.py b/official/vision/beta/projects/movinet/modeling/movinet_layers.py
index 171660754d2..369655ce290 100644
--- a/official/vision/beta/projects/movinet/modeling/movinet_layers.py
+++ b/official/vision/beta/projects/movinet/modeling/movinet_layers.py
@@ -18,7 +18,7 @@
Reference: https://arxiv.org/pdf/2103.11511.pdf
"""
-from typing import Any, Optional, Sequence, Tuple, Union, Dict
+from typing import Any, Mapping, Optional, Sequence, Tuple, Union
import tensorflow as tf
@@ -270,7 +270,6 @@ def __init__(
batch_norm_epsilon: float = 1e-3,
activation: Optional[Any] = None,
conv_type: str = '3d',
- use_positional_encoding: bool = False,
use_buffered_input: bool = False,
**kwargs):
"""Initializes a conv block.
@@ -293,9 +292,6 @@ def __init__(
ops. '2plus1d' split any 3D ops into two sequential 2D ops with their
own batch norm and activation. '3d_2plus1d' is like '2plus1d', but
uses two sequential 3D ops instead.
- use_positional_encoding: add a positional encoding before the temporal
- convolution. Assumes `kernel_size[0] > 1`. Otherwise, this argument
- is ignored.
use_buffered_input: if True, the input is expected to be padded
beforehand. In effect, calling this layer will use 'valid' padding on
the temporal dimension to simulate 'causal' padding.
@@ -324,7 +320,6 @@ def __init__(
self._batch_norm_epsilon = batch_norm_epsilon
self._activation = activation
self._conv_type = conv_type
- self._use_positional_encoding = use_positional_encoding
self._use_buffered_input = use_buffered_input
if activation is not None:
@@ -350,7 +345,6 @@ def get_config(self):
'batch_norm_epsilon': self._batch_norm_epsilon,
'activation': self._activation,
'conv_type': self._conv_type,
- 'use_positional_encoding': self._use_positional_encoding,
'use_buffered_input': self._use_buffered_input,
}
base_config = super(ConvBlock, self).get_config()
@@ -426,11 +420,6 @@ def build(self, input_shape):
use_buffered_input=self._use_buffered_input,
name='conv3d')
- if self._use_positional_encoding and self._kernel_size[0] > 1:
- self._pos_encoding = nn_layers.PositionalEncoding()
- else:
- self._pos_encoding = None
-
self._batch_norm = None
self._batch_norm_temporal = None
@@ -451,9 +440,6 @@ def call(self, inputs):
"""Calls the layer with the given inputs."""
x = inputs
- if self._pos_encoding is not None and self._conv_temporal is None:
- x = self._pos_encoding(x)
-
x = self._conv(x)
if self._batch_norm is not None:
x = self._batch_norm(x)
@@ -461,9 +447,6 @@ def call(self, inputs):
x = self._activation_layer(x)
if self._conv_temporal is not None:
- if self._pos_encoding is not None:
- x = self._pos_encoding(x)
-
x = self._conv_temporal(x)
if self._batch_norm_temporal is not None:
x = self._batch_norm_temporal(x)
@@ -477,11 +460,15 @@ def call(self, inputs):
class StreamBuffer(tf.keras.layers.Layer):
"""Stream buffer wrapper which caches activations of previous frames."""
- def __init__(self, buffer_size: int, **kwargs):
+ def __init__(self,
+ buffer_size: int,
+ state_prefix: Optional[str] = None,
+ **kwargs):
"""Initializes a stream buffer.
Args:
buffer_size: the number of input frames to cache.
+ state_prefix: a prefix string to identify states.
**kwargs: keyword arguments to be passed to this layer.
Returns:
@@ -489,36 +476,32 @@ def __init__(self, buffer_size: int, **kwargs):
"""
super(StreamBuffer, self).__init__(**kwargs)
+ state_prefix = state_prefix if state_prefix is not None else ''
+ self._state_prefix = state_prefix
+ self._state_name = f'{state_prefix}/stream_buffer'
self._buffer_size = buffer_size
- def build(self, input_shape):
- """Builds the layer with the given input shape."""
- # Here we define strings that will uniquely reference the buffer states
- # in the TF graph. These will be used for passing in a mapping of states
- # for streaming mode. To do this, we can use a name scope.
- with tf.name_scope('buffer') as state_name:
- self._state_name = state_name
-
- super(StreamBuffer, self).build(input_shape)
-
def get_config(self):
"""Returns a dictionary containing the config used for initialization."""
config = {
'buffer_size': self._buffer_size,
+ 'state_prefix': self._state_prefix,
}
base_config = super(StreamBuffer, self).get_config()
return dict(list(base_config.items()) + list(config.items()))
- def call(self,
- inputs: tf.Tensor,
- states: Optional[nn_layers.States] = None
- ) -> Tuple[Any, nn_layers.States]:
+ def call(
+ self,
+ inputs: tf.Tensor,
+ states: Optional[nn_layers.States] = None,
+ ) -> Tuple[Any, nn_layers.States]:
"""Calls the layer with the given inputs.
Args:
inputs: the input tensor.
states: a dict of states such that, if any of the keys match for this
layer, will overwrite the contents of the buffer(s).
+ Expected keys include `state_prefix + '/stream_buffer'`.
Returns:
the output tensor and states
@@ -526,12 +509,16 @@ def call(self,
states = dict(states) if states is not None else {}
buffer = states.get(self._state_name, None)
- # `tf.pad` has limited support for tf lite, so use tf.concat instead
+ # Create the buffer if it does not exist in the states.
+ # Output buffer shape:
+ # [batch_size, buffer_size, input_height, input_width, num_channels]
if buffer is None:
shape = tf.shape(inputs)
buffer = tf.zeros(
[shape[0], self._buffer_size, shape[2], shape[3], shape[4]],
dtype=inputs.dtype)
+
+ # tf.pad has limited support for tf lite, so use tf.concat instead.
full_inputs = tf.concat([buffer, inputs], axis=1)
# Cache the last b frames of the input where b is the buffer size and f
@@ -557,16 +544,16 @@ def __init__(
causal: bool = False,
use_bias: bool = False,
kernel_initializer: tf.keras.initializers.Initializer = 'HeNormal',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] =
- tf.keras.regularizers.L2(KERNEL_WEIGHT_DECAY),
+ kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = tf.keras
+ .regularizers.L2(KERNEL_WEIGHT_DECAY),
use_batch_norm: bool = True,
- batch_norm_layer: tf.keras.layers.Layer =
- tf.keras.layers.experimental.SyncBatchNormalization,
+ batch_norm_layer: tf.keras.layers.Layer = tf.keras.layers.experimental
+ .SyncBatchNormalization,
batch_norm_momentum: float = 0.99,
batch_norm_epsilon: float = 1e-3,
activation: Optional[Any] = None,
conv_type: str = '3d',
- use_positional_encoding: bool = False,
+ state_prefix: Optional[str] = None,
**kwargs):
"""Initializes a stream conv block.
@@ -588,7 +575,7 @@ def __init__(
ops. '2plus1d' split any 3D ops into two sequential 2D ops with their
own batch norm and activation. '3d_2plus1d' is like '2plus1d', but
uses two sequential 3D ops instead.
- use_positional_encoding: add a positional encoding before the convolution.
+ state_prefix: a prefix string to identify states.
**kwargs: keyword arguments to be passed to this layer.
Returns:
@@ -598,6 +585,8 @@ def __init__(
buffer_size = kernel_size[0] - 1
use_buffer = buffer_size > 0 and causal
+ self._state_prefix = state_prefix
+
super(StreamConvBlock, self).__init__(
filters,
kernel_size,
@@ -613,18 +602,17 @@ def __init__(
batch_norm_epsilon=batch_norm_epsilon,
activation=activation,
conv_type=conv_type,
- use_positional_encoding=use_positional_encoding,
use_buffered_input=use_buffer,
**kwargs)
self._stream_buffer = None
if use_buffer:
self._stream_buffer = StreamBuffer(
- buffer_size=buffer_size)
+ buffer_size=buffer_size, state_prefix=state_prefix)
def get_config(self):
"""Returns a dictionary containing the config used for initialization."""
- config = {}
+ config = {'state_prefix': self._state_prefix}
base_config = super(StreamConvBlock, self).get_config()
return dict(list(base_config.items()) + list(config.items()))
@@ -645,9 +633,28 @@ def call(self,
states = dict(states) if states is not None else {}
x = inputs
- if self._stream_buffer is not None:
+
+ # If we have no separate temporal conv, use the buffer before the 3D conv.
+ if self._conv_temporal is None and self._stream_buffer is not None:
x, states = self._stream_buffer(x, states=states)
- x = super(StreamConvBlock, self).call(x)
+
+ x = self._conv(x)
+ if self._batch_norm is not None:
+ x = self._batch_norm(x)
+ if self._activation_layer is not None:
+ x = self._activation_layer(x)
+
+ if self._conv_temporal is not None:
+ if self._stream_buffer is not None:
+ # If we have a separate temporal conv, use the buffer before the
+ # 1D conv instead (otherwise, we may waste computation on the 2D conv).
+ x, states = self._stream_buffer(x, states=states)
+
+ x = self._conv_temporal(x)
+ if self._batch_norm_temporal is not None:
+ x = self._batch_norm_temporal(x)
+ if self._activation_layer is not None:
+ x = self._activation_layer(x)
return x, states
@@ -667,9 +674,10 @@ def __init__(
causal: bool = False,
conv_type: str = '3d',
kernel_initializer: tf.keras.initializers.Initializer = 'HeNormal',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] =
- tf.keras.regularizers.L2(KERNEL_WEIGHT_DECAY),
+ kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = tf.keras
+ .regularizers.L2(KERNEL_WEIGHT_DECAY),
use_positional_encoding: bool = False,
+ state_prefix: Optional[str] = None,
**kwargs):
"""Implementation for squeeze and excitation.
@@ -686,6 +694,7 @@ def __init__(
kernel_regularizer: kernel regularizer for the conv operation.
use_positional_encoding: add a positional encoding after the (cumulative)
global average pooling layer.
+ state_prefix: a prefix string to identify states.
**kwargs: keyword arguments to be passed to this layer.
"""
super(StreamSqueezeExcitation, self).__init__(**kwargs)
@@ -698,13 +707,15 @@ def __init__(
self._kernel_initializer = kernel_initializer
self._kernel_regularizer = kernel_regularizer
self._use_positional_encoding = use_positional_encoding
+ self._state_prefix = state_prefix
- self._pool = nn_layers.GlobalAveragePool3D(keepdims=True, causal=causal)
+ self._pool = nn_layers.GlobalAveragePool3D(
+ keepdims=True, causal=causal, state_prefix=state_prefix)
+ self._pos_encoding = None
if use_positional_encoding:
- self._pos_encoding = nn_layers.PositionalEncoding()
- else:
- self._pos_encoding = None
+ self._pos_encoding = nn_layers.PositionalEncoding(
+ initializer='zeros', state_prefix=state_prefix)
def get_config(self):
"""Returns a dictionary containing the config used for initialization."""
@@ -717,6 +728,7 @@ def get_config(self):
'kernel_initializer': self._kernel_initializer,
'kernel_regularizer': self._kernel_regularizer,
'use_positional_encoding': self._use_positional_encoding,
+ 'state_prefix': self._state_prefix,
}
base_config = super(StreamSqueezeExcitation, self).get_config()
return dict(list(base_config.items()) + list(config.items()))
@@ -768,7 +780,7 @@ def call(self,
x, states = self._pool(inputs, states=states)
if self._pos_encoding is not None:
- x = self._pos_encoding(x)
+ x, states = self._pos_encoding(x, states=states)
x = self._se_reduce(x)
x = self._se_expand(x)
@@ -992,12 +1004,13 @@ def __init__(
conv_type: str = '3d',
use_positional_encoding: bool = False,
kernel_initializer: tf.keras.initializers.Initializer = 'HeNormal',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] =
- tf.keras.regularizers.L2(KERNEL_WEIGHT_DECAY),
- batch_norm_layer: tf.keras.layers.Layer =
- tf.keras.layers.experimental.SyncBatchNormalization,
+ kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = tf.keras
+ .regularizers.L2(KERNEL_WEIGHT_DECAY),
+ batch_norm_layer: tf.keras.layers.Layer = tf.keras.layers.experimental
+ .SyncBatchNormalization,
batch_norm_momentum: float = 0.99,
batch_norm_epsilon: float = 1e-3,
+ state_prefix: Optional[str] = None,
**kwargs):
"""Implementation for MoViNet block.
@@ -1021,6 +1034,7 @@ def __init__(
batch_norm_layer: class to use for batch norm.
batch_norm_momentum: momentum of the batch norm operation.
batch_norm_epsilon: epsilon of the batch norm operation.
+ state_prefix: a prefix string to identify states.
**kwargs: keyword arguments to be passed to this layer.
"""
super(MovinetBlock, self).__init__(**kwargs)
@@ -1045,6 +1059,7 @@ def __init__(
self._batch_norm_layer = batch_norm_layer
self._batch_norm_momentum = batch_norm_momentum
self._batch_norm_epsilon = batch_norm_epsilon
+ self._state_prefix = state_prefix
self._expansion = ConvBlock(
expand_filters,
@@ -1066,15 +1081,14 @@ def __init__(
causal=self._causal,
activation=activation,
conv_type=conv_type,
- use_positional_encoding=use_positional_encoding,
kernel_initializer=kernel_initializer,
kernel_regularizer=kernel_regularizer,
use_batch_norm=True,
batch_norm_layer=self._batch_norm_layer,
batch_norm_momentum=self._batch_norm_momentum,
batch_norm_epsilon=self._batch_norm_epsilon,
+ state_prefix=state_prefix,
name='feature')
-
self._projection = ConvBlock(
out_filters,
(1, 1, 1),
@@ -1095,6 +1109,7 @@ def __init__(
use_positional_encoding=use_positional_encoding,
kernel_initializer=kernel_initializer,
kernel_regularizer=kernel_regularizer,
+ state_prefix=state_prefix,
name='se')
def get_config(self):
@@ -1114,6 +1129,7 @@ def get_config(self):
'kernel_regularizer': self._kernel_regularizer,
'batch_norm_momentum': self._batch_norm_momentum,
'batch_norm_epsilon': self._batch_norm_epsilon,
+ 'state_prefix': self._state_prefix,
}
base_config = super(MovinetBlock, self).get_config()
return dict(list(base_config.items()) + list(config.items()))
@@ -1176,12 +1192,13 @@ def __init__(
conv_type: str = '3d',
activation: nn_layers.Activation = 'swish',
kernel_initializer: tf.keras.initializers.Initializer = 'HeNormal',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] =
- tf.keras.regularizers.L2(KERNEL_WEIGHT_DECAY),
- batch_norm_layer: tf.keras.layers.Layer =
- tf.keras.layers.experimental.SyncBatchNormalization,
+ kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = tf.keras
+ .regularizers.L2(KERNEL_WEIGHT_DECAY),
+ batch_norm_layer: tf.keras.layers.Layer = tf.keras.layers.experimental
+ .SyncBatchNormalization,
batch_norm_momentum: float = 0.99,
batch_norm_epsilon: float = 1e-3,
+ state_prefix: Optional[str] = None,
**kwargs):
"""Implementation for video model stem.
@@ -1200,35 +1217,38 @@ def __init__(
batch_norm_layer: class to use for batch norm.
batch_norm_momentum: momentum of the batch norm operation.
batch_norm_epsilon: epsilon of the batch norm operation.
+ state_prefix: a prefix string to identify states.
**kwargs: keyword arguments to be passed to this layer.
"""
super(Stem, self).__init__(**kwargs)
+ self._out_filters = out_filters
self._kernel_size = normalize_tuple(kernel_size, 3, 'kernel_size')
self._strides = normalize_tuple(strides, 3, 'strides')
-
- self._out_filters = out_filters
- self._conv_type = conv_type
self._causal = causal
+ self._conv_type = conv_type
+ self._activation = activation
self._kernel_initializer = kernel_initializer
self._kernel_regularizer = kernel_regularizer
self._batch_norm_layer = batch_norm_layer
self._batch_norm_momentum = batch_norm_momentum
self._batch_norm_epsilon = batch_norm_epsilon
+ self._state_prefix = state_prefix
self._stem = StreamConvBlock(
filters=self._out_filters,
kernel_size=self._kernel_size,
strides=self._strides,
causal=self._causal,
- activation=activation,
+ activation=self._activation,
conv_type=self._conv_type,
- kernel_initializer=kernel_initializer,
- kernel_regularizer=kernel_regularizer,
+ kernel_initializer=self._kernel_initializer,
+ kernel_regularizer=self._kernel_regularizer,
use_batch_norm=True,
batch_norm_layer=self._batch_norm_layer,
batch_norm_momentum=self._batch_norm_momentum,
batch_norm_epsilon=self._batch_norm_epsilon,
+ state_prefix=self._state_prefix,
name='stem')
def get_config(self):
@@ -1238,11 +1258,13 @@ def get_config(self):
'kernel_size': self._kernel_size,
'strides': self._strides,
'causal': self._causal,
+ 'activation': self._activation,
'conv_type': self._conv_type,
'kernel_initializer': self._kernel_initializer,
'kernel_regularizer': self._kernel_regularizer,
'batch_norm_momentum': self._batch_norm_momentum,
'batch_norm_epsilon': self._batch_norm_epsilon,
+ 'state_prefix': self._state_prefix,
}
base_config = super(Stem, self).get_config()
return dict(list(base_config.items()) + list(config.items()))
@@ -1278,12 +1300,13 @@ def __init__(
conv_type: str = '3d',
activation: nn_layers.Activation = 'swish',
kernel_initializer: tf.keras.initializers.Initializer = 'HeNormal',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] =
- tf.keras.regularizers.L2(KERNEL_WEIGHT_DECAY),
- batch_norm_layer: tf.keras.layers.Layer =
- tf.keras.layers.experimental.SyncBatchNormalization,
+ kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = tf.keras
+ .regularizers.L2(KERNEL_WEIGHT_DECAY),
+ batch_norm_layer: tf.keras.layers.Layer = tf.keras.layers.experimental
+ .SyncBatchNormalization,
batch_norm_momentum: float = 0.99,
batch_norm_epsilon: float = 1e-3,
+ state_prefix: Optional[str] = None,
**kwargs):
"""Implementation for video model head.
@@ -1299,17 +1322,20 @@ def __init__(
batch_norm_layer: class to use for batch norm.
batch_norm_momentum: momentum of the batch norm operation.
batch_norm_epsilon: epsilon of the batch norm operation.
+ state_prefix: a prefix string to identify states.
**kwargs: keyword arguments to be passed to this layer.
"""
super(Head, self).__init__(**kwargs)
self._project_filters = project_filters
self._conv_type = conv_type
+ self._activation = activation
self._kernel_initializer = kernel_initializer
self._kernel_regularizer = kernel_regularizer
self._batch_norm_layer = batch_norm_layer
self._batch_norm_momentum = batch_norm_momentum
self._batch_norm_epsilon = batch_norm_epsilon
+ self._state_prefix = state_prefix
self._project = ConvBlock(
filters=project_filters,
@@ -1322,25 +1348,29 @@ def __init__(
batch_norm_momentum=self._batch_norm_momentum,
batch_norm_epsilon=self._batch_norm_epsilon,
name='project')
- self._pool = nn_layers.GlobalAveragePool3D(keepdims=True, causal=False)
+ self._pool = nn_layers.GlobalAveragePool3D(
+ keepdims=True, causal=False, state_prefix=state_prefix)
def get_config(self):
"""Returns a dictionary containing the config used for initialization."""
config = {
'project_filters': self._project_filters,
'conv_type': self._conv_type,
+ 'activation': self._activation,
'kernel_initializer': self._kernel_initializer,
'kernel_regularizer': self._kernel_regularizer,
'batch_norm_momentum': self._batch_norm_momentum,
'batch_norm_epsilon': self._batch_norm_epsilon,
+ 'state_prefix': self._state_prefix,
}
base_config = super(Head, self).get_config()
return dict(list(base_config.items()) + list(config.items()))
- def call(self,
- inputs: Union[tf.Tensor, Dict[str, tf.Tensor]],
- states: Optional[nn_layers.States] = None,
- ) -> Tuple[tf.Tensor, nn_layers.States]:
+ def call(
+ self,
+ inputs: Union[tf.Tensor, Mapping[str, tf.Tensor]],
+ states: Optional[nn_layers.States] = None,
+ ) -> Tuple[tf.Tensor, nn_layers.States]:
"""Calls the layer with the given inputs.
Args:
diff --git a/official/vision/beta/projects/movinet/modeling/movinet_layers_test.py b/official/vision/beta/projects/movinet/modeling/movinet_layers_test.py
index 4095966fcd8..bb804f38d61 100644
--- a/official/vision/beta/projects/movinet/modeling/movinet_layers_test.py
+++ b/official/vision/beta/projects/movinet/modeling/movinet_layers_test.py
@@ -146,7 +146,6 @@ def test_stream_conv_block_2plus1d(self):
use_bias=False,
activation='relu',
conv_type='2plus1d',
- use_positional_encoding=True,
)
stream_conv_block = movinet_layers.StreamConvBlock(
@@ -158,7 +157,6 @@ def test_stream_conv_block_2plus1d(self):
use_bias=False,
activation='relu',
conv_type='2plus1d',
- use_positional_encoding=True,
)
inputs = tf.ones([1, 4, 2, 2, 3])
@@ -197,7 +195,6 @@ def test_stream_conv_block_3d_2plus1d(self):
use_bias=False,
activation='relu',
conv_type='3d_2plus1d',
- use_positional_encoding=True,
)
stream_conv_block = movinet_layers.StreamConvBlock(
@@ -209,7 +206,6 @@ def test_stream_conv_block_3d_2plus1d(self):
use_bias=False,
activation='relu',
conv_type='3d_2plus1d',
- use_positional_encoding=True,
)
inputs = tf.ones([1, 4, 2, 2, 3])
diff --git a/official/vision/beta/projects/movinet/modeling/movinet_model.py b/official/vision/beta/projects/movinet/modeling/movinet_model.py
index 552880a8b77..a1970e67b5a 100644
--- a/official/vision/beta/projects/movinet/modeling/movinet_model.py
+++ b/official/vision/beta/projects/movinet/modeling/movinet_model.py
@@ -16,7 +16,7 @@
Reference: https://arxiv.org/pdf/2103.11511.pdf
"""
-from typing import Mapping
+from typing import Any, Dict, Mapping, Optional, Sequence, Tuple, Union
from absl import logging
import tensorflow as tf
@@ -31,16 +31,17 @@
class MovinetClassifier(tf.keras.Model):
"""A video classification class builder."""
- def __init__(self,
- backbone: tf.keras.Model,
- num_classes: int,
- input_specs: Mapping[str, tf.keras.layers.InputSpec] = None,
- dropout_rate: float = 0.0,
- kernel_initializer: str = 'HeNormal',
- kernel_regularizer: tf.keras.regularizers.Regularizer = None,
- bias_regularizer: tf.keras.regularizers.Regularizer = None,
- output_states: bool = False,
- **kwargs):
+ def __init__(
+ self,
+ backbone: tf.keras.Model,
+ num_classes: int,
+ input_specs: Optional[Mapping[str, tf.keras.layers.InputSpec]] = None,
+ dropout_rate: float = 0.0,
+ kernel_initializer: str = 'HeNormal',
+ kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
+ bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
+ output_states: bool = False,
+ **kwargs):
"""Movinet initialization function.
Args:
@@ -70,47 +71,110 @@ def __init__(self,
self._bias_regularizer = bias_regularizer
self._output_states = output_states
- # Keras model variable that excludes @property.setters from tracking
- self._self_setattr_tracking = False
+ state_specs = None
+ if backbone.use_external_states:
+ state_specs = backbone.initial_state_specs(
+ input_shape=input_specs['image'].shape)
- inputs = {
- name: tf.keras.Input(shape=state.shape[1:], name=f'states/{name}')
- for name, state in input_specs.items()
+ inputs, outputs = self._build_network(
+ backbone, input_specs, state_specs=state_specs)
+
+ super(MovinetClassifier, self).__init__(
+ inputs=inputs, outputs=outputs, **kwargs)
+
+ # Move backbone after super() call so Keras is happy
+ self._backbone = backbone
+
+ def _build_network(
+ self,
+ backbone: tf.keras.Model,
+ input_specs: Mapping[str, tf.keras.layers.InputSpec],
+ state_specs: Optional[Mapping[str, tf.keras.layers.InputSpec]] = None,
+ ) -> Tuple[Mapping[str, tf.keras.Input], Union[Tuple[Mapping[
+ str, tf.Tensor], Mapping[str, tf.Tensor]], Mapping[str, tf.Tensor]]]:
+ """Builds the model network.
+
+ Args:
+ backbone: the model backbone.
+ input_specs: the model input spec to use.
+ state_specs: a dict of states such that, if any of the keys match for a
+ layer, will overwrite the contents of the buffer(s).
+
+ Returns:
+ Inputs and outputs as a tuple. Inputs are expected to be a dict with
+ base input and states. Outputs are expected to be a dict of endpoints
+ and (optionally) output states.
+ """
+ state_specs = state_specs if state_specs is not None else {}
+
+ states = {
+ name: tf.keras.Input(shape=spec.shape[1:], dtype=spec.dtype, name=name)
+ for name, spec in state_specs.items()
}
- states = inputs.get('states', {})
+ image = tf.keras.Input(shape=input_specs['image'].shape[1:], name='image')
+ inputs = {**states, 'image': image}
+
+ if backbone.use_external_states:
+ before_states = states
+ endpoints, states = backbone(inputs)
+ after_states = states
+
+ new_states = set(after_states) - set(before_states)
+ if new_states:
+ raise ValueError(
+ 'Expected input and output states to be the same. Got extra states '
+ '{}, expected {}'.format(new_states, set(before_states)))
+
+ mismatched_shapes = {}
+ for name in after_states:
+ before_shape = before_states[name].shape
+ after_shape = after_states[name].shape
+ if len(before_shape) != len(after_shape):
+ mismatched_shapes[name] = (before_shape, after_shape)
+ continue
+ for before, after in zip(before_shape, after_shape):
+ if before is not None and after is not None and before != after:
+ mismatched_shapes[name] = (before_shape, after_shape)
+ break
+ if mismatched_shapes:
+ raise ValueError(
+ 'Got mismatched input and output state shapes: {}'.format(
+ mismatched_shapes))
+ else:
+ endpoints, states = backbone(inputs)
- endpoints, states = backbone(dict(image=inputs['image'], states=states))
x = endpoints['head']
x = movinet_layers.ClassifierHead(
- head_filters=backbone._head_filters,
- num_classes=num_classes,
- dropout_rate=dropout_rate,
- kernel_initializer=kernel_initializer,
- kernel_regularizer=kernel_regularizer,
- conv_type=backbone._conv_type)(x)
-
- if output_states:
- inputs['states'] = {
- k: tf.keras.Input(shape=v.shape[1:], name=k)
- for k, v in states.items()
- }
+ head_filters=backbone.head_filters,
+ num_classes=self._num_classes,
+ dropout_rate=self._dropout_rate,
+ kernel_initializer=self._kernel_initializer,
+ kernel_regularizer=self._kernel_regularizer,
+ conv_type=backbone.conv_type)(
+ x)
- outputs = (x, states) if output_states else x
+ outputs = (x, states) if self._output_states else x
- super(MovinetClassifier, self).__init__(
- inputs=inputs, outputs=outputs, **kwargs)
+ return inputs, outputs
- # Move backbone after super() call so Keras is happy
- self._backbone = backbone
+ def initial_state_specs(
+ self, input_shape: Sequence[int]) -> Dict[str, tf.keras.layers.InputSpec]:
+ return self._backbone.initial_state_specs(input_shape=input_shape)
+
+ @tf.function
+ def init_states(self, input_shape: Sequence[int]) -> Dict[str, tf.Tensor]:
+ """Returns initial states for the first call in steaming mode."""
+ return self._backbone.init_states(input_shape)
@property
- def checkpoint_items(self):
+ def checkpoint_items(self) -> Dict[str, Any]:
"""Returns a dictionary of items to be additionally checkpointed."""
return dict(backbone=self.backbone)
@property
- def backbone(self):
+ def backbone(self) -> tf.keras.Model:
+ """Returns the backbone of the model."""
return self._backbone
def get_config(self):
@@ -141,10 +205,10 @@ def from_config(cls, config, custom_objects=None):
@model_factory.register_model_builder('movinet')
def build_movinet_model(
- input_specs: tf.keras.layers.InputSpec,
+ input_specs: Mapping[str, tf.keras.layers.InputSpec],
model_config: cfg.MovinetModel,
num_classes: int,
- l2_regularizer: tf.keras.regularizers.Regularizer = None):
+ l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None):
"""Builds movinet model."""
logging.info('Building movinet model with num classes: %s', num_classes)
if l2_regularizer is not None:
diff --git a/official/vision/beta/projects/movinet/modeling/movinet_model_test.py b/official/vision/beta/projects/movinet/modeling/movinet_model_test.py
index ba2b6dd6dbf..7d77f703504 100644
--- a/official/vision/beta/projects/movinet/modeling/movinet_model_test.py
+++ b/official/vision/beta/projects/movinet/modeling/movinet_model_test.py
@@ -48,28 +48,85 @@ def test_movinet_classifier_creation(self, is_training):
self.assertAllEqual([2, num_classes], logits.shape)
def test_movinet_classifier_stream(self):
+ """Test if the classifier can be run in streaming mode."""
tf.keras.backend.set_image_data_format('channels_last')
- model = movinet.Movinet(
+ backbone = movinet.Movinet(
model_id='a0',
causal=True,
+ use_external_states=True,
)
- inputs = tf.ones([1, 5, 128, 128, 3])
+ model = movinet_model.MovinetClassifier(
+ backbone, num_classes=600, output_states=True)
+
+ inputs = tf.ones([1, 8, 172, 172, 3])
+
+ init_states = model.init_states(tf.shape(inputs))
+ expected, _ = model({**init_states, 'image': inputs})
+
+ frames = tf.split(inputs, inputs.shape[1], axis=1)
+
+ states = init_states
+ for frame in frames:
+ output, states = model({**states, 'image': frame})
+ predicted = output
+
+ self.assertEqual(predicted.shape, expected.shape)
+ self.assertAllClose(predicted, expected, 1e-5, 1e-5)
+
+ def test_movinet_classifier_stream_pos_enc(self):
+ """Test if the classifier can be run in streaming mode with pos encoding."""
+ tf.keras.backend.set_image_data_format('channels_last')
+
+ backbone = movinet.Movinet(
+ model_id='a0',
+ causal=True,
+ use_external_states=True,
+ use_positional_encoding=True,
+ )
+ model = movinet_model.MovinetClassifier(
+ backbone, num_classes=600, output_states=True)
+
+ inputs = tf.ones([1, 8, 172, 172, 3])
- expected_endpoints, _ = model(dict(image=inputs, states={}))
+ init_states = model.init_states(tf.shape(inputs))
+ expected, _ = model({**init_states, 'image': inputs})
frames = tf.split(inputs, inputs.shape[1], axis=1)
- output, states = None, {}
+ states = init_states
for frame in frames:
- output, states = model(dict(image=frame, states=states))
- predicted_endpoints = output
+ output, states = model({**states, 'image': frame})
+ predicted = output
+
+ self.assertEqual(predicted.shape, expected.shape)
+ self.assertAllClose(predicted, expected, 1e-5, 1e-5)
+
+ def test_movinet_classifier_stream_pos_enc_2plus1d(self):
+ """Test if the model can run in streaming mode with pos encoding, (2+1)D."""
+ tf.keras.backend.set_image_data_format('channels_last')
+
+ backbone = movinet.Movinet(
+ model_id='a0',
+ causal=True,
+ use_external_states=True,
+ use_positional_encoding=True,
+ conv_type='2plus1d',
+ )
+ model = movinet_model.MovinetClassifier(
+ backbone, num_classes=600, output_states=True)
- predicted = predicted_endpoints['head']
+ inputs = tf.ones([1, 8, 172, 172, 3])
- # The expected final output is simply the mean across frames
- expected = expected_endpoints['head']
- expected = tf.reduce_mean(expected, 1, keepdims=True)
+ init_states = model.init_states(tf.shape(inputs))
+ expected, _ = model({**init_states, 'image': inputs})
+
+ frames = tf.split(inputs, inputs.shape[1], axis=1)
+
+ states = init_states
+ for frame in frames:
+ output, states = model({**states, 'image': frame})
+ predicted = output
self.assertEqual(predicted.shape, expected.shape)
self.assertAllClose(predicted, expected, 1e-5, 1e-5)
diff --git a/official/vision/beta/projects/movinet/modeling/movinet_test.py b/official/vision/beta/projects/movinet/modeling/movinet_test.py
index 6467af18b32..a0b3ba35f4b 100644
--- a/official/vision/beta/projects/movinet/modeling/movinet_test.py
+++ b/official/vision/beta/projects/movinet/modeling/movinet_test.py
@@ -48,14 +48,15 @@ def test_network_with_states(self):
"""Test creation of MoViNet family models with states."""
tf.keras.backend.set_image_data_format('channels_last')
- network = movinet.Movinet(
+ backbone = movinet.Movinet(
model_id='a0',
causal=True,
+ use_external_states=True,
)
inputs = tf.ones([1, 8, 128, 128, 3])
- _, states = network(inputs)
- endpoints, new_states = network(dict(image=inputs, states=states))
+ init_states = backbone.init_states(tf.shape(inputs))
+ endpoints, new_states = backbone({**init_states, 'image': inputs})
self.assertAllEqual(endpoints['stem'].shape, [1, 8, 64, 64, 8])
self.assertAllEqual(endpoints['b0/l0'].shape, [1, 8, 32, 32, 8])
@@ -65,25 +66,28 @@ def test_network_with_states(self):
self.assertAllEqual(endpoints['b4/l0'].shape, [1, 8, 4, 4, 104])
self.assertAllEqual(endpoints['head'].shape, [1, 1, 1, 1, 480])
- self.assertNotEmpty(states)
+ self.assertNotEmpty(init_states)
self.assertNotEmpty(new_states)
def test_movinet_stream(self):
+ """Test if the backbone can be run in streaming mode."""
tf.keras.backend.set_image_data_format('channels_last')
- model = movinet.Movinet(
+ backbone = movinet.Movinet(
model_id='a0',
causal=True,
+ use_external_states=True,
)
inputs = tf.ones([1, 5, 128, 128, 3])
- expected_endpoints, _ = model(dict(image=inputs, states={}))
+ init_states = backbone.init_states(tf.shape(inputs))
+ expected_endpoints, _ = backbone({**init_states, 'image': inputs})
frames = tf.split(inputs, inputs.shape[1], axis=1)
- output, states = None, {}
+ states = init_states
for frame in frames:
- output, states = model(dict(image=frame, states=states))
+ output, states = backbone({**states, 'image': frame})
predicted_endpoints = output
predicted = predicted_endpoints['head']
@@ -98,20 +102,22 @@ def test_movinet_stream(self):
def test_movinet_2plus1d_stream(self):
tf.keras.backend.set_image_data_format('channels_last')
- model = movinet.Movinet(
+ backbone = movinet.Movinet(
model_id='a0',
causal=True,
conv_type='2plus1d',
+ use_external_states=True,
)
inputs = tf.ones([1, 5, 128, 128, 3])
- expected_endpoints, _ = model(dict(image=inputs, states={}))
+ init_states = backbone.init_states(tf.shape(inputs))
+ expected_endpoints, _ = backbone({**init_states, 'image': inputs})
frames = tf.split(inputs, inputs.shape[1], axis=1)
- output, states = None, {}
+ states = init_states
for frame in frames:
- output, states = model(dict(image=frame, states=states))
+ output, states = backbone({**states, 'image': frame})
predicted_endpoints = output
predicted = predicted_endpoints['head']
@@ -126,20 +132,22 @@ def test_movinet_2plus1d_stream(self):
def test_movinet_3d_2plus1d_stream(self):
tf.keras.backend.set_image_data_format('channels_last')
- model = movinet.Movinet(
+ backbone = movinet.Movinet(
model_id='a0',
causal=True,
conv_type='3d_2plus1d',
+ use_external_states=True,
)
inputs = tf.ones([1, 5, 128, 128, 3])
- expected_endpoints, _ = model(dict(image=inputs, states={}))
+ init_states = backbone.init_states(tf.shape(inputs))
+ expected_endpoints, _ = backbone({**init_states, 'image': inputs})
frames = tf.split(inputs, inputs.shape[1], axis=1)
- output, states = None, {}
+ states = init_states
for frame in frames:
- output, states = model(dict(image=frame, states=states))
+ output, states = backbone({**states, 'image': frame})
predicted_endpoints = output
predicted = predicted_endpoints['head']
@@ -157,6 +165,7 @@ def test_serialize_deserialize(self):
model_id='a0',
causal=True,
use_positional_encoding=True,
+ use_external_states=True,
)
network = movinet.Movinet(**kwargs)
diff --git a/official/vision/beta/projects/simclr/configs/experiments/cifar_simclr_pretrain.yaml b/official/vision/beta/projects/simclr/configs/experiments/cifar_simclr_pretrain.yaml
index 5d5bd642efa..07d319a6929 100644
--- a/official/vision/beta/projects/simclr/configs/experiments/cifar_simclr_pretrain.yaml
+++ b/official/vision/beta/projects/simclr/configs/experiments/cifar_simclr_pretrain.yaml
@@ -72,7 +72,7 @@ trainer:
type: 'cosine'
cosine:
initial_learning_rate: 0.6 # 0.3 × BatchSize / 256
- decay_steps: 43200 # train_steps - warmup_steps
+ decay_steps: 48000
warmup:
type: 'linear'
linear:
diff --git a/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_finetune_gpu.yaml b/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_finetune_gpu.yaml
index 06973e207f4..13b02cdf113 100644
--- a/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_finetune_gpu.yaml
+++ b/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_finetune_gpu.yaml
@@ -1,4 +1,4 @@
-# ImageNet classification.
+# SimCLR Imagenet 10% finetuning.
runtime:
distribution_strategy: 'mirrored'
mixed_precision_dtype: 'float16'
@@ -55,7 +55,7 @@ trainer:
train_steps: 12500 # 100 epochs
validation_steps: 49 # NUM_EXAMPLES (50000) // global_batch_size
validation_interval: 125
- steps_per_loop: 125 # NUM_EXAMPLES (1281167) // global_batch_size
+ steps_per_loop: 125 # NUM_EXAMPLES (128116) // global_batch_size
summary_interval: 125
checkpoint_interval: 125
optimizer_config:
diff --git a/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_finetune_tpu.yaml b/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_finetune_tpu.yaml
new file mode 100644
index 00000000000..45cceb5fcd4
--- /dev/null
+++ b/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_finetune_tpu.yaml
@@ -0,0 +1,70 @@
+# SimCLR Imagenet 10% finetuning.
+runtime:
+ distribution_strategy: 'tpu'
+ mixed_precision_dtype: 'bfloat16'
+task:
+ model:
+ mode: 'finetune'
+ input_size: [224, 224, 3]
+ backbone:
+ type: 'resnet'
+ resnet:
+ model_id: 50
+ backbone_trainable: true
+ projection_head:
+ proj_output_dim: 128
+ num_proj_layers: 3
+ ft_proj_idx: 1
+ supervised_head:
+ num_classes: 1001
+ zero_init: true
+ norm_activation:
+ use_sync_bn: false
+ norm_momentum: 0.9
+ norm_epsilon: 0.00001
+ loss:
+ label_smoothing: 0.0
+ one_hot: true
+ evaluation:
+ top_k: 5
+ one_hot: true
+ init_checkpoint: gs://tf_model_garden/vision/simclr/r50_1x
+ init_checkpoint_modules: 'backbone_projection'
+ train_data:
+ tfds_name: 'imagenet2012_subset/10pct'
+ tfds_split: 'train'
+ input_path: ''
+ is_training: true
+ global_batch_size: 1024
+ dtype: 'bfloat16'
+ parser:
+ mode: 'finetune'
+ validation_data:
+ tfds_name: 'imagenet2012_subset/10pct'
+ tfds_split: 'validation'
+ input_path: ''
+ is_training: false
+ global_batch_size: 1024
+ dtype: 'bfloat16'
+ drop_remainder: false
+ parser:
+ mode: 'finetune'
+trainer:
+ train_steps: 12500 # 100 epochs
+ validation_steps: 49 # NUM_EXAMPLES (50000) // global_batch_size
+ validation_interval: 125
+ steps_per_loop: 125 # NUM_EXAMPLES (128116) // global_batch_size
+ summary_interval: 125
+ checkpoint_interval: 125
+ optimizer_config:
+ optimizer:
+ type: 'lars'
+ lars:
+ momentum: 0.9
+ weight_decay_rate: 0.0
+ exclude_from_weight_decay: ['batch_normalization', 'bias']
+ learning_rate:
+ type: 'cosine'
+ cosine:
+ initial_learning_rate: 0.04 # 0.01 × BatchSize / 512
+ decay_steps: 12500 # train_steps
diff --git a/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_pretrain_gpu.yaml b/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_pretrain_gpu.yaml
index 9e7c326c3d6..f2fa25ef8e7 100644
--- a/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_pretrain_gpu.yaml
+++ b/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_pretrain_gpu.yaml
@@ -1,4 +1,4 @@
-# ImageNet classification.
+# SimCLR Imagenet pretraining.
runtime:
distribution_strategy: 'mirrored'
mixed_precision_dtype: 'float16'
@@ -49,12 +49,12 @@ task:
decoder:
decode_label: true
trainer:
- train_steps: 187200 # 300 epochs
+ train_steps: 500000 # 800 epochs
validation_steps: 24 # NUM_EXAMPLES (50000) // global_batch_size
- validation_interval: 624
- steps_per_loop: 624 # NUM_EXAMPLES (1281167) // global_batch_size
- summary_interval: 624
- checkpoint_interval: 624
+ validation_interval: 625
+ steps_per_loop: 625 # NUM_EXAMPLES (1281167) // global_batch_size
+ summary_interval: 625
+ checkpoint_interval: 625
optimizer_config:
optimizer:
type: 'lars'
@@ -66,8 +66,8 @@ trainer:
type: 'cosine'
cosine:
initial_learning_rate: 1.6 # 0.2 * BatchSize / 256
- decay_steps: 177840 # train_steps - warmup_steps
+ decay_steps: 500000
warmup:
type: 'linear'
linear:
- warmup_steps: 9360 # 5% of total epochs
+ warmup_steps: 25000 # 5% of total epochs
diff --git a/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_pretrain_tpu.yaml b/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_pretrain_tpu.yaml
new file mode 100644
index 00000000000..f5c8045483b
--- /dev/null
+++ b/official/vision/beta/projects/simclr/configs/experiments/imagenet_simclr_pretrain_tpu.yaml
@@ -0,0 +1,71 @@
+# SimCLR Imagenet pretraining.
+runtime:
+ distribution_strategy: 'tpu'
+ mixed_precision_dtype: 'bfloat16'
+task:
+ model:
+ mode: 'pretrain'
+ input_size: [224, 224, 3]
+ backbone:
+ type: 'resnet'
+ resnet:
+ model_id: 50
+ backbone_trainable: true
+ projection_head:
+ proj_output_dim: 128
+ num_proj_layers: 3
+ ft_proj_idx: 0
+ supervised_head:
+ num_classes: 1001
+ norm_activation:
+ use_sync_bn: true
+ norm_momentum: 0.9
+ norm_epsilon: 0.00001
+ loss:
+ projection_norm: true
+ temperature: 0.1
+ evaluation:
+ top_k: 5
+ one_hot: true
+ train_data:
+ input_path: '/readahead/200M/placer/prod/home/distbelief/imagenet-tensorflow/imagenet-2012-tfrecord/train*'
+ is_training: true
+ global_batch_size: 2048
+ dtype: 'bfloat16'
+ parser:
+ mode: 'pretrain'
+ decoder:
+ decode_label: true
+ validation_data:
+ input_path: '/readahead/200M/placer/prod/home/distbelief/imagenet-tensorflow/imagenet-2012-tfrecord/valid*'
+ is_training: false
+ global_batch_size: 2048
+ dtype: 'bfloat16'
+ drop_remainder: false
+ parser:
+ mode: 'pretrain'
+ decoder:
+ decode_label: true
+trainer:
+ train_steps: 500000 # 800 epochs
+ validation_steps: 24 # NUM_EXAMPLES (50000) // global_batch_size
+ validation_interval: 625
+ steps_per_loop: 625 # NUM_EXAMPLES (1281167) // global_batch_size
+ summary_interval: 625
+ checkpoint_interval: 625
+ optimizer_config:
+ optimizer:
+ type: 'lars'
+ lars:
+ momentum: 0.9
+ weight_decay_rate: 0.000001
+ exclude_from_weight_decay: ['batch_normalization', 'bias']
+ learning_rate:
+ type: 'cosine'
+ cosine:
+ initial_learning_rate: 1.6 # 0.2 * BatchSize / 256
+ decay_steps: 500000
+ warmup:
+ type: 'linear'
+ linear:
+ warmup_steps: 25000 # 5% of total epochs
diff --git a/official/vision/beta/projects/yolo/README.md b/official/vision/beta/projects/yolo/README.md
index 0a1e27fbe90..5cd4d1f2e59 100644
--- a/official/vision/beta/projects/yolo/README.md
+++ b/official/vision/beta/projects/yolo/README.md
@@ -1,3 +1,6 @@
+DISCLAIMER: this YOLO implementation is still under development. No support will
+be provided during the development phase.
+
# YOLO Object Detectors, You Only Look Once
[](https://arxiv.org/abs/1804.02767)
@@ -74,3 +77,5 @@ head could be connected to a new, more powerful backbone if a person chose to.
[](https://github.com/tensorflow/tensorflow/releases/tag/v2.2.0)
[](https://www.python.org/downloads/release/python-380/)
+
+
diff --git a/official/vision/beta/projects/yolo/configs/backbones.py b/official/vision/beta/projects/yolo/configs/backbones.py
index a79cb09e17e..46e378317c3 100644
--- a/official/vision/beta/projects/yolo/configs/backbones.py
+++ b/official/vision/beta/projects/yolo/configs/backbones.py
@@ -24,11 +24,14 @@
@dataclasses.dataclass
-class DarkNet(hyperparams.Config):
- """DarkNet config."""
- model_id: str = "darknet53"
+class Darknet(hyperparams.Config):
+ """Darknet config."""
+ model_id: str = 'darknet53'
+ width_scale: float = 1.0
+ depth_scale: float = 1.0
+ dilate: bool = False
@dataclasses.dataclass
class Backbone(backbones.Backbone):
- darknet: DarkNet = DarkNet()
+ darknet: Darknet = Darknet()
diff --git a/official/vision/beta/projects/yolo/configs/darknet_classification.py b/official/vision/beta/projects/yolo/configs/darknet_classification.py
index b33e149d484..ffaf387fac0 100644
--- a/official/vision/beta/projects/yolo/configs/darknet_classification.py
+++ b/official/vision/beta/projects/yolo/configs/darknet_classification.py
@@ -32,7 +32,7 @@ class ImageClassificationModel(hyperparams.Config):
num_classes: int = 0
input_size: List[int] = dataclasses.field(default_factory=list)
backbone: backbones.Backbone = backbones.Backbone(
- type='darknet', resnet=backbones.DarkNet())
+ type='darknet', darknet=backbones.Darknet())
dropout_rate: float = 0.0
norm_activation: common.NormActivation = common.NormActivation()
# Adds a BatchNormalization layer pre-GlobalAveragePooling in classification
diff --git a/official/vision/beta/projects/yolo/modeling/backbones/darknet.py b/official/vision/beta/projects/yolo/modeling/backbones/darknet.py
index 170c6bb7680..783b46b8c57 100644
--- a/official/vision/beta/projects/yolo/modeling/backbones/darknet.py
+++ b/official/vision/beta/projects/yolo/modeling/backbones/darknet.py
@@ -13,7 +13,6 @@
# limitations under the License.
# Lint as: python3
-
"""Contains definitions of Darknet Backbone Networks.
The models are inspired by ResNet, and CSPNet
@@ -29,15 +28,15 @@
arXiv:1911.11929
-DarkNets Are used mainly for Object detection in:
+Darknets are used mainly for object detection in:
[1] Joseph Redmon, Ali Farhadi
YOLOv3: An Incremental Improvement. arXiv:1804.02767
[2] Alexey Bochkovskiy, Chien-Yao Wang, Hong-Yuan Mark Liao
YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv:2004.10934
"""
-import collections
+import collections
import tensorflow as tf
from official.modeling import hyperparams
@@ -45,28 +44,32 @@
from official.vision.beta.projects.yolo.modeling.layers import nn_blocks
-class BlockConfig(object):
- """Get layer config to make code more readable.
-
- Args:
- layer: string layer name
- stack: the type of layer ordering to use for this specific level
- repetitions: integer for the number of times to repeat block
- bottelneck: boolean for does this stack have a bottle neck layer
- filters: integer for the output depth of the level
- pool_size: integer the pool_size of max pool layers
- kernel_size: optional integer, for convolution kernel size
- strides: integer or tuple to indicate convolution strides
- padding: the padding to apply to layers in this stack
- activation: string for the activation to use for this stack
- route: integer for what level to route from to get the next input
- output_name: the name to use for this output
- is_output: is this layer an output in the default model
- """
+class BlockConfig:
+ """Class to store layer config to make code more readable."""
def __init__(self, layer, stack, reps, bottleneck, filters, pool_size,
- kernel_size, strides, padding, activation, route, output_name,
- is_output):
+ kernel_size, strides, padding, activation, route, dilation_rate,
+ output_name, is_output):
+ """Initializing method for BlockConfig.
+
+ Args:
+ layer: A `str` for layer name.
+ stack: A `str` for the type of layer ordering to use for this specific
+ level.
+ reps: An `int` for the number of times to repeat block.
+ bottleneck: A `bool` for whether this stack has a bottle neck layer.
+ filters: An `int` for the output depth of the level.
+ pool_size: An `int` for the pool_size of max pool layers.
+ kernel_size: An `int` for convolution kernel size.
+ strides: A `Union[int, tuple]` that indicates convolution strides.
+ padding: An `int` for the padding to apply to layers in this stack.
+ activation: A `str` for the activation to use for this stack.
+ route: An `int` for the level to route from to get the next input.
+ dilation_rate: An `int` for the scale used in dialated Darknet.
+ output_name: A `str` for the name to use for this output.
+ is_output: A `bool` for whether this layer is an output in the default
+ model.
+ """
self.layer = layer
self.stack = stack
self.repetitions = reps
@@ -78,6 +81,7 @@ def __init__(self, layer, stack, reps, bottleneck, filters, pool_size,
self.padding = padding
self.activation = activation
self.route = route
+ self.dilation_rate = dilation_rate
self.output_name = output_name
self.is_output = is_output
@@ -89,41 +93,41 @@ def build_block_specs(config):
return specs
-class LayerFactory(object):
- """Class for quick look up of default layers.
+class LayerBuilder:
+ """Layer builder class.
- Used by darknet to connect, introduce or exit a level. Used in place of an if
- condition or switch to make adding new layers easier and to reduce redundant
- code.
+ Class for quick look up of default layers used by darknet to
+ connect, introduce or exit a level. Used in place of an if condition
+ or switch to make adding new layers easier and to reduce redundant code.
"""
def __init__(self):
self._layer_dict = {
- "ConvBN": (nn_blocks.ConvBN, self.conv_bn_config_todict),
- "MaxPool": (tf.keras.layers.MaxPool2D, self.maxpool_config_todict)
+ 'ConvBN': (nn_blocks.ConvBN, self.conv_bn_config_todict),
+ 'MaxPool': (tf.keras.layers.MaxPool2D, self.maxpool_config_todict)
}
def conv_bn_config_todict(self, config, kwargs):
dictvals = {
- "filters": config.filters,
- "kernel_size": config.kernel_size,
- "strides": config.strides,
- "padding": config.padding
+ 'filters': config.filters,
+ 'kernel_size': config.kernel_size,
+ 'strides': config.strides,
+ 'padding': config.padding
}
dictvals.update(kwargs)
return dictvals
def darktiny_config_todict(self, config, kwargs):
- dictvals = {"filters": config.filters, "strides": config.strides}
+ dictvals = {'filters': config.filters, 'strides': config.strides}
dictvals.update(kwargs)
return dictvals
def maxpool_config_todict(self, config, kwargs):
return {
- "pool_size": config.pool_size,
- "strides": config.strides,
- "padding": config.padding,
- "name": kwargs["name"]
+ 'pool_size': config.pool_size,
+ 'strides': config.strides,
+ 'padding': config.padding,
+ 'name': kwargs['name']
}
def __call__(self, config, kwargs):
@@ -134,90 +138,259 @@ def __call__(self, config, kwargs):
# model configs
LISTNAMES = [
- "default_layer_name", "level_type", "number_of_layers_in_level",
- "bottleneck", "filters", "kernal_size", "pool_size", "strides", "padding",
- "default_activation", "route", "level/name", "is_output"
+ 'default_layer_name', 'level_type', 'number_of_layers_in_level',
+ 'bottleneck', 'filters', 'kernal_size', 'pool_size', 'strides', 'padding',
+ 'default_activation', 'route', 'dilation', 'level/name', 'is_output'
]
-# pylint: disable=line-too-long
CSPDARKNET53 = {
- "list_names": LISTNAMES,
- "splits": {"backbone_split": 106,
- "neck_split": 138},
- "backbone": [
- ["ConvBN", None, 1, False, 32, None, 3, 1, "same", "mish", -1, 0, False],
- ["DarkRes", "csp", 1, True, 64, None, None, None, None, "mish", -1, 1, False],
- ["DarkRes", "csp", 2, False, 128, None, None, None, None, "mish", -1, 2, False],
- ["DarkRes", "csp", 8, False, 256, None, None, None, None, "mish", -1, 3, True],
- ["DarkRes", "csp", 8, False, 512, None, None, None, None, "mish", -1, 4, True],
- ["DarkRes", "csp", 4, False, 1024, None, None, None, None, "mish", -1, 5, True],
+ 'list_names':
+ LISTNAMES,
+ 'splits': {
+ 'backbone_split': 106,
+ 'neck_split': 132
+ },
+ 'backbone': [
+ [
+ 'ConvBN', None, 1, False, 32, None, 3, 1, 'same', 'mish', -1, 1, 0,
+ False
+ ],
+ [
+ 'DarkRes', 'csp', 1, True, 64, None, None, None, None, 'mish', -1,
+ 1, 1, False
+ ],
+ [
+ 'DarkRes', 'csp', 2, False, 128, None, None, None, None, 'mish', -1,
+ 1, 2, False
+ ],
+ [
+ 'DarkRes', 'csp', 8, False, 256, None, None, None, None, 'mish', -1,
+ 1, 3, True
+ ],
+ [
+ 'DarkRes', 'csp', 8, False, 512, None, None, None, None, 'mish', -1,
+ 2, 4, True
+ ],
+ [
+ 'DarkRes', 'csp', 4, False, 1024, None, None, None, None, 'mish',
+ -1, 4, 5, True
+ ],
+ ]
+}
+
+CSPADARKNET53 = {
+ 'list_names':
+ LISTNAMES,
+ 'splits': {
+ 'backbone_split': 100,
+ 'neck_split': 135
+ },
+ 'backbone': [
+ [
+ 'ConvBN', None, 1, False, 32, None, 3, 1, 'same', 'mish', -1, 1, 0,
+ False
+ ],
+ [
+ 'DarkRes', 'residual', 1, True, 64, None, None, None, None, 'mish',
+ -1, 1, 1, False
+ ],
+ [
+ 'DarkRes', 'csp', 2, False, 128, None, None, None, None, 'mish', -1,
+ 1, 2, False
+ ],
+ [
+ 'DarkRes', 'csp', 8, False, 256, None, None, None, None, 'mish', -1,
+ 1, 3, True
+ ],
+ [
+ 'DarkRes', 'csp', 8, False, 512, None, None, None, None, 'mish', -1,
+ 2, 4, True
+ ],
+ [
+ 'DarkRes', 'csp', 4, False, 1024, None, None, None, None, 'mish',
+ -1, 4, 5, True
+ ],
+ ]
+}
+
+LARGECSP53 = {
+ 'list_names':
+ LISTNAMES,
+ 'splits': {
+ 'backbone_split': 100,
+ 'neck_split': 135
+ },
+ 'backbone': [
+ [
+ 'ConvBN', None, 1, False, 32, None, 3, 1, 'same', 'mish', -1, 1, 0,
+ False
+ ],
+ [
+ 'DarkRes', 'csp', 1, True, 64, None, None, None, None, 'mish', -1,
+ 1, 1, False
+ ],
+ [
+ 'DarkRes', 'csp', 3, False, 128, None, None, None, None, 'mish', -1,
+ 1, 2, False
+ ],
+ [
+ 'DarkRes', 'csp', 15, False, 256, None, None, None, None, 'mish',
+ -1, 1, 3, True
+ ],
+ [
+ 'DarkRes', 'csp', 15, False, 512, None, None, None, None, 'mish',
+ -1, 2, 4, True
+ ],
+ [
+ 'DarkRes', 'csp', 7, False, 1024, None, None, None, None, 'mish',
+ -1, 4, 5, True
+ ],
+ [
+ 'DarkRes', 'csp', 7, False, 1024, None, None, None, None, 'mish',
+ -1, 8, 6, True
+ ],
+ [
+ 'DarkRes', 'csp', 7, False, 1024, None, None, None, None, 'mish',
+ -1, 16, 7, True
+ ],
]
}
DARKNET53 = {
- "list_names": LISTNAMES,
- "splits": {"backbone_split": 76},
- "backbone": [
- ["ConvBN", None, 1, False, 32, None, 3, 1, "same", "leaky", -1, 0, False],
- ["DarkRes", "residual", 1, True, 64, None, None, None, None, "leaky", -1, 1, False],
- ["DarkRes", "residual", 2, False, 128, None, None, None, None, "leaky", -1, 2, False],
- ["DarkRes", "residual", 8, False, 256, None, None, None, None, "leaky", -1, 3, True],
- ["DarkRes", "residual", 8, False, 512, None, None, None, None, "leaky", -1, 4, True],
- ["DarkRes", "residual", 4, False, 1024, None, None, None, None, "leaky", -1, 5, True],
+ 'list_names':
+ LISTNAMES,
+ 'splits': {
+ 'backbone_split': 76
+ },
+ 'backbone': [
+ [
+ 'ConvBN', None, 1, False, 32, None, 3, 1, 'same', 'leaky', -1, 1, 0,
+ False
+ ],
+ [
+ 'DarkRes', 'residual', 1, True, 64, None, None, None, None, 'leaky',
+ -1, 1, 1, False
+ ],
+ [
+ 'DarkRes', 'residual', 2, False, 128, None, None, None, None,
+ 'leaky', -1, 1, 2, False
+ ],
+ [
+ 'DarkRes', 'residual', 8, False, 256, None, None, None, None,
+ 'leaky', -1, 1, 3, True
+ ],
+ [
+ 'DarkRes', 'residual', 8, False, 512, None, None, None, None,
+ 'leaky', -1, 2, 4, True
+ ],
+ [
+ 'DarkRes', 'residual', 4, False, 1024, None, None, None, None,
+ 'leaky', -1, 4, 5, True
+ ],
]
}
CSPDARKNETTINY = {
- "list_names": LISTNAMES,
- "splits": {"backbone_split": 28},
- "backbone": [
- ["ConvBN", None, 1, False, 32, None, 3, 2, "same", "leaky", -1, 0, False],
- ["ConvBN", None, 1, False, 64, None, 3, 2, "same", "leaky", -1, 1, False],
- ["CSPTiny", "csp_tiny", 1, False, 64, None, 3, 2, "same", "leaky", -1, 2, False],
- ["CSPTiny", "csp_tiny", 1, False, 128, None, 3, 2, "same", "leaky", -1, 3, False],
- ["CSPTiny", "csp_tiny", 1, False, 256, None, 3, 2, "same", "leaky", -1, 4, True],
- ["ConvBN", None, 1, False, 512, None, 3, 1, "same", "leaky", -1, 5, True],
+ 'list_names':
+ LISTNAMES,
+ 'splits': {
+ 'backbone_split': 28
+ },
+ 'backbone': [
+ [
+ 'ConvBN', None, 1, False, 32, None, 3, 2, 'same', 'leaky', -1, 1, 0,
+ False
+ ],
+ [
+ 'ConvBN', None, 1, False, 64, None, 3, 2, 'same', 'leaky', -1, 1, 1,
+ False
+ ],
+ [
+ 'CSPTiny', 'csp_tiny', 1, False, 64, None, 3, 2, 'same', 'leaky',
+ -1, 1, 2, False
+ ],
+ [
+ 'CSPTiny', 'csp_tiny', 1, False, 128, None, 3, 2, 'same', 'leaky',
+ -1, 1, 3, False
+ ],
+ [
+ 'CSPTiny', 'csp_tiny', 1, False, 256, None, 3, 2, 'same', 'leaky',
+ -1, 1, 4, True
+ ],
+ [
+ 'ConvBN', None, 1, False, 512, None, 3, 1, 'same', 'leaky', -1, 1,
+ 5, True
+ ],
]
}
DARKNETTINY = {
- "list_names": LISTNAMES,
- "splits": {"backbone_split": 14},
- "backbone": [
- ["ConvBN", None, 1, False, 16, None, 3, 1, "same", "leaky", -1, 0, False],
- ["DarkTiny", "tiny", 1, True, 32, None, 3, 2, "same", "leaky", -1, 1, False],
- ["DarkTiny", "tiny", 1, True, 64, None, 3, 2, "same", "leaky", -1, 2, False],
- ["DarkTiny", "tiny", 1, False, 128, None, 3, 2, "same", "leaky", -1, 3, False],
- ["DarkTiny", "tiny", 1, False, 256, None, 3, 2, "same", "leaky", -1, 4, True],
- ["DarkTiny", "tiny", 1, False, 512, None, 3, 2, "same", "leaky", -1, 5, False],
- ["DarkTiny", "tiny", 1, False, 1024, None, 3, 1, "same", "leaky", -1, 5, True],
+ 'list_names':
+ LISTNAMES,
+ 'splits': {
+ 'backbone_split': 14
+ },
+ 'backbone': [
+ [
+ 'ConvBN', None, 1, False, 16, None, 3, 1, 'same', 'leaky', -1, 1, 0,
+ False
+ ],
+ [
+ 'DarkTiny', 'tiny', 1, True, 32, None, 3, 2, 'same', 'leaky', -1, 1,
+ 1, False
+ ],
+ [
+ 'DarkTiny', 'tiny', 1, True, 64, None, 3, 2, 'same', 'leaky', -1, 1,
+ 2, False
+ ],
+ [
+ 'DarkTiny', 'tiny', 1, False, 128, None, 3, 2, 'same', 'leaky', -1,
+ 1, 3, False
+ ],
+ [
+ 'DarkTiny', 'tiny', 1, False, 256, None, 3, 2, 'same', 'leaky', -1,
+ 1, 4, True
+ ],
+ [
+ 'DarkTiny', 'tiny', 1, False, 512, None, 3, 2, 'same', 'leaky', -1,
+ 1, 5, False
+ ],
+ [
+ 'DarkTiny', 'tiny', 1, False, 1024, None, 3, 1, 'same', 'leaky', -1,
+ 1, 5, True
+ ],
]
}
-# pylint: enable=line-too-long
BACKBONES = {
- "darknettiny": DARKNETTINY,
- "darknet53": DARKNET53,
- "cspdarknet53": CSPDARKNET53,
- "cspdarknettiny": CSPDARKNETTINY
+ 'darknettiny': DARKNETTINY,
+ 'darknet53': DARKNET53,
+ 'cspdarknet53': CSPDARKNET53,
+ 'altered_cspdarknet53': CSPADARKNET53,
+ 'cspdarknettiny': CSPDARKNETTINY,
+ 'csp-large': LARGECSP53,
}
-@tf.keras.utils.register_keras_serializable(package="yolo")
+@tf.keras.utils.register_keras_serializable(package='yolo')
class Darknet(tf.keras.Model):
- """Darknet backbone."""
+ """The Darknet backbone architecture."""
def __init__(
self,
- model_id="darknet53",
+ model_id='darknet53',
input_specs=tf.keras.layers.InputSpec(shape=[None, None, None, 3]),
min_level=None,
max_level=5,
+ width_scale=1.0,
+ depth_scale=1.0,
+ csp_level_mod=(),
activation=None,
use_sync_bn=False,
norm_momentum=0.99,
norm_epsilon=0.001,
- kernel_initializer="glorot_uniform",
+ dilate=False,
+ kernel_initializer='glorot_uniform',
kernel_regularizer=None,
bias_regularizer=None,
**kwargs):
@@ -227,12 +400,13 @@ def __init__(
self._model_name = model_id
self._splits = splits
self._input_shape = input_specs
- self._registry = LayerFactory()
+ self._registry = LayerBuilder()
# default layer look up
self._min_size = min_level
self._max_size = max_level
self._output_specs = None
+ self._csp_level_mod = set(csp_level_mod)
self._kernel_initializer = kernel_initializer
self._bias_regularizer = bias_regularizer
@@ -241,16 +415,20 @@ def __init__(
self._use_sync_bn = use_sync_bn
self._activation = activation
self._kernel_regularizer = kernel_regularizer
+ self._dilate = dilate
+ self._width_scale = width_scale
+ self._depth_scale = depth_scale
self._default_dict = {
- "kernel_initializer": self._kernel_initializer,
- "kernel_regularizer": self._kernel_regularizer,
- "bias_regularizer": self._bias_regularizer,
- "norm_momentum": self._norm_momentum,
- "norm_epsilon": self._norm_epislon,
- "use_sync_bn": self._use_sync_bn,
- "activation": self._activation,
- "name": None
+ 'kernel_initializer': self._kernel_initializer,
+ 'kernel_regularizer': self._kernel_regularizer,
+ 'bias_regularizer': self._bias_regularizer,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epislon,
+ 'use_sync_bn': self._use_sync_bn,
+ 'activation': self._activation,
+ 'dilation_rate': 1,
+ 'name': None
}
inputs = tf.keras.layers.Input(shape=self._input_shape.shape[1:])
@@ -273,33 +451,39 @@ def _build_struct(self, net, inputs):
endpoints = collections.OrderedDict()
stack_outputs = [inputs]
for i, config in enumerate(net):
+ if config.output_name > self._max_size:
+ break
+ if config.output_name in self._csp_level_mod:
+ config.stack = 'residual'
+
+ config.filters = int(config.filters * self._width_scale)
+ config.repetitions = int(config.repetitions * self._depth_scale)
+
if config.stack is None:
- x = self._build_block(stack_outputs[config.route],
- config,
- name=f"{config.layer}_{i}")
+ x = self._build_block(
+ stack_outputs[config.route], config, name=f'{config.layer}_{i}')
stack_outputs.append(x)
- elif config.stack == "residual":
- x = self._residual_stack(stack_outputs[config.route],
- config,
- name=f"{config.layer}_{i}")
+ elif config.stack == 'residual':
+ x = self._residual_stack(
+ stack_outputs[config.route], config, name=f'{config.layer}_{i}')
stack_outputs.append(x)
- elif config.stack == "csp":
- x = self._csp_stack(stack_outputs[config.route],
- config,
- name=f"{config.layer}_{i}")
+ elif config.stack == 'csp':
+ x = self._csp_stack(
+ stack_outputs[config.route], config, name=f'{config.layer}_{i}')
stack_outputs.append(x)
- elif config.stack == "csp_tiny":
- x_pass, x = self._csp_tiny_stack(stack_outputs[config.route],
- config, name=f"{config.layer}_{i}")
+ elif config.stack == 'csp_tiny':
+ x_pass, x = self._csp_tiny_stack(
+ stack_outputs[config.route], config, name=f'{config.layer}_{i}')
stack_outputs.append(x_pass)
- elif config.stack == "tiny":
- x = self._tiny_stack(stack_outputs[config.route],
- config,
- name=f"{config.layer}_{i}")
+ elif config.stack == 'tiny':
+ x = self._tiny_stack(
+ stack_outputs[config.route], config, name=f'{config.layer}_{i}')
stack_outputs.append(x)
if (config.is_output and self._min_size is None):
endpoints[str(config.output_name)] = x
- elif self._min_size is not None and config.output_name >= self._min_size and config.output_name <= self._max_size:
+ elif (self._min_size is not None and
+ config.output_name >= self._min_size and
+ config.output_name <= self._max_size):
endpoints[str(config.output_name)] = x
self._output_specs = {l: endpoints[l].get_shape() for l in endpoints.keys()}
@@ -308,8 +492,7 @@ def _build_struct(self, net, inputs):
def _get_activation(self, activation):
if self._activation is None:
return activation
- else:
- return self._activation
+ return self._activation
def _csp_stack(self, inputs, config, name):
if config.bottleneck:
@@ -320,86 +503,135 @@ def _csp_stack(self, inputs, config, name):
csp_filter_scale = 2
residual_filter_scale = 1
scale_filters = 2
- self._default_dict["activation"] = self._get_activation(config.activation)
- self._default_dict["name"] = f"{name}_csp_down"
- x, x_route = nn_blocks.CSPRoute(filters=config.filters,
- filter_scale=csp_filter_scale,
- downsample=True,
- **self._default_dict)(inputs)
- for i in range(config.repetitions):
- self._default_dict["name"] = f"{name}_{i}"
- x = nn_blocks.DarkResidual(filters=config.filters // scale_filters,
- filter_scale=residual_filter_scale,
- **self._default_dict)(x)
-
- self._default_dict["name"] = f"{name}_csp_connect"
- output = nn_blocks.CSPConnect(filters=config.filters,
- filter_scale=csp_filter_scale,
- **self._default_dict)([x, x_route])
- self._default_dict["activation"] = self._activation
- self._default_dict["name"] = None
+ self._default_dict['activation'] = self._get_activation(config.activation)
+ self._default_dict['name'] = f'{name}_csp_down'
+ if self._dilate:
+ self._default_dict['dilation_rate'] = config.dilation_rate
+ else:
+ self._default_dict['dilation_rate'] = 1
+
+ # swap/add dilation
+ x, x_route = nn_blocks.CSPRoute(
+ filters=config.filters,
+ filter_scale=csp_filter_scale,
+ downsample=True,
+ **self._default_dict)(
+ inputs)
+
+ dilated_reps = config.repetitions - self._default_dict['dilation_rate'] // 2
+ for i in range(dilated_reps):
+ self._default_dict['name'] = f'{name}_{i}'
+ x = nn_blocks.DarkResidual(
+ filters=config.filters // scale_filters,
+ filter_scale=residual_filter_scale,
+ **self._default_dict)(
+ x)
+
+ for i in range(dilated_reps, config.repetitions):
+ self._default_dict[
+ 'dilation_rate'] = self._default_dict['dilation_rate'] // 2
+ self._default_dict[
+ 'name'] = f"{name}_{i}_degridded_{self._default_dict['dilation_rate']}"
+ x = nn_blocks.DarkResidual(
+ filters=config.filters // scale_filters,
+ filter_scale=residual_filter_scale,
+ **self._default_dict)(
+ x)
+
+ self._default_dict['name'] = f'{name}_csp_connect'
+ output = nn_blocks.CSPConnect(
+ filters=config.filters,
+ filter_scale=csp_filter_scale,
+ **self._default_dict)([x, x_route])
+ self._default_dict['activation'] = self._activation
+ self._default_dict['name'] = None
return output
def _csp_tiny_stack(self, inputs, config, name):
- self._default_dict["activation"] = self._get_activation(config.activation)
- self._default_dict["name"] = f"{name}_csp_tiny"
- x, x_route = nn_blocks.CSPTiny(filters=config.filters,
- **self._default_dict)(inputs)
- self._default_dict["activation"] = self._activation
- self._default_dict["name"] = None
+ self._default_dict['activation'] = self._get_activation(config.activation)
+ self._default_dict['name'] = f'{name}_csp_tiny'
+ x, x_route = nn_blocks.CSPTiny(
+ filters=config.filters, **self._default_dict)(
+ inputs)
+ self._default_dict['activation'] = self._activation
+ self._default_dict['name'] = None
return x, x_route
def _tiny_stack(self, inputs, config, name):
- x = tf.keras.layers.MaxPool2D(pool_size=2,
- strides=config.strides,
- padding="same",
- data_format=None,
- name=f"{name}_tiny/pool")(inputs)
- self._default_dict["activation"] = self._get_activation(config.activation)
- self._default_dict["name"] = f"{name}_tiny/conv"
+ x = tf.keras.layers.MaxPool2D(
+ pool_size=2,
+ strides=config.strides,
+ padding='same',
+ data_format=None,
+ name=f'{name}_tiny/pool')(
+ inputs)
+ self._default_dict['activation'] = self._get_activation(config.activation)
+ self._default_dict['name'] = f'{name}_tiny/conv'
x = nn_blocks.ConvBN(
filters=config.filters,
kernel_size=(3, 3),
strides=(1, 1),
- padding="same",
+ padding='same',
**self._default_dict)(
x)
- self._default_dict["activation"] = self._activation
- self._default_dict["name"] = None
+ self._default_dict['activation'] = self._activation
+ self._default_dict['name'] = None
return x
def _residual_stack(self, inputs, config, name):
- self._default_dict["activation"] = self._get_activation(config.activation)
- self._default_dict["name"] = f"{name}_residual_down"
- x = nn_blocks.DarkResidual(filters=config.filters,
- downsample=True,
- **self._default_dict)(inputs)
- for i in range(config.repetitions - 1):
- self._default_dict["name"] = f"{name}_{i}"
- x = nn_blocks.DarkResidual(filters=config.filters,
- **self._default_dict)(x)
- self._default_dict["activation"] = self._activation
- self._default_dict["name"] = None
+ self._default_dict['activation'] = self._get_activation(config.activation)
+ self._default_dict['name'] = f'{name}_residual_down'
+ if self._dilate:
+ self._default_dict['dilation_rate'] = config.dilation_rate
+ if config.repetitions < 8:
+ config.repetitions += 2
+ else:
+ self._default_dict['dilation_rate'] = 1
+
+ x = nn_blocks.DarkResidual(
+ filters=config.filters, downsample=True, **self._default_dict)(
+ inputs)
+
+ dilated_reps = config.repetitions - (
+ self._default_dict['dilation_rate'] // 2) - 1
+ for i in range(dilated_reps):
+ self._default_dict['name'] = f'{name}_{i}'
+ x = nn_blocks.DarkResidual(
+ filters=config.filters, **self._default_dict)(
+ x)
+
+ for i in range(dilated_reps, config.repetitions - 1):
+ self._default_dict[
+ 'dilation_rate'] = self._default_dict['dilation_rate'] // 2
+ self._default_dict[
+ 'name'] = f"{name}_{i}_degridded_{self._default_dict['dilation_rate']}"
+ x = nn_blocks.DarkResidual(
+ filters=config.filters, **self._default_dict)(
+ x)
+
+ self._default_dict['activation'] = self._activation
+ self._default_dict['name'] = None
+ self._default_dict['dilation_rate'] = 1
return x
def _build_block(self, inputs, config, name):
x = inputs
i = 0
- self._default_dict["activation"] = self._get_activation(config.activation)
+ self._default_dict['activation'] = self._get_activation(config.activation)
while i < config.repetitions:
- self._default_dict["name"] = f"{name}_{i}"
+ self._default_dict['name'] = f'{name}_{i}'
layer = self._registry(config, self._default_dict)
x = layer(x)
i += 1
- self._default_dict["activation"] = self._activation
- self._default_dict["name"] = None
+ self._default_dict['activation'] = self._activation
+ self._default_dict['name'] = None
return x
@staticmethod
def get_model_config(name):
name = name.lower()
- backbone = BACKBONES[name]["backbone"]
- splits = BACKBONES[name]["splits"]
+ backbone = BACKBONES[name]['backbone']
+ splits = BACKBONES[name]['splits']
return build_block_specs(backbone), splits
@property
@@ -412,35 +644,41 @@ def from_config(cls, config, custom_objects=None):
def get_config(self):
layer_config = {
- "model_id": self._model_name,
- "min_level": self._min_size,
- "max_level": self._max_size,
- "kernel_initializer": self._kernel_initializer,
- "kernel_regularizer": self._kernel_regularizer,
- "bias_regularizer": self._bias_regularizer,
- "norm_momentum": self._norm_momentum,
- "norm_epsilon": self._norm_epislon,
- "use_sync_bn": self._use_sync_bn,
- "activation": self._activation
+ 'model_id': self._model_name,
+ 'min_level': self._min_size,
+ 'max_level': self._max_size,
+ 'kernel_initializer': self._kernel_initializer,
+ 'kernel_regularizer': self._kernel_regularizer,
+ 'bias_regularizer': self._bias_regularizer,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epislon,
+ 'use_sync_bn': self._use_sync_bn,
+ 'activation': self._activation,
}
return layer_config
-@factory.register_backbone_builder("darknet")
+@factory.register_backbone_builder('darknet')
def build_darknet(
input_specs: tf.keras.layers.InputSpec,
backbone_config: hyperparams.Config,
norm_activation_config: hyperparams.Config,
l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model:
- """Builds darknet backbone."""
+ """Builds darknet."""
backbone_cfg = backbone_config.get()
model = Darknet(
model_id=backbone_cfg.model_id,
- input_shape=input_specs,
+ min_level=backbone_cfg.min_level,
+ max_level=backbone_cfg.max_level,
+ input_specs=input_specs,
+ dilate=backbone_cfg.dilate,
+ width_scale=backbone_cfg.width_scale,
+ depth_scale=backbone_cfg.depth_scale,
activation=norm_activation_config.activation,
use_sync_bn=norm_activation_config.use_sync_bn,
norm_momentum=norm_activation_config.norm_momentum,
norm_epsilon=norm_activation_config.norm_epsilon,
kernel_regularizer=l2_regularizer)
+ model.summary()
return model
diff --git a/official/vision/beta/projects/yolo/modeling/backbones/darknet_test.py b/official/vision/beta/projects/yolo/modeling/backbones/darknet_test.py
index 76c595f2dd7..9441b06a311 100644
--- a/official/vision/beta/projects/yolo/modeling/backbones/darknet_test.py
+++ b/official/vision/beta/projects/yolo/modeling/backbones/darknet_test.py
@@ -13,7 +13,7 @@
# limitations under the License.
# Lint as: python3
-"""Tests for resnet."""
+"""Tests for yolo."""
from absl.testing import parameterized
import numpy as np
@@ -24,35 +24,48 @@
from official.vision.beta.projects.yolo.modeling.backbones import darknet
-class DarkNetTest(parameterized.TestCase, tf.test.TestCase):
+class DarknetTest(parameterized.TestCase, tf.test.TestCase):
@parameterized.parameters(
- (224, "darknet53", 2, 1),
- (224, "darknettiny", 1, 2),
- (224, "cspdarknettiny", 1, 1),
- (224, "cspdarknet53", 2, 1),
+ (224, 'darknet53', 2, 1, True),
+ (224, 'darknettiny', 1, 2, False),
+ (224, 'cspdarknettiny', 1, 1, False),
+ (224, 'cspdarknet53', 2, 1, True),
)
- def test_network_creation(self, input_size, model_id,
- endpoint_filter_scale, scale_final):
+ def test_network_creation(self, input_size, model_id, endpoint_filter_scale,
+ scale_final, dilate):
"""Test creation of ResNet family models."""
- tf.keras.backend.set_image_data_format("channels_last")
+ tf.keras.backend.set_image_data_format('channels_last')
- network = darknet.Darknet(model_id=model_id, min_level=3, max_level=5)
+ network = darknet.Darknet(
+ model_id=model_id, min_level=3, max_level=5, dilate=dilate)
self.assertEqual(network.model_id, model_id)
inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
endpoints = network(inputs)
- self.assertAllEqual(
- [1, input_size / 2**3, input_size / 2**3, 128 * endpoint_filter_scale],
- endpoints["3"].shape.as_list())
- self.assertAllEqual(
- [1, input_size / 2**4, input_size / 2**4, 256 * endpoint_filter_scale],
- endpoints["4"].shape.as_list())
- self.assertAllEqual([
- 1, input_size / 2**5, input_size / 2**5,
- 512 * endpoint_filter_scale * scale_final
- ], endpoints["5"].shape.as_list())
+ if dilate:
+ self.assertAllEqual([
+ 1, input_size / 2**3, input_size / 2**3, 128 * endpoint_filter_scale
+ ], endpoints['3'].shape.as_list())
+ self.assertAllEqual([
+ 1, input_size / 2**3, input_size / 2**3, 256 * endpoint_filter_scale
+ ], endpoints['4'].shape.as_list())
+ self.assertAllEqual([
+ 1, input_size / 2**3, input_size / 2**3,
+ 512 * endpoint_filter_scale * scale_final
+ ], endpoints['5'].shape.as_list())
+ else:
+ self.assertAllEqual([
+ 1, input_size / 2**3, input_size / 2**3, 128 * endpoint_filter_scale
+ ], endpoints['3'].shape.as_list())
+ self.assertAllEqual([
+ 1, input_size / 2**4, input_size / 2**4, 256 * endpoint_filter_scale
+ ], endpoints['4'].shape.as_list())
+ self.assertAllEqual([
+ 1, input_size / 2**5, input_size / 2**5,
+ 512 * endpoint_filter_scale * scale_final
+ ], endpoints['5'].shape.as_list())
@combinations.generate(
combinations.combine(
@@ -66,20 +79,20 @@ def test_sync_bn_multiple_devices(self, strategy, use_sync_bn):
"""Test for sync bn on TPU and GPU devices."""
inputs = np.random.rand(1, 224, 224, 3)
- tf.keras.backend.set_image_data_format("channels_last")
+ tf.keras.backend.set_image_data_format('channels_last')
with strategy.scope():
- network = darknet.Darknet(model_id="darknet53", min_size=3, max_size=5)
+ network = darknet.Darknet(model_id='darknet53', min_size=3, max_size=5)
_ = network(inputs)
@parameterized.parameters(1, 3, 4)
def test_input_specs(self, input_dim):
"""Test different input feature dimensions."""
- tf.keras.backend.set_image_data_format("channels_last")
+ tf.keras.backend.set_image_data_format('channels_last')
input_specs = tf.keras.layers.InputSpec(shape=[None, None, None, input_dim])
network = darknet.Darknet(
- model_id="darknet53", min_level=3, max_level=5, input_specs=input_specs)
+ model_id='darknet53', min_level=3, max_level=5, input_specs=input_specs)
inputs = tf.keras.Input(shape=(224, 224, input_dim), batch_size=1)
_ = network(inputs)
@@ -87,14 +100,14 @@ def test_input_specs(self, input_dim):
def test_serialize_deserialize(self):
# Create a network object that sets all of its config options.
kwargs = dict(
- model_id="darknet53",
+ model_id='darknet53',
min_level=3,
max_level=5,
use_sync_bn=False,
- activation="relu",
+ activation='relu',
norm_momentum=0.99,
norm_epsilon=0.001,
- kernel_initializer="VarianceScaling",
+ kernel_initializer='VarianceScaling',
kernel_regularizer=None,
bias_regularizer=None,
)
@@ -113,5 +126,5 @@ def test_serialize_deserialize(self):
self.assertAllEqual(network.get_config(), new_network.get_config())
-if __name__ == "__main__":
+if __name__ == '__main__':
tf.test.main()
diff --git a/official/vision/beta/projects/yolo/modeling/decoders/__init__.py b/official/vision/beta/projects/yolo/modeling/decoders/__init__.py
new file mode 100644
index 00000000000..e419af524b5
--- /dev/null
+++ b/official/vision/beta/projects/yolo/modeling/decoders/__init__.py
@@ -0,0 +1,14 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
diff --git a/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder.py b/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder.py
new file mode 100644
index 00000000000..40f71009f67
--- /dev/null
+++ b/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder.py
@@ -0,0 +1,478 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+# Lint as: python3
+"""Feature Pyramid Network and Path Aggregation variants used in YOLO."""
+
+import tensorflow as tf
+from official.vision.beta.projects.yolo.modeling.layers import nn_blocks
+
+
+@tf.keras.utils.register_keras_serializable(package='yolo')
+class _IdentityRoute(tf.keras.layers.Layer):
+
+ def call(self, inputs):
+ return None, inputs
+
+
+@tf.keras.utils.register_keras_serializable(package='yolo')
+class YoloFPN(tf.keras.layers.Layer):
+ """YOLO Feature pyramid network."""
+
+ def __init__(self,
+ fpn_depth=4,
+ use_spatial_attention=False,
+ csp_stack=False,
+ activation='leaky',
+ fpn_filter_scale=1,
+ use_sync_bn=False,
+ norm_momentum=0.99,
+ norm_epsilon=0.001,
+ kernel_initializer='glorot_uniform',
+ kernel_regularizer=None,
+ bias_regularizer=None,
+ **kwargs):
+ """Yolo FPN initialization function (Yolo V4).
+
+ Args:
+ fpn_depth: `int`, number of layers to use in each FPN path
+ if you choose to use an FPN.
+ use_spatial_attention: `bool`, use the spatial attention module.
+ csp_stack: `bool`, CSPize the FPN.
+ activation: `str`, the activation function to use typically leaky or mish.
+ fpn_filter_scale: `int`, scaling factor for the FPN filters.
+ use_sync_bn: if True, use synchronized batch normalization.
+ norm_momentum: `float`, normalization momentum for the moving average.
+ norm_epsilon: `float`, small float added to variance to avoid dividing by
+ zero.
+ kernel_initializer: kernel_initializer for convolutional layers.
+ kernel_regularizer: tf.keras.regularizers.Regularizer object for Conv2D.
+ bias_regularizer: tf.keras.regularizers.Regularizer object for Conv2D.
+ **kwargs: keyword arguments to be passed.
+ """
+
+ super().__init__(**kwargs)
+ self._fpn_depth = fpn_depth
+
+ self._activation = activation
+ self._use_sync_bn = use_sync_bn
+ self._norm_momentum = norm_momentum
+ self._norm_epsilon = norm_epsilon
+ self._kernel_initializer = kernel_initializer
+ self._kernel_regularizer = kernel_regularizer
+ self._bias_regularizer = bias_regularizer
+ self._use_spatial_attention = use_spatial_attention
+ self._filter_scale = fpn_filter_scale
+ self._csp_stack = csp_stack
+
+ self._base_config = dict(
+ activation=self._activation,
+ use_sync_bn=self._use_sync_bn,
+ kernel_regularizer=self._kernel_regularizer,
+ kernel_initializer=self._kernel_initializer,
+ bias_regularizer=self._bias_regularizer,
+ norm_epsilon=self._norm_epsilon,
+ norm_momentum=self._norm_momentum)
+
+ def get_raw_depths(self, minimum_depth, inputs):
+ """Calculates the unscaled depths of the FPN branches.
+
+ Args:
+ minimum_depth (int): depth of the smallest branch of the FPN.
+ inputs (dict): dictionary of the shape of input args as a dictionary of
+ lists.
+
+ Returns:
+ The unscaled depths of the FPN branches.
+ """
+
+ depths = []
+ for i in range(self._min_level, self._max_level + 1):
+ depths.append(inputs[str(i)][-1] / self._filter_scale)
+ return list(reversed(depths))
+
+ def build(self, inputs):
+ """Use config dictionary to generate all important attributes for head.
+
+ Args:
+ inputs: dictionary of the shape of input args as a dictionary of lists.
+ """
+
+ keys = [int(key) for key in inputs.keys()]
+ self._min_level = min(keys)
+ self._max_level = max(keys)
+ self._min_depth = inputs[str(self._min_level)][-1]
+ self._depths = self.get_raw_depths(self._min_depth, inputs)
+
+ # directly connect to an input path and process it
+ self.preprocessors = dict()
+ # resample an input and merge it with the output of another path
+ # inorder to aggregate backbone outputs
+ self.resamples = dict()
+ # set of convoltion layers and upsample layers that are used to
+ # prepare the FPN processors for output
+
+ for level, depth in zip(
+ reversed(range(self._min_level, self._max_level + 1)), self._depths):
+ if level == self._min_level:
+ self.resamples[str(level)] = nn_blocks.PathAggregationBlock(
+ filters=depth // 2,
+ inverted=True,
+ upsample=True,
+ drop_final=self._csp_stack == 0,
+ upsample_size=2,
+ **self._base_config)
+ self.preprocessors[str(level)] = _IdentityRoute()
+ elif level != self._max_level:
+ self.resamples[str(level)] = nn_blocks.PathAggregationBlock(
+ filters=depth // 2,
+ inverted=True,
+ upsample=True,
+ drop_final=False,
+ upsample_size=2,
+ **self._base_config)
+ self.preprocessors[str(level)] = nn_blocks.DarkRouteProcess(
+ filters=depth,
+ repetitions=self._fpn_depth - int(level == self._min_level),
+ block_invert=True,
+ insert_spp=False,
+ csp_stack=self._csp_stack,
+ **self._base_config)
+ else:
+ self.preprocessors[str(level)] = nn_blocks.DarkRouteProcess(
+ filters=depth,
+ repetitions=self._fpn_depth + 1 * int(self._csp_stack == 0),
+ insert_spp=True,
+ block_invert=False,
+ csp_stack=self._csp_stack,
+ **self._base_config)
+
+ def call(self, inputs):
+ outputs = dict()
+ layer_in = inputs[str(self._max_level)]
+ for level in reversed(range(self._min_level, self._max_level + 1)):
+ _, x = self.preprocessors[str(level)](layer_in)
+ outputs[str(level)] = x
+ if level > self._min_level:
+ x_next = inputs[str(level - 1)]
+ _, layer_in = self.resamples[str(level - 1)]([x_next, x])
+ return outputs
+
+
+@tf.keras.utils.register_keras_serializable(package='yolo')
+class YoloPAN(tf.keras.layers.Layer):
+ """YOLO Path Aggregation Network."""
+
+ def __init__(self,
+ path_process_len=6,
+ max_level_process_len=None,
+ embed_spp=False,
+ use_spatial_attention=False,
+ csp_stack=False,
+ activation='leaky',
+ use_sync_bn=False,
+ norm_momentum=0.99,
+ norm_epsilon=0.001,
+ kernel_initializer='glorot_uniform',
+ kernel_regularizer=None,
+ bias_regularizer=None,
+ fpn_input=True,
+ fpn_filter_scale=1.0,
+ **kwargs):
+ """Yolo Path Aggregation Network initialization function (Yolo V3 and V4).
+
+ Args:
+ path_process_len: `int`, number of layers ot use in each Decoder path.
+ max_level_process_len: `int`, number of layers ot use in the largest
+ processing path, or the backbones largest output if it is different.
+ embed_spp: `bool`, use the SPP found in the YoloV3 and V4 model.
+ use_spatial_attention: `bool`, use the spatial attention module.
+ csp_stack: `bool`, CSPize the FPN.
+ activation: `str`, the activation function to use typically leaky or mish.
+ use_sync_bn: if True, use synchronized batch normalization.
+ norm_momentum: `float`, normalization omentum for the moving average.
+ norm_epsilon: `float`, small float added to variance to avoid dividing
+ by zero.
+ kernel_initializer: kernel_initializer for convolutional layers.
+ kernel_regularizer: tf.keras.regularizers.Regularizer object for Conv2D.
+ bias_regularizer: tf.keras.regularizers.Regularizer object for Conv2d.
+ fpn_input: `bool`, for whether the input into this fucntion is an FPN or
+ a backbone.
+ fpn_filter_scale: `int`, scaling factor for the FPN filters.
+ **kwargs: keyword arguments to be passed.
+ """
+
+ super().__init__(**kwargs)
+
+ self._path_process_len = path_process_len
+ self._embed_spp = embed_spp
+ self._use_spatial_attention = use_spatial_attention
+
+ self._activation = activation
+ self._use_sync_bn = use_sync_bn
+ self._norm_momentum = norm_momentum
+ self._norm_epsilon = norm_epsilon
+ self._kernel_initializer = kernel_initializer
+ self._kernel_regularizer = kernel_regularizer
+ self._bias_regularizer = bias_regularizer
+ self._fpn_input = fpn_input
+ self._max_level_process_len = max_level_process_len
+ self._csp_stack = csp_stack
+ self._fpn_filter_scale = fpn_filter_scale
+
+ if max_level_process_len is None:
+ self._max_level_process_len = path_process_len
+
+ self._base_config = dict(
+ activation=self._activation,
+ use_sync_bn=self._use_sync_bn,
+ kernel_regularizer=self._kernel_regularizer,
+ kernel_initializer=self._kernel_initializer,
+ bias_regularizer=self._bias_regularizer,
+ norm_epsilon=self._norm_epsilon,
+ norm_momentum=self._norm_momentum)
+
+ def build(self, inputs):
+ """Use config dictionary to generate all important attributes for head.
+
+ Args:
+ inputs: dictionary of the shape of input args as a dictionary of lists.
+ """
+
+ # define the key order
+ keys = [int(key) for key in inputs.keys()]
+ self._min_level = min(keys)
+ self._max_level = max(keys)
+ self._min_depth = inputs[str(self._min_level)][-1]
+ self._depths = self.get_raw_depths(self._min_depth, inputs)
+
+ # directly connect to an input path and process it
+ self.preprocessors = dict()
+ # resample an input and merge it with the output of another path
+ # inorder to aggregate backbone outputs
+ self.resamples = dict()
+
+ # FPN will reverse the key process order for the backbone, so we need
+ # adjust the order that objects are created and processed to adjust for
+ # this. not using an FPN will directly connect the decoder to the backbone
+ # therefore the object creation order needs to be done from the largest
+ # to smallest level.
+ if self._fpn_input:
+ # process order {... 3, 4, 5}
+ self._iterator = range(self._min_level, self._max_level + 1)
+ self._check = lambda x: x < self._max_level
+ self._key_shift = lambda x: x + 1
+ self._input = self._min_level
+ downsample = True
+ upsample = False
+ else:
+ # process order {5, 4, 3, ...}
+ self._iterator = list(
+ reversed(range(self._min_level, self._max_level + 1)))
+ self._check = lambda x: x > self._min_level
+ self._key_shift = lambda x: x - 1
+ self._input = self._max_level
+ downsample = False
+ upsample = True
+
+ if self._csp_stack == 0:
+ proc_filters = lambda x: x
+ resample_filters = lambda x: x // 2
+ else:
+ proc_filters = lambda x: x * 2
+ resample_filters = lambda x: x
+ for level, depth in zip(self._iterator, self._depths):
+ if level == self._input:
+ self.preprocessors[str(level)] = nn_blocks.DarkRouteProcess(
+ filters=proc_filters(depth),
+ repetitions=self._max_level_process_len,
+ insert_spp=self._embed_spp,
+ block_invert=False,
+ insert_sam=self._use_spatial_attention,
+ csp_stack=self._csp_stack,
+ **self._base_config)
+ else:
+ self.resamples[str(level)] = nn_blocks.PathAggregationBlock(
+ filters=resample_filters(depth),
+ upsample=upsample,
+ downsample=downsample,
+ inverted=False,
+ drop_final=self._csp_stack == 0,
+ **self._base_config)
+ self.preprocessors[str(level)] = nn_blocks.DarkRouteProcess(
+ filters=proc_filters(depth),
+ repetitions=self._path_process_len,
+ insert_spp=False,
+ insert_sam=self._use_spatial_attention,
+ csp_stack=self._csp_stack,
+ **self._base_config)
+
+ def get_raw_depths(self, minimum_depth, inputs):
+ """Calculates the unscaled depths of the FPN branches.
+
+ Args:
+ minimum_depth: `int` depth of the smallest branch of the FPN.
+ inputs: `dict[str, tf.InputSpec]` of the shape of input args as a
+ dictionary of lists.
+
+ Returns:
+ The unscaled depths of the FPN branches.
+ """
+
+ depths = []
+ if len(inputs.keys()) > 3 or self._fpn_filter_scale > 1:
+ for i in range(self._min_level, self._max_level + 1):
+ depths.append(inputs[str(i)][-1] * 2)
+ else:
+ for _ in range(self._min_level, self._max_level + 1):
+ depths.append(minimum_depth)
+ minimum_depth *= 2
+ if self._fpn_input:
+ return depths
+ return list(reversed(depths))
+
+ def call(self, inputs):
+ outputs = dict()
+ layer_in = inputs[str(self._input)]
+
+ for level in self._iterator:
+ x_route, x = self.preprocessors[str(level)](layer_in)
+ outputs[str(level)] = x
+ if self._check(level):
+ x_next = inputs[str(self._key_shift(level))]
+ _, layer_in = self.resamples[str(
+ self._key_shift(level))]([x_route, x_next])
+ return outputs
+
+
+@tf.keras.utils.register_keras_serializable(package='yolo')
+class YoloDecoder(tf.keras.Model):
+ """Darknet Backbone Decoder."""
+
+ def __init__(self,
+ input_specs,
+ use_fpn=False,
+ use_spatial_attention=False,
+ csp_stack=False,
+ fpn_depth=4,
+ fpn_filter_scale=1,
+ path_process_len=6,
+ max_level_process_len=None,
+ embed_spp=False,
+ activation='leaky',
+ use_sync_bn=False,
+ norm_momentum=0.99,
+ norm_epsilon=0.001,
+ kernel_initializer='glorot_uniform',
+ kernel_regularizer=None,
+ bias_regularizer=None,
+ **kwargs):
+ """Yolo Decoder initialization function.
+
+ A unified model that ties all decoder components into a conditionally build
+ YOLO decoder.
+
+ Args:
+ input_specs: `dict[str, tf.InputSpec]`: input specs of each of the inputs
+ to the heads.
+ use_fpn: `bool`, use the FPN found in the YoloV4 model.
+ use_spatial_attention: `bool`, use the spatial attention module.
+ csp_stack: `bool`, CSPize the FPN.
+ fpn_depth: `int`, number of layers ot use in each FPN path
+ if you choose to use an FPN.
+ fpn_filter_scale: `int`, scaling factor for the FPN filters.
+ path_process_len: `int`, number of layers ot use in each Decoder path.
+ max_level_process_len: `int`, number of layers ot use in the largest
+ processing path, or the backbones largest output if it is different.
+ embed_spp: `bool`, use the SPP found in the YoloV3 and V4 model.
+ activation: `str`, the activation function to use typically leaky or mish.
+ use_sync_bn: if True, use synchronized batch normalization.
+ norm_momentum: `float`, normalization omentum for the moving average.
+ norm_epsilon: `float`, small float added to variance to avoid dividing by
+ zero.
+ kernel_initializer: kernel_initializer for convolutional layers.
+ kernel_regularizer: tf.keras.regularizers.Regularizer object for Conv2D.
+ bias_regularizer: tf.keras.regularizers.Regularizer object for Conv2D.
+ **kwargs: keyword arguments to be passed.
+ """
+
+ self._input_specs = input_specs
+ self._use_fpn = use_fpn
+ self._fpn_depth = fpn_depth
+ self._path_process_len = path_process_len
+ self._max_level_process_len = max_level_process_len
+ self._embed_spp = embed_spp
+
+ self._activation = activation
+ self._use_sync_bn = use_sync_bn
+ self._norm_momentum = norm_momentum
+ self._norm_epsilon = norm_epsilon
+ self._kernel_initializer = kernel_initializer
+ self._kernel_regularizer = kernel_regularizer
+ self._bias_regularizer = bias_regularizer
+
+ self._base_config = dict(
+ use_spatial_attention=use_spatial_attention,
+ csp_stack=csp_stack,
+ activation=self._activation,
+ use_sync_bn=self._use_sync_bn,
+ fpn_filter_scale=fpn_filter_scale,
+ norm_momentum=self._norm_momentum,
+ norm_epsilon=self._norm_epsilon,
+ kernel_initializer=self._kernel_initializer,
+ kernel_regularizer=self._kernel_regularizer,
+ bias_regularizer=self._bias_regularizer)
+
+ self._decoder_config = dict(
+ path_process_len=self._path_process_len,
+ max_level_process_len=self._max_level_process_len,
+ embed_spp=self._embed_spp,
+ fpn_input=self._use_fpn,
+ **self._base_config)
+
+ inputs = {
+ key: tf.keras.layers.Input(shape=value[1:])
+ for key, value in input_specs.items()
+ }
+ if self._use_fpn:
+ inter_outs = YoloFPN(
+ fpn_depth=self._fpn_depth, **self._base_config)(
+ inputs)
+ outputs = YoloPAN(**self._decoder_config)(inter_outs)
+ else:
+ inter_outs = None
+ outputs = YoloPAN(**self._decoder_config)(inputs)
+
+ self._output_specs = {key: value.shape for key, value in outputs.items()}
+ super().__init__(inputs=inputs, outputs=outputs, name='YoloDecoder')
+
+ @property
+ def use_fpn(self):
+ return self._use_fpn
+
+ @property
+ def output_specs(self):
+ return self._output_specs
+
+ def get_config(self):
+ config = dict(
+ input_specs=self._input_specs,
+ use_fpn=self._use_fpn,
+ fpn_depth=self._fpn_depth,
+ **self._decoder_config)
+ return config
+
+ @classmethod
+ def from_config(cls, config, custom_objects=None):
+ return cls(**config)
diff --git a/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder_test.py b/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder_test.py
new file mode 100644
index 00000000000..611c4585945
--- /dev/null
+++ b/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder_test.py
@@ -0,0 +1,153 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+# Lint as: python3
+"""Tests for YOLO."""
+
+# Import libraries
+from absl.testing import parameterized
+import tensorflow as tf
+
+from tensorflow.python.distribute import combinations
+from tensorflow.python.distribute import strategy_combinations
+from official.vision.beta.projects.yolo.modeling.decoders import yolo_decoder as decoders
+
+
+class YoloDecoderTest(parameterized.TestCase, tf.test.TestCase):
+
+ def _build_yolo_decoder(self, input_specs, name='1'):
+ # Builds 4 different arbitrary decoders.
+ if name == '1':
+ model = decoders.YoloDecoder(
+ input_specs=input_specs,
+ embed_spp=False,
+ use_fpn=False,
+ max_level_process_len=2,
+ path_process_len=1,
+ activation='mish')
+ elif name == '6spp':
+ model = decoders.YoloDecoder(
+ input_specs=input_specs,
+ embed_spp=True,
+ use_fpn=False,
+ max_level_process_len=None,
+ path_process_len=6,
+ activation='mish')
+ elif name == '6sppfpn':
+ model = decoders.YoloDecoder(
+ input_specs=input_specs,
+ embed_spp=True,
+ use_fpn=True,
+ max_level_process_len=None,
+ path_process_len=6,
+ activation='mish')
+ elif name == '6':
+ model = decoders.YoloDecoder(
+ input_specs=input_specs,
+ embed_spp=False,
+ use_fpn=False,
+ max_level_process_len=None,
+ path_process_len=6,
+ activation='mish')
+ else:
+ raise NotImplementedError(f'YOLO decoder test {type} not implemented.')
+ return model
+
+ @parameterized.parameters('1', '6spp', '6sppfpn', '6')
+ def test_network_creation(self, version):
+ """Test creation of ResNet family models."""
+ tf.keras.backend.set_image_data_format('channels_last')
+ input_shape = {
+ '3': [1, 52, 52, 256],
+ '4': [1, 26, 26, 512],
+ '5': [1, 13, 13, 1024]
+ }
+ decoder = self._build_yolo_decoder(input_shape, version)
+
+ inputs = {}
+ for key in input_shape:
+ inputs[key] = tf.ones(input_shape[key], dtype=tf.float32)
+
+ endpoints = decoder.call(inputs)
+
+ for key in endpoints.keys():
+ self.assertAllEqual(endpoints[key].shape.as_list(), input_shape[key])
+
+ @combinations.generate(
+ combinations.combine(
+ strategy=[
+ strategy_combinations.cloud_tpu_strategy,
+ strategy_combinations.one_device_strategy_gpu,
+ ],
+ use_sync_bn=[False, True],
+ ))
+ def test_sync_bn_multiple_devices(self, strategy, use_sync_bn):
+ """Test for sync bn on TPU and GPU devices."""
+
+ tf.keras.backend.set_image_data_format('channels_last')
+
+ with strategy.scope():
+ input_shape = {
+ '3': [1, 52, 52, 256],
+ '4': [1, 26, 26, 512],
+ '5': [1, 13, 13, 1024]
+ }
+ decoder = self._build_yolo_decoder(input_shape, '6')
+
+ inputs = {}
+ for key in input_shape:
+ inputs[key] = tf.ones(input_shape[key], dtype=tf.float32)
+
+ _ = decoder.call(inputs)
+
+ @parameterized.parameters(1, 3, 4)
+ def test_input_specs(self, input_dim):
+ """Test different input feature dimensions."""
+ tf.keras.backend.set_image_data_format('channels_last')
+
+ input_shape = {
+ '3': [1, 52, 52, 256],
+ '4': [1, 26, 26, 512],
+ '5': [1, 13, 13, 1024]
+ }
+ decoder = self._build_yolo_decoder(input_shape, '6')
+
+ inputs = {}
+ for key in input_shape:
+ inputs[key] = tf.ones(input_shape[key], dtype=tf.float32)
+ _ = decoder(inputs)
+
+ def test_serialize_deserialize(self):
+ """Create a network object that sets all of its config options."""
+ tf.keras.backend.set_image_data_format('channels_last')
+
+ input_shape = {
+ '3': [1, 52, 52, 256],
+ '4': [1, 26, 26, 512],
+ '5': [1, 13, 13, 1024]
+ }
+ decoder = self._build_yolo_decoder(input_shape, '6')
+
+ inputs = {}
+ for key in input_shape:
+ inputs[key] = tf.ones(input_shape[key], dtype=tf.float32)
+
+ _ = decoder(inputs)
+ config = decoder.get_config()
+ decoder_from_config = decoders.YoloDecoder.from_config(config)
+ self.assertAllEqual(decoder.get_config(), decoder_from_config.get_config())
+
+
+if __name__ == '__main__':
+ tf.test.main()
diff --git a/official/vision/beta/projects/yolo/modeling/heads/__init__.py b/official/vision/beta/projects/yolo/modeling/heads/__init__.py
new file mode 100644
index 00000000000..e419af524b5
--- /dev/null
+++ b/official/vision/beta/projects/yolo/modeling/heads/__init__.py
@@ -0,0 +1,14 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
diff --git a/official/vision/beta/projects/yolo/modeling/heads/yolo_head.py b/official/vision/beta/projects/yolo/modeling/heads/yolo_head.py
new file mode 100644
index 00000000000..57c46c28ba1
--- /dev/null
+++ b/official/vision/beta/projects/yolo/modeling/heads/yolo_head.py
@@ -0,0 +1,122 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+# Lint as: python3
+"""Yolo heads."""
+
+import tensorflow as tf
+from official.vision.beta.projects.yolo.modeling.layers import nn_blocks
+
+
+class YoloHead(tf.keras.layers.Layer):
+ """YOLO Prediction Head."""
+
+ def __init__(self,
+ min_level,
+ max_level,
+ classes=80,
+ boxes_per_level=3,
+ output_extras=0,
+ norm_momentum=0.99,
+ norm_epsilon=0.001,
+ kernel_initializer='glorot_uniform',
+ kernel_regularizer=None,
+ bias_regularizer=None,
+ activation=None,
+ **kwargs):
+ """Yolo Prediction Head initialization function.
+
+ Args:
+ min_level: `int`, the minimum backbone output level.
+ max_level: `int`, the maximum backbone output level.
+ classes: `int`, number of classes per category.
+ boxes_per_level: `int`, number of boxes to predict per level.
+ output_extras: `int`, number of additional output channels that the head.
+ should predict for non-object detection and non-image classification
+ tasks.
+ norm_momentum: `float`, normalization momentum for the moving average.
+ norm_epsilon: `float`, small float added to variance to avoid dividing by
+ zero.
+ kernel_initializer: kernel_initializer for convolutional layers.
+ kernel_regularizer: tf.keras.regularizers.Regularizer object for Conv2D.
+ bias_regularizer: tf.keras.regularizers.Regularizer object for Conv2d.
+ activation: `str`, the activation function to use typically leaky or mish.
+ **kwargs: keyword arguments to be passed.
+ """
+
+ super().__init__(**kwargs)
+ self._min_level = min_level
+ self._max_level = max_level
+
+ self._key_list = [
+ str(key) for key in range(self._min_level, self._max_level + 1)
+ ]
+
+ self._classes = classes
+ self._boxes_per_level = boxes_per_level
+ self._output_extras = output_extras
+
+ self._output_conv = (classes + output_extras + 5) * boxes_per_level
+
+ self._base_config = dict(
+ activation=activation,
+ norm_momentum=norm_momentum,
+ norm_epsilon=norm_epsilon,
+ kernel_initializer=kernel_initializer,
+ kernel_regularizer=kernel_regularizer,
+ bias_regularizer=bias_regularizer)
+
+ self._conv_config = dict(
+ filters=self._output_conv,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ padding='same',
+ use_bn=False,
+ **self._base_config)
+
+ def build(self, input_shape):
+ self._head = dict()
+ for key in self._key_list:
+ self._head[key] = nn_blocks.ConvBN(**self._conv_config)
+
+ def call(self, inputs):
+ outputs = dict()
+ for key in self._key_list:
+ outputs[key] = self._head[key](inputs[key])
+ return outputs
+
+ @property
+ def output_depth(self):
+ return (self._classes + self._output_extras + 5) * self._boxes_per_level
+
+ @property
+ def num_boxes(self):
+ if self._min_level is None or self._max_level is None:
+ raise Exception(
+ 'Model has to be built before number of boxes can be determined.')
+ return (self._max_level - self._min_level + 1) * self._boxes_per_level
+
+ def get_config(self):
+ config = dict(
+ min_level=self._min_level,
+ max_level=self._max_level,
+ classes=self._classes,
+ boxes_per_level=self._boxes_per_level,
+ output_extras=self._output_extras,
+ **self._base_config)
+ return config
+
+ @classmethod
+ def from_config(cls, config, custom_objects=None):
+ return cls(**config)
diff --git a/official/vision/beta/projects/yolo/modeling/heads/yolo_head_test.py b/official/vision/beta/projects/yolo/modeling/heads/yolo_head_test.py
new file mode 100644
index 00000000000..8c5414e5d84
--- /dev/null
+++ b/official/vision/beta/projects/yolo/modeling/heads/yolo_head_test.py
@@ -0,0 +1,74 @@
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+# Lint as: python3
+"""Tests for yolo heads."""
+
+# Import libraries
+from absl.testing import parameterized
+import tensorflow as tf
+
+from official.vision.beta.projects.yolo.modeling.heads import yolo_head as heads
+
+
+class YoloDecoderTest(parameterized.TestCase, tf.test.TestCase):
+
+ def test_network_creation(self):
+ """Test creation of YOLO family models."""
+ tf.keras.backend.set_image_data_format('channels_last')
+ input_shape = {
+ '3': [1, 52, 52, 256],
+ '4': [1, 26, 26, 512],
+ '5': [1, 13, 13, 1024]
+ }
+ classes = 100
+ bps = 3
+ head = heads.YoloHead(3, 5, classes=classes, boxes_per_level=bps)
+
+ inputs = {}
+ for key in input_shape:
+ inputs[key] = tf.ones(input_shape[key], dtype=tf.float32)
+
+ endpoints = head(inputs)
+ # print(endpoints)
+
+ for key in endpoints.keys():
+ expected_input_shape = input_shape[key]
+ expected_input_shape[-1] = (classes + 5) * bps
+ self.assertAllEqual(endpoints[key].shape.as_list(), expected_input_shape)
+
+ def test_serialize_deserialize(self):
+ # Create a network object that sets all of its config options.
+ tf.keras.backend.set_image_data_format('channels_last')
+ input_shape = {
+ '3': [1, 52, 52, 256],
+ '4': [1, 26, 26, 512],
+ '5': [1, 13, 13, 1024]
+ }
+ classes = 100
+ bps = 3
+ head = heads.YoloHead(3, 5, classes=classes, boxes_per_level=bps)
+
+ inputs = {}
+ for key in input_shape:
+ inputs[key] = tf.ones(input_shape[key], dtype=tf.float32)
+
+ _ = head(inputs)
+ configs = head.get_config()
+ head_from_config = heads.YoloHead.from_config(configs)
+ self.assertAllEqual(head.get_config(), head_from_config.get_config())
+
+
+if __name__ == '__main__':
+ tf.test.main()
diff --git a/official/vision/beta/projects/yolo/modeling/layers/nn_blocks.py b/official/vision/beta/projects/yolo/modeling/layers/nn_blocks.py
index 8bc6a78078a..119ddd1c22c 100644
--- a/official/vision/beta/projects/yolo/modeling/layers/nn_blocks.py
+++ b/official/vision/beta/projects/yolo/modeling/layers/nn_blocks.py
@@ -13,81 +13,85 @@
# limitations under the License.
# Lint as: python3
-
"""Contains common building blocks for yolo neural networks."""
from typing import Callable, List
import tensorflow as tf
from official.modeling import tf_utils
+from official.vision.beta.ops import spatial_transform_ops
-@tf.keras.utils.register_keras_serializable(package="yolo")
+@tf.keras.utils.register_keras_serializable(package='yolo')
class Identity(tf.keras.layers.Layer):
def call(self, inputs):
return inputs
-@tf.keras.utils.register_keras_serializable(package="yolo")
+@tf.keras.utils.register_keras_serializable(package='yolo')
class ConvBN(tf.keras.layers.Layer):
- """Modified Convolution layer to match that of the DarkNet Library.
+ """ConvBN block.
+ Modified Convolution layer to match that of the Darknet Library.
The Layer is a standards combination of Conv BatchNorm Activation,
- however, the use of bias in the conv is determined by the use of batch norm.
-
+ however, the use of bias in the conv is determined by the use of batch
+ normalization.
Cross Stage Partial networks (CSPNets) were proposed in:
- [1] Chien-Yao Wang, Hong-Yuan Mark Liao, I-Hau Yeh, Yueh-Hua Wu, Ping-Yang
- Chen, Jun-Wei Hsieh.
- CSPNet: A New Backbone that can Enhance Learning Capability of CNN.
- arXiv:1911.11929
+ [1] Chien-Yao Wang, Hong-Yuan Mark Liao, I-Hau Yeh, Yueh-Hua Wu,
+ Ping-Yang Chen, Jun-Wei Hsieh
+ CSPNet: A New Backbone that can Enhance Learning Capability of CNN.
+ arXiv:1911.11929
"""
def __init__(self,
filters=1,
kernel_size=(1, 1),
strides=(1, 1),
- padding="same",
+ padding='same',
dilation_rate=(1, 1),
- kernel_initializer="glorot_uniform",
- bias_initializer="zeros",
- kernel_regularizer=None,
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
bias_regularizer=None,
+ kernel_regularizer=None,
use_bn=True,
use_sync_bn=False,
norm_momentum=0.99,
norm_epsilon=0.001,
- activation="leaky",
+ activation='leaky',
leaky_alpha=0.1,
**kwargs):
- """Initializes ConvBN layer.
+ """ConvBN initializer.
Args:
- filters: integer for output depth, or the number of features to learn
+ filters: integer for output depth, or the number of features to learn.
kernel_size: integer or tuple for the shape of the weight matrix or kernel
to learn.
strides: integer of tuple how much to move the kernel after each kernel
- use padding: string 'valid' or 'same', if same, then pad the image, else
- do not.
- padding: `str`, padding method for conv layers.
+ use.
+ padding: string 'valid' or 'same', if same, then pad the image, else do
+ not.
dilation_rate: tuple to indicate how much to modulate kernel weights and
- how many pixels in a feature map to skip.
+ how many pixels in a feature map to skip.
kernel_initializer: string to indicate which function to use to initialize
weights.
bias_initializer: string to indicate which function to use to initialize
bias.
- kernel_regularizer: string to indicate which function to use to
- regularizer weights.
bias_regularizer: string to indicate which function to use to regularizer
bias.
+ kernel_regularizer: string to indicate which function to use to
+ regularizer weights.
use_bn: boolean for whether to use batch normalization.
- use_sync_bn: boolean for whether sync batch normalization.
- norm_momentum: float for moment to use for batch normalization
- norm_epsilon: float for batch normalization epsilon
+ use_sync_bn: boolean for whether sync batch normalization statistics
+ of all batch norm layers to the models global statistics
+ (across all input batches).
+ norm_momentum: float for moment to use for batch normalization.
+ norm_epsilon: float for batch normalization epsilon.
activation: string or None for activation function to use in layer,
- if None activation is replaced by linear.
+ if None activation is replaced by linear.
leaky_alpha: float to use as alpha if activation function is leaky.
- **kwargs: Keyword Arguments
+ **kwargs: Keyword Arguments.
"""
+
# convolution params
self._filters = filters
self._kernel_size = kernel_size
@@ -97,15 +101,16 @@ def __init__(self,
self._kernel_initializer = kernel_initializer
self._bias_initializer = bias_initializer
self._kernel_regularizer = kernel_regularizer
+
self._bias_regularizer = bias_regularizer
# batch normalization params
self._use_bn = use_bn
self._use_sync_bn = use_sync_bn
- self._norm_moment = norm_momentum
+ self._norm_momentum = norm_momentum
self._norm_epsilon = norm_epsilon
- if tf.keras.backend.image_data_format() == "channels_last":
+ if tf.keras.backend.image_data_format() == 'channels_last':
# format: (batch_size, height, width, channels)
self._bn_axis = -1
else:
@@ -116,7 +121,7 @@ def __init__(self,
self._activation = activation
self._leaky_alpha = leaky_alpha
- super(ConvBN, self).__init__(**kwargs)
+ super().__init__(**kwargs)
def build(self, input_shape):
use_bias = not self._use_bn
@@ -136,101 +141,103 @@ def build(self, input_shape):
if self._use_bn:
if self._use_sync_bn:
self.bn = tf.keras.layers.experimental.SyncBatchNormalization(
- momentum=self._norm_moment,
+ momentum=self._norm_momentum,
epsilon=self._norm_epsilon,
axis=self._bn_axis)
else:
self.bn = tf.keras.layers.BatchNormalization(
- momentum=self._norm_moment,
+ momentum=self._norm_momentum,
epsilon=self._norm_epsilon,
axis=self._bn_axis)
- else:
- self.bn = Identity()
- if self._activation == "leaky":
+ if self._activation == 'leaky':
self._activation_fn = tf.keras.layers.LeakyReLU(alpha=self._leaky_alpha)
- elif self._activation == "mish":
+ elif self._activation == 'mish':
self._activation_fn = lambda x: x * tf.math.tanh(tf.math.softplus(x))
else:
self._activation_fn = tf_utils.get_activation(self._activation)
def call(self, x):
x = self.conv(x)
- x = self.bn(x)
+ if self._use_bn:
+ x = self.bn(x)
x = self._activation_fn(x)
return x
def get_config(self):
# used to store/share parameters to reconstruct the model
layer_config = {
- "filters": self._filters,
- "kernel_size": self._kernel_size,
- "strides": self._strides,
- "padding": self._padding,
- "dilation_rate": self._dilation_rate,
- "kernel_initializer": self._kernel_initializer,
- "bias_initializer": self._bias_initializer,
- "bias_regularizer": self._bias_regularizer,
- "kernel_regularizer": self._kernel_regularizer,
- "use_bn": self._use_bn,
- "use_sync_bn": self._use_sync_bn,
- "norm_moment": self._norm_moment,
- "norm_epsilon": self._norm_epsilon,
- "activation": self._activation,
- "leaky_alpha": self._leaky_alpha
+ 'filters': self._filters,
+ 'kernel_size': self._kernel_size,
+ 'strides': self._strides,
+ 'padding': self._padding,
+ 'dilation_rate': self._dilation_rate,
+ 'kernel_initializer': self._kernel_initializer,
+ 'bias_initializer': self._bias_initializer,
+ 'bias_regularizer': self._bias_regularizer,
+ 'kernel_regularizer': self._kernel_regularizer,
+ 'use_bn': self._use_bn,
+ 'use_sync_bn': self._use_sync_bn,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epsilon,
+ 'activation': self._activation,
+ 'leaky_alpha': self._leaky_alpha
}
- layer_config.update(super(ConvBN, self).get_config())
+ layer_config.update(super().get_config())
return layer_config
- def __repr__(self):
- return repr(self.get_config())
-
-@tf.keras.utils.register_keras_serializable(package="yolo")
+@tf.keras.utils.register_keras_serializable(package='yolo')
class DarkResidual(tf.keras.layers.Layer):
- """DarkNet block with Residual connection for Yolo v3 Backbone.
- """
+ """Darknet block with Residual connection for Yolo v3 Backbone."""
def __init__(self,
filters=1,
filter_scale=2,
- kernel_initializer="glorot_uniform",
- bias_initializer="zeros",
+ dilation_rate=1,
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
kernel_regularizer=None,
bias_regularizer=None,
use_bn=True,
use_sync_bn=False,
norm_momentum=0.99,
norm_epsilon=0.001,
- activation="leaky",
+ activation='leaky',
leaky_alpha=0.1,
- sc_activation="linear",
+ sc_activation='linear',
downsample=False,
**kwargs):
- """Initializes DarkResidual.
+ """Dark Residual initializer.
Args:
filters: integer for output depth, or the number of features to learn.
- filter_scale: `int`, scale factor for number of filters.
+ filter_scale: `int` for filter scale.
+ dilation_rate: tuple to indicate how much to modulate kernel weights and
+ how many pixels in a feature map to skip.
kernel_initializer: string to indicate which function to use to initialize
- weights
+ weights.
bias_initializer: string to indicate which function to use to initialize
- bias
+ bias.
kernel_regularizer: string to indicate which function to use to
- regularizer weights
+ regularizer weights.
bias_regularizer: string to indicate which function to use to regularizer
- bias
- use_bn: boolean for whether to use batch normalization
- use_sync_bn: boolean for whether sync batch normalization.
- norm_momentum: float for moment to use for batch normalization
- norm_epsilon: float for batch normalization epsilon
- activation: string for activation function to use in conv layers.
- leaky_alpha: float to use as alpha if activation function is leaky
- sc_activation: string for activation function to use in layer
+ bias.
+ use_bn: boolean for whether to use batch normalization.
+ use_sync_bn: boolean for whether sync batch normalization statistics.
+ of all batch norm layers to the models global statistics
+ (across all input batches).
+ norm_momentum: float for moment to use for batch normalization.
+ norm_epsilon: float for batch normalization epsilon.
+ activation: string or None for activation function to use in layer,
+ if None activation is replaced by linear.
+ leaky_alpha: float to use as alpha if activation function is leaky.
+ sc_activation: string for activation function to use in layer.
downsample: boolean for if image input is larger than layer output, set
- downsample to True so the dimensions are forced to match
- **kwargs: Keyword Arguments
+ downsample to True so the dimensions are forced to match.
+ **kwargs: Keyword Arguments.
"""
+
# downsample
self._downsample = downsample
@@ -245,8 +252,10 @@ def __init__(self,
self._kernel_regularizer = kernel_regularizer
# normal params
- self._norm_moment = norm_momentum
+ self._norm_momentum = norm_momentum
self._norm_epsilon = norm_epsilon
+ self._dilation_rate = dilation_rate if isinstance(dilation_rate,
+ int) else dilation_rate[0]
# activation params
self._conv_activation = activation
@@ -256,138 +265,152 @@ def __init__(self,
super().__init__(**kwargs)
def build(self, input_shape):
- self._dark_conv_args = {
- "kernel_initializer": self._kernel_initializer,
- "bias_initializer": self._bias_initializer,
- "bias_regularizer": self._bias_regularizer,
- "use_bn": self._use_bn,
- "use_sync_bn": self._use_sync_bn,
- "norm_momentum": self._norm_moment,
- "norm_epsilon": self._norm_epsilon,
- "activation": self._conv_activation,
- "kernel_regularizer": self._kernel_regularizer,
- "leaky_alpha": self._leaky_alpha
+ dark_conv_args = {
+ 'kernel_initializer': self._kernel_initializer,
+ 'bias_initializer': self._bias_initializer,
+ 'bias_regularizer': self._bias_regularizer,
+ 'use_bn': self._use_bn,
+ 'use_sync_bn': self._use_sync_bn,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epsilon,
+ 'activation': self._conv_activation,
+ 'kernel_regularizer': self._kernel_regularizer,
+ 'leaky_alpha': self._leaky_alpha
}
if self._downsample:
+ if self._dilation_rate > 1:
+ dilation_rate = 1
+ if self._dilation_rate // 2 > 0:
+ dilation_rate = self._dilation_rate // 2
+ down_stride = 1
+ else:
+ dilation_rate = 1
+ down_stride = 2
+
self._dconv = ConvBN(
filters=self._filters,
kernel_size=(3, 3),
- strides=(2, 2),
- padding="same",
- **self._dark_conv_args)
- else:
- self._dconv = Identity()
+ strides=down_stride,
+ dilation_rate=dilation_rate,
+ padding='same',
+ **dark_conv_args)
self._conv1 = ConvBN(
filters=self._filters // self._filter_scale,
kernel_size=(1, 1),
strides=(1, 1),
- padding="same",
- **self._dark_conv_args)
+ padding='same',
+ **dark_conv_args)
self._conv2 = ConvBN(
filters=self._filters,
kernel_size=(3, 3),
strides=(1, 1),
- padding="same",
- **self._dark_conv_args)
+ dilation_rate=self._dilation_rate,
+ padding='same',
+ **dark_conv_args)
self._shortcut = tf.keras.layers.Add()
- if self._sc_activation == "leaky":
- self._activation_fn = tf.keras.layers.LeakyReLU(
- alpha=self._leaky_alpha)
- elif self._sc_activation == "mish":
+ if self._sc_activation == 'leaky':
+ self._activation_fn = tf.keras.layers.LeakyReLU(alpha=self._leaky_alpha)
+ elif self._sc_activation == 'mish':
self._activation_fn = lambda x: x * tf.math.tanh(tf.math.softplus(x))
else:
- self._activation_fn = tf_utils.get_activation(self._sc_activation)
+ self._activation_fn = tf_utils.get_activation(
+ self._sc_activation
+ )
super().build(input_shape)
- def call(self, inputs):
- shortcut = self._dconv(inputs)
- x = self._conv1(shortcut)
+ def call(self, inputs, training=None):
+ if self._downsample:
+ inputs = self._dconv(inputs)
+ x = self._conv1(inputs)
x = self._conv2(x)
- x = self._shortcut([x, shortcut])
+ x = self._shortcut([x, inputs])
return self._activation_fn(x)
def get_config(self):
# used to store/share parameters to reconstruct the model
layer_config = {
- "filters": self._filters,
- "kernel_initializer": self._kernel_initializer,
- "bias_initializer": self._bias_initializer,
- "kernel_regularizer": self._kernel_regularizer,
- "use_bn": self._use_bn,
- "use_sync_bn": self._use_sync_bn,
- "norm_moment": self._norm_moment,
- "norm_epsilon": self._norm_epsilon,
- "activation": self._conv_activation,
- "leaky_alpha": self._leaky_alpha,
- "sc_activation": self._sc_activation,
- "downsample": self._downsample
+ 'filters': self._filters,
+ 'kernel_initializer': self._kernel_initializer,
+ 'bias_initializer': self._bias_initializer,
+ 'kernel_regularizer': self._kernel_regularizer,
+ 'dilation_rate': self._dilation_rate,
+ 'use_bn': self._use_bn,
+ 'use_sync_bn': self._use_sync_bn,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epsilon,
+ 'activation': self._conv_activation,
+ 'leaky_alpha': self._leaky_alpha,
+ 'sc_activation': self._sc_activation,
+ 'downsample': self._downsample,
}
layer_config.update(super().get_config())
return layer_config
-@tf.keras.utils.register_keras_serializable(package="yolo")
+@tf.keras.utils.register_keras_serializable(package='yolo')
class CSPTiny(tf.keras.layers.Layer):
- """A Small size convolution block proposed in the CSPNet.
-
- The layer uses shortcuts, routing(concatnation), and feature grouping
- in order to improve gradient variablity and allow for high efficency, low
- power residual learning for small networtf.keras.
+ """CSP Tiny layer.
+ A Small size convolution block proposed in the CSPNet. The layer uses
+ shortcuts, routing(concatnation), and feature grouping in order to improve
+ gradient variablity and allow for high efficency, low power residual learning
+ for small networtf.keras.
Cross Stage Partial networks (CSPNets) were proposed in:
- [1] Chien-Yao Wang, Hong-Yuan Mark Liao, I-Hau Yeh, Yueh-Hua Wu, Ping-Yang
- Chen, Jun-Wei Hsieh
+ [1] Chien-Yao Wang, Hong-Yuan Mark Liao, I-Hau Yeh, Yueh-Hua Wu,
+ Ping-Yang Chen, Jun-Wei Hsieh
CSPNet: A New Backbone that can Enhance Learning Capability of CNN.
- arXiv:1911.11929
+ arXiv:1911.11929
"""
def __init__(self,
filters=1,
- kernel_initializer="glorot_uniform",
- bias_initializer="zeros",
- kernel_regularizer=None,
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
bias_regularizer=None,
+ kernel_regularizer=None,
use_bn=True,
+ dilation_rate=1,
use_sync_bn=False,
group_id=1,
groups=2,
norm_momentum=0.99,
norm_epsilon=0.001,
- activation="leaky",
+ activation='leaky',
downsample=True,
leaky_alpha=0.1,
**kwargs):
- """Initializes CSPTiny.
+ """Initializer for CSPTiny block.
Args:
- filters: integer for output depth, or the number of features to learn
+ filters: integer for output depth, or the number of features to learn.
kernel_initializer: string to indicate which function to use to initialize
- weights
+ weights.
bias_initializer: string to indicate which function to use to initialize
- bias
- kernel_regularizer: string to indicate which function to use to
- regularizer weights
+ bias.
bias_regularizer: string to indicate which function to use to regularizer
- bias
- use_bn: boolean for whether to use batch normalization
- use_sync_bn: boolean for whether sync batch normalization statistics of
- all batch norm layers to the models global statistics (across all input
- batches)
- group_id: integer for which group of features to pass through the csp tiny
- stack.
+ bias.
+ kernel_regularizer: string to indicate which function to use to
+ regularizer weights.
+ use_bn: boolean for whether to use batch normalization.
+ dilation_rate: `int`, dilation rate for conv layers.
+ use_sync_bn: boolean for whether sync batch normalization statistics
+ of all batch norm layers to the models global statistics
+ (across all input batches).
+ group_id: integer for which group of features to pass through the csp
+ tiny stack.
groups: integer for how many splits there should be in the convolution
- feature stack output
- norm_momentum: float for moment to use for batch normalization
- norm_epsilon: float for batch normalization epsilon
+ feature stack output.
+ norm_momentum: float for moment to use for batch normalization.
+ norm_epsilon: float for batch normalization epsilon.
activation: string or None for activation function to use in layer,
- if None activation is replaced by linear
+ if None activation is replaced by linear.
downsample: boolean for if image input is larger than layer output, set
- downsample to True so the dimensions are forced to match
- leaky_alpha: float to use as alpha if activation function is leaky
- **kwargs: Keyword Arguments
+ downsample to True so the dimensions are forced to match.
+ leaky_alpha: float to use as alpha if activation function is leaky.
+ **kwargs: Keyword Arguments.
"""
# ConvBN params
@@ -396,6 +419,7 @@ def __init__(self,
self._bias_initializer = bias_initializer
self._bias_regularizer = bias_regularizer
self._use_bn = use_bn
+ self._dilation_rate = dilation_rate
self._use_sync_bn = use_sync_bn
self._kernel_regularizer = kernel_regularizer
self._groups = groups
@@ -403,7 +427,7 @@ def __init__(self,
self._downsample = downsample
# normal params
- self._norm_moment = norm_momentum
+ self._norm_momentum = norm_momentum
self._norm_epsilon = norm_epsilon
# activation params
@@ -413,37 +437,37 @@ def __init__(self,
super().__init__(**kwargs)
def build(self, input_shape):
- self._dark_conv_args = {
- "kernel_initializer": self._kernel_initializer,
- "bias_initializer": self._bias_initializer,
- "bias_regularizer": self._bias_regularizer,
- "use_bn": self._use_bn,
- "use_sync_bn": self._use_sync_bn,
- "norm_momentum": self._norm_moment,
- "norm_epsilon": self._norm_epsilon,
- "activation": self._conv_activation,
- "kernel_regularizer": self._kernel_regularizer,
- "leaky_alpha": self._leaky_alpha
+ dark_conv_args = {
+ 'kernel_initializer': self._kernel_initializer,
+ 'bias_initializer': self._bias_initializer,
+ 'bias_regularizer': self._bias_regularizer,
+ 'use_bn': self._use_bn,
+ 'use_sync_bn': self._use_sync_bn,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epsilon,
+ 'activation': self._conv_activation,
+ 'kernel_regularizer': self._kernel_regularizer,
+ 'leaky_alpha': self._leaky_alpha
}
self._convlayer1 = ConvBN(
filters=self._filters,
kernel_size=(3, 3),
strides=(1, 1),
- padding="same",
- **self._dark_conv_args)
+ padding='same',
+ **dark_conv_args)
self._convlayer2 = ConvBN(
filters=self._filters // 2,
kernel_size=(3, 3),
strides=(1, 1),
- padding="same",
+ padding='same',
kernel_initializer=self._kernel_initializer,
bias_initializer=self._bias_initializer,
bias_regularizer=self._bias_regularizer,
kernel_regularizer=self._kernel_regularizer,
use_bn=self._use_bn,
use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_moment,
+ norm_momentum=self._norm_momentum,
norm_epsilon=self._norm_epsilon,
activation=self._conv_activation,
leaky_alpha=self._leaky_alpha)
@@ -452,22 +476,23 @@ def build(self, input_shape):
filters=self._filters // 2,
kernel_size=(3, 3),
strides=(1, 1),
- padding="same",
- **self._dark_conv_args)
+ padding='same',
+ **dark_conv_args)
self._convlayer4 = ConvBN(
filters=self._filters,
kernel_size=(1, 1),
strides=(1, 1),
- padding="same",
- **self._dark_conv_args)
+ padding='same',
+ **dark_conv_args)
- self._maxpool = tf.keras.layers.MaxPool2D(
- pool_size=2, strides=2, padding="same", data_format=None)
+ if self._downsample:
+ self._maxpool = tf.keras.layers.MaxPool2D(
+ pool_size=2, strides=2, padding='same', data_format=None)
super().build(input_shape)
- def call(self, inputs):
+ def call(self, inputs, training=None):
x1 = self._convlayer1(inputs)
x1_group = tf.split(x1, self._groups, axis=-1)[self._group_id]
x2 = self._convlayer2(x1_group) # grouping
@@ -479,276 +504,303 @@ def call(self, inputs):
x = self._maxpool(x)
return x, x5
- def get_config(self):
- # used to store/share parameters to reconsturct the model
- layer_config = {
- "filters": self._filters,
- "strides": self._strides,
- "kernel_initializer": self._kernel_initializer,
- "bias_initializer": self._bias_initializer,
- "kernel_regularizer": self._kernel_regularizer,
- "use_bn": self._use_bn,
- "use_sync_bn": self._use_sync_bn,
- "norm_moment": self._norm_moment,
- "norm_epsilon": self._norm_epsilon,
- "activation": self._conv_activation,
- "leaky_alpha": self._leaky_alpha,
- "sc_activation": self._sc_activation,
- }
- layer_config.update(super().get_config())
- return layer_config
-
-@tf.keras.utils.register_keras_serializable(package="yolo")
+@tf.keras.utils.register_keras_serializable(package='yolo')
class CSPRoute(tf.keras.layers.Layer):
- """Down sampling layer to take the place of down sampleing.
-
- It is applied in Residual networks. This is the first of 2 layers needed to
- convert any Residual Network model to a CSPNet. At the start of a new level
- change, this CSPRoute layer creates a learned identity that will act as a
- cross stage connection, that is used to inform the inputs to the next stage.
- It is called cross stage partial because the number of filters required in
- every intermitent Residual layer is reduced by half. The sister layer will
- take the partial generated by this layer and concatnate it with the output of
- the final residual layer in the stack to create a fully feature level output.
- This concatnation merges the partial blocks of 2 levels as input to the next
- allowing the gradients of each level to be more unique, and reducing the
- number of parameters required by each level by 50% while keeping accuracy
- consistent.
+ """CSPRoute block.
+
+ Down sampling layer to take the place of down sampleing done in Residual
+ networks. This is the first of 2 layers needed to convert any Residual Network
+ model to a CSPNet. At the start of a new level change, this CSPRoute layer
+ creates a learned identity that will act as a cross stage connection,
+ that is used to inform the inputs to the next stage. It is called cross stage
+ partial because the number of filters required in every intermitent Residual
+ layer is reduced by half. The sister layer will take the partial generated by
+ this layer and concatnate it with the output of the final residual layer in
+ the stack to create a fully feature level output. This concatnation merges the
+ partial blocks of 2 levels as input to the next allowing the gradients of each
+ level to be more unique, and reducing the number of parameters required by
+ each level by 50% while keeping accuracy consistent.
Cross Stage Partial networks (CSPNets) were proposed in:
- [1] Chien-Yao Wang, Hong-Yuan Mark Liao, I-Hau Yeh, Yueh-Hua Wu, Ping-Yang
- Chen, Jun-Wei Hsieh.
+ [1] Chien-Yao Wang, Hong-Yuan Mark Liao, I-Hau Yeh, Yueh-Hua Wu,
+ Ping-Yang Chen, Jun-Wei Hsieh
CSPNet: A New Backbone that can Enhance Learning Capability of CNN.
- arXiv:1911.11929
+ arXiv:1911.11929
"""
def __init__(self,
filters,
filter_scale=2,
- activation="mish",
- downsample=True,
- kernel_initializer="glorot_uniform",
- bias_initializer="zeros",
- kernel_regularizer=None,
+ activation='mish',
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
bias_regularizer=None,
+ kernel_regularizer=None,
+ dilation_rate=1,
use_bn=True,
use_sync_bn=False,
norm_momentum=0.99,
norm_epsilon=0.001,
+ downsample=True,
+ leaky_alpha=0.1,
**kwargs):
- """Initializes CSPRoute.
+ """CSPRoute layer initializer.
Args:
filters: integer for output depth, or the number of features to learn
filter_scale: integer dicating (filters//2) or the number of filters in
the partial feature stack.
- activation: string for activation function to use in layer
- downsample: down_sample the input.
- kernel_initializer: string to indicate which function to use to initialize
- weights.
+ activation: string for activation function to use in layer.
+ kernel_initializer: string to indicate which function to use to
+ initialize weights.
bias_initializer: string to indicate which function to use to initialize
bias.
- kernel_regularizer: string to indicate which function to use to
- regularizer weights.
bias_regularizer: string to indicate which function to use to regularizer
bias.
+ kernel_regularizer: string to indicate which function to use to
+ regularizer weights.
+ dilation_rate: dilation rate for conv layers.
use_bn: boolean for whether to use batch normalization.
- use_sync_bn: boolean for whether sync batch normalization.
- norm_momentum: float for moment to use for batch normalization
- norm_epsilon: float for batch normalization epsilon
- **kwargs: Keyword Arguments
+ use_sync_bn: boolean for whether sync batch normalization statistics
+ of all batch norm layers to the models global statistics
+ (across all input batches).
+ norm_momentum: float for moment to use for batch normalization.
+ norm_epsilon: float for batch normalization epsilon.
+ downsample: down_sample the input.
+ leaky_alpha: `float`, for leaky alpha value.
+ **kwargs: Keyword Arguments.
"""
super().__init__(**kwargs)
- # Layer params.
+ # layer params
self._filters = filters
self._filter_scale = filter_scale
self._activation = activation
- # Convoultion params.
+ # convoultion params
self._kernel_initializer = kernel_initializer
self._bias_initializer = bias_initializer
self._kernel_regularizer = kernel_regularizer
self._bias_regularizer = bias_regularizer
+ self._dilation_rate = dilation_rate
self._use_bn = use_bn
self._use_sync_bn = use_sync_bn
- self._norm_moment = norm_momentum
+ self._norm_momentum = norm_momentum
self._norm_epsilon = norm_epsilon
self._downsample = downsample
+ self._leaky_alpha = leaky_alpha
def build(self, input_shape):
- self._dark_conv_args = {
- "kernel_initializer": self._kernel_initializer,
- "bias_initializer": self._bias_initializer,
- "bias_regularizer": self._bias_regularizer,
- "use_bn": self._use_bn,
- "use_sync_bn": self._use_sync_bn,
- "norm_momentum": self._norm_moment,
- "norm_epsilon": self._norm_epsilon,
- "activation": self._activation,
- "kernel_regularizer": self._kernel_regularizer,
+ dark_conv_args = {
+ 'kernel_initializer': self._kernel_initializer,
+ 'bias_initializer': self._bias_initializer,
+ 'bias_regularizer': self._bias_regularizer,
+ 'use_bn': self._use_bn,
+ 'use_sync_bn': self._use_sync_bn,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epsilon,
+ 'activation': self._activation,
+ 'kernel_regularizer': self._kernel_regularizer,
+ 'leaky_alpha': self._leaky_alpha,
}
if self._downsample:
- self._conv1 = ConvBN(filters=self._filters,
- kernel_size=(3, 3),
- strides=(2, 2),
- **self._dark_conv_args)
- else:
- self._conv1 = ConvBN(filters=self._filters,
- kernel_size=(3, 3),
- strides=(1, 1),
- **self._dark_conv_args)
- self._conv2 = ConvBN(filters=self._filters // self._filter_scale,
- kernel_size=(1, 1),
- strides=(1, 1),
- **self._dark_conv_args)
-
- self._conv3 = ConvBN(filters=self._filters // self._filter_scale,
- kernel_size=(1, 1),
- strides=(1, 1),
- **self._dark_conv_args)
+ if self._dilation_rate > 1:
+ dilation_rate = 1
+ if self._dilation_rate // 2 > 0:
+ dilation_rate = self._dilation_rate // 2
+ down_stride = 1
+ else:
+ dilation_rate = 1
+ down_stride = 2
- def call(self, inputs):
- x = self._conv1(inputs)
- y = self._conv2(x)
- x = self._conv3(x)
+ self._conv1 = ConvBN(
+ filters=self._filters,
+ kernel_size=(3, 3),
+ strides=down_stride,
+ dilation_rate=dilation_rate,
+ **dark_conv_args)
+
+ self._conv2 = ConvBN(
+ filters=self._filters // self._filter_scale,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ **dark_conv_args)
+
+ self._conv3 = ConvBN(
+ filters=self._filters // self._filter_scale,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ **dark_conv_args)
+
+ def call(self, inputs, training=None):
+ if self._downsample:
+ inputs = self._conv1(inputs)
+ y = self._conv2(inputs)
+ x = self._conv3(inputs)
return (x, y)
-@tf.keras.utils.register_keras_serializable(package="yolo")
+@tf.keras.utils.register_keras_serializable(package='yolo')
class CSPConnect(tf.keras.layers.Layer):
- """Sister Layer to the CSPRoute layer.
-
- Merges the partial feature stacks generated by the CSPDownsampling layer,
- and the finaly output of the residual stack. Suggested in the CSPNet paper.
+ """CSPConnect block.
+ Sister Layer to the CSPRoute layer. Merges the partial feature stacks
+ generated by the CSPDownsampling layer, and the finaly output of the
+ residual stack. Suggested in the CSPNet paper.
Cross Stage Partial networks (CSPNets) were proposed in:
- [1] Chien-Yao Wang, Hong-Yuan Mark Liao, I-Hau Yeh, Yueh-Hua Wu, Ping-Yang
- Chen, Jun-Wei Hsieh.
+ [1] Chien-Yao Wang, Hong-Yuan Mark Liao, I-Hau Yeh, Yueh-Hua Wu,
+ Ping-Yang Chen, Jun-Wei Hsieh
CSPNet: A New Backbone that can Enhance Learning Capability of CNN.
- arXiv:1911.11929
+ arXiv:1911.11929
"""
def __init__(self,
filters,
filter_scale=2,
- activation="mish",
- kernel_initializer="glorot_uniform",
- bias_initializer="zeros",
- kernel_regularizer=None,
+ drop_final=False,
+ drop_first=False,
+ activation='mish',
+ kernel_size=(1, 1),
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
bias_regularizer=None,
+ kernel_regularizer=None,
+ dilation_rate=1,
use_bn=True,
use_sync_bn=False,
norm_momentum=0.99,
norm_epsilon=0.001,
+ leaky_alpha=0.1,
**kwargs):
- """Initializes CSPConnect.
+ """Initializer for CSPConnect block.
Args:
- filters: integer for output depth, or the number of features to learn.
+ filters: integer for output depth, or the number of features to learn
filter_scale: integer dicating (filters//2) or the number of filters in
the partial feature stack.
+ drop_final: `bool`, whether to drop final conv layer.
+ drop_first: `bool`, whether to drop first conv layer.
activation: string for activation function to use in layer.
+ kernel_size: `Tuple`, kernel size for conv layers.
kernel_initializer: string to indicate which function to use to initialize
weights.
bias_initializer: string to indicate which function to use to initialize
bias.
- kernel_regularizer: string to indicate which function to use to
- regularizer weights.
bias_regularizer: string to indicate which function to use to regularizer
bias.
+ kernel_regularizer: string to indicate which function to use to
+ regularizer weights.
+ dilation_rate: `int`, dilation rate for conv layers.
use_bn: boolean for whether to use batch normalization.
- use_sync_bn: boolean for whether sync batch normalization.
- norm_momentum: float for moment to use for batch normalization
- norm_epsilon: float for batch normalization epsilon
- **kwargs: Keyword Arguments
+ use_sync_bn: boolean for whether sync batch normalization statistics
+ of all batch norm layers to the models global
+ statistics (across all input batches).
+ norm_momentum: float for moment to use for batch normalization.
+ norm_epsilon: float for batch normalization epsilon.
+ leaky_alpha: `float`, for leaky alpha value.
+ **kwargs: Keyword Arguments.
"""
+
super().__init__(**kwargs)
- # layer params.
+ # layer params
self._filters = filters
self._filter_scale = filter_scale
self._activation = activation
- # Convoultion params.
+ # convoultion params
+ self._kernel_size = kernel_size
self._kernel_initializer = kernel_initializer
self._bias_initializer = bias_initializer
self._kernel_regularizer = kernel_regularizer
self._bias_regularizer = bias_regularizer
self._use_bn = use_bn
self._use_sync_bn = use_sync_bn
- self._norm_moment = norm_momentum
+ self._norm_momentum = norm_momentum
self._norm_epsilon = norm_epsilon
+ self._drop_final = drop_final
+ self._drop_first = drop_first
+ self._leaky_alpha = leaky_alpha
def build(self, input_shape):
- self._dark_conv_args = {
- "kernel_initializer": self._kernel_initializer,
- "bias_initializer": self._bias_initializer,
- "bias_regularizer": self._bias_regularizer,
- "use_bn": self._use_bn,
- "use_sync_bn": self._use_sync_bn,
- "norm_momentum": self._norm_moment,
- "norm_epsilon": self._norm_epsilon,
- "activation": self._activation,
- "kernel_regularizer": self._kernel_regularizer,
+ dark_conv_args = {
+ 'kernel_initializer': self._kernel_initializer,
+ 'bias_initializer': self._bias_initializer,
+ 'bias_regularizer': self._bias_regularizer,
+ 'use_bn': self._use_bn,
+ 'use_sync_bn': self._use_sync_bn,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epsilon,
+ 'activation': self._activation,
+ 'kernel_regularizer': self._kernel_regularizer,
+ 'leaky_alpha': self._leaky_alpha,
}
- self._conv1 = ConvBN(filters=self._filters // self._filter_scale,
- kernel_size=(1, 1),
- strides=(1, 1),
- **self._dark_conv_args)
+ if not self._drop_first:
+ self._conv1 = ConvBN(
+ filters=self._filters // self._filter_scale,
+ kernel_size=self._kernel_size,
+ strides=(1, 1),
+ **dark_conv_args)
self._concat = tf.keras.layers.Concatenate(axis=-1)
- self._conv2 = ConvBN(filters=self._filters,
- kernel_size=(1, 1),
- strides=(1, 1),
- **self._dark_conv_args)
- def call(self, inputs):
+ if not self._drop_final:
+ self._conv2 = ConvBN(
+ filters=self._filters,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ **dark_conv_args)
+
+ def call(self, inputs, training=None):
x_prev, x_csp = inputs
- x = self._conv1(x_prev)
- x = self._concat([x, x_csp])
- x = self._conv2(x)
+ if not self._drop_first:
+ x_prev = self._conv1(x_prev)
+ x = self._concat([x_prev, x_csp])
+
+ # skipped if drop final is true
+ if not self._drop_final:
+ x = self._conv2(x)
return x
class CSPStack(tf.keras.layers.Layer):
- """CSP full stack.
-
- Combines the route and the connect in case you dont want to just quickly wrap
- an existing callable or list of layers to make it a cross stage partial.
- Added for ease of use. you should be able to wrap any layer stack with a CSP
- independent of wether it belongs to the Darknet family. if filter_scale = 2,
- then the blocks in the stack passed into the the CSP stack should also have
- filters = filters/filter_scale.
-
+ """CSP Stack layer.
+
+ CSP full stack, combines the route and the connect in case you dont want to
+ jsut quickly wrap an existing callable or list of layers to
+ make it a cross stage partial. Added for ease of use. you should be able
+ to wrap any layer stack with a CSP independent of wether it belongs
+ to the Darknet family. if filter_scale = 2, then the blocks in the stack
+ passed into the the CSP stack should also have filters = filters/filter_scale
Cross Stage Partial networks (CSPNets) were proposed in:
- [1] Chien-Yao Wang, Hong-Yuan Mark Liao, I-Hau Yeh, Yueh-Hua Wu, Ping-Yang
- Chen, Jun-Wei Hsieh
+
+ [1] Chien-Yao Wang, Hong-Yuan Mark Liao, I-Hau Yeh, Yueh-Hua Wu,
+ Ping-Yang Chen, Jun-Wei Hsieh
CSPNet: A New Backbone that can Enhance Learning Capability of CNN.
- arXiv:1911.11929
+ arXiv:1911.11929
"""
def __init__(self,
filters,
model_to_wrap=None,
filter_scale=2,
- activation="mish",
- kernel_initializer="glorot_uniform",
- bias_initializer="zeros",
- kernel_regularizer=None,
+ activation='mish',
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
bias_regularizer=None,
+ kernel_regularizer=None,
downsample=True,
use_bn=True,
use_sync_bn=False,
norm_momentum=0.99,
norm_epsilon=0.001,
**kwargs):
- """Initializes CSPStack.
+ """CSPStack layer initializer.
Args:
filters: integer for output depth, or the number of features to learn.
model_to_wrap: callable Model or a list of callable objects that will
- process the output of CSPRoute, and be input into CSPConnect. List will
- be called sequentially.
+ process the output of CSPRoute, and be input into CSPConnect.
+ list will be called sequentially.
filter_scale: integer dicating (filters//2) or the number of filters in
the partial feature stack.
activation: string for activation function to use in layer.
@@ -756,66 +808,829 @@ def __init__(self,
weights.
bias_initializer: string to indicate which function to use to initialize
bias.
- kernel_regularizer: string to indicate which function to use to
- regularizer weights.
bias_regularizer: string to indicate which function to use to regularizer
bias.
+ kernel_regularizer: string to indicate which function to use to
+ regularizer weights.
downsample: down_sample the input.
- use_bn: boolean for whether to use batch normalization
- use_sync_bn: boolean for whether sync batch normalization.
- norm_momentum: float for moment to use for batch normalization
- norm_epsilon: float for batch normalization epsilon
- **kwargs: Keyword Arguments
+ use_bn: boolean for whether to use batch normalization.
+ use_sync_bn: boolean for whether sync batch normalization statistics
+ of all batch norm layers to the models global statistics
+ (across all input batches).
+ norm_momentum: float for moment to use for batch normalization.
+ norm_epsilon: float for batch normalization epsilon.
+ **kwargs: Keyword Arguments.
+
+ Raises:
+ TypeError: model_to_wrap is not a layer or a list of layers
"""
+
super().__init__(**kwargs)
- # Layer params.
+ # layer params
self._filters = filters
self._filter_scale = filter_scale
self._activation = activation
self._downsample = downsample
- # Convoultion params.
+ # convoultion params
self._kernel_initializer = kernel_initializer
self._bias_initializer = bias_initializer
self._kernel_regularizer = kernel_regularizer
self._bias_regularizer = bias_regularizer
self._use_bn = use_bn
self._use_sync_bn = use_sync_bn
- self._norm_moment = norm_momentum
+ self._norm_momentum = norm_momentum
self._norm_epsilon = norm_epsilon
- if model_to_wrap is not None:
- if isinstance(model_to_wrap, Callable):
- self._model_to_wrap = [model_to_wrap]
- elif isinstance(model_to_wrap, List):
- self._model_to_wrap = model_to_wrap
- else:
- raise ValueError("The input to the CSPStack must be a list of layers"
- "that we can iterate through, or \n a callable")
- else:
+ if model_to_wrap is None:
self._model_to_wrap = []
+ elif isinstance(model_to_wrap, Callable):
+ self._model_to_wrap = [model_to_wrap]
+ elif isinstance(model_to_wrap, List):
+ self._model_to_wrap = model_to_wrap
+ else:
+ raise TypeError(
+ 'the input to the CSPStack must be a list of layers that we can' +
+ 'iterate through, or \n a callable')
def build(self, input_shape):
- self._dark_conv_args = {
- "filters": self._filters,
- "filter_scale": self._filter_scale,
- "activation": self._activation,
- "kernel_initializer": self._kernel_initializer,
- "bias_initializer": self._bias_initializer,
- "bias_regularizer": self._bias_regularizer,
- "use_bn": self._use_bn,
- "use_sync_bn": self._use_sync_bn,
- "norm_momentum": self._norm_moment,
- "norm_epsilon": self._norm_epsilon,
- "kernel_regularizer": self._kernel_regularizer,
+ dark_conv_args = {
+ 'filters': self._filters,
+ 'filter_scale': self._filter_scale,
+ 'activation': self._activation,
+ 'kernel_initializer': self._kernel_initializer,
+ 'bias_initializer': self._bias_initializer,
+ 'bias_regularizer': self._bias_regularizer,
+ 'use_bn': self._use_bn,
+ 'use_sync_bn': self._use_sync_bn,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epsilon,
+ 'kernel_regularizer': self._kernel_regularizer,
}
- self._route = CSPRoute(downsample=self._downsample, **self._dark_conv_args)
- self._connect = CSPConnect(**self._dark_conv_args)
- return
+ self._route = CSPRoute(downsample=self._downsample, **dark_conv_args)
+ self._connect = CSPConnect(**dark_conv_args)
- def call(self, inputs):
+ def call(self, inputs, training=None):
x, x_route = self._route(inputs)
for layer in self._model_to_wrap:
x = layer(x)
x = self._connect([x, x_route])
return x
+
+
+@tf.keras.utils.register_keras_serializable(package='yolo')
+class PathAggregationBlock(tf.keras.layers.Layer):
+ """Path Aggregation block."""
+
+ def __init__(self,
+ filters=1,
+ drop_final=True,
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
+ bias_regularizer=None,
+ kernel_regularizer=None,
+ use_bn=True,
+ use_sync_bn=False,
+ inverted=False,
+ norm_momentum=0.99,
+ norm_epsilon=0.001,
+ activation='leaky',
+ leaky_alpha=0.1,
+ downsample=False,
+ upsample=False,
+ upsample_size=2,
+ **kwargs):
+ """Initializer for path aggregation block.
+
+ Args:
+ filters: integer for output depth, or the number of features to learn.
+ drop_final: do not create the last convolution block.
+ kernel_initializer: string to indicate which function to use to initialize
+ weights.
+ bias_initializer: string to indicate which function to use to initialize
+ bias.
+ bias_regularizer: string to indicate which function to use to regularizer
+ bias.
+ kernel_regularizer: string to indicate which function to use to
+ regularizer weights.
+ use_bn: boolean for whether to use batch normalization.
+ use_sync_bn: boolean for whether sync batch normalization statistics
+ of all batch norm layers to the models global statistics
+ (across all input batches).
+ inverted: boolean for inverting the order of the convolutions.
+ norm_momentum: float for moment to use for batch normalization.
+ norm_epsilon: float for batch normalization epsilon.
+ activation: string or None for activation function to use in layer,
+ if None activation is replaced by linear.
+ leaky_alpha: float to use as alpha if activation function is leaky.
+ downsample: `bool` for whehter to downwample and merge.
+ upsample: `bool` for whehter to upsample and merge.
+ upsample_size: `int` how much to upsample in order to match shapes.
+ **kwargs: Keyword Arguments.
+ """
+
+ # Darkconv params
+ self._filters = filters
+ self._kernel_initializer = kernel_initializer
+ self._bias_initializer = bias_initializer
+ self._bias_regularizer = bias_regularizer
+ self._kernel_regularizer = kernel_regularizer
+ self._use_bn = use_bn
+ self._use_sync_bn = use_sync_bn
+
+ # Normal params
+ self._norm_momentum = norm_momentum
+ self._norm_epsilon = norm_epsilon
+
+ # Activation params
+ self._conv_activation = activation
+ self._leaky_alpha = leaky_alpha
+ self._downsample = downsample
+ self._upsample = upsample
+ self._upsample_size = upsample_size
+ self._drop_final = drop_final
+
+ # Block params
+ self._inverted = inverted
+
+ super().__init__(**kwargs)
+
+ def _build_regular(self, input_shape, kwargs):
+ if self._downsample:
+ self._conv = ConvBN(
+ filters=self._filters,
+ kernel_size=(3, 3),
+ strides=(2, 2),
+ padding='same',
+ **kwargs)
+ else:
+ self._conv = ConvBN(
+ filters=self._filters,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ padding='same',
+ **kwargs)
+
+ if not self._drop_final:
+ self._conv_concat = ConvBN(
+ filters=self._filters,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ padding='same',
+ **kwargs)
+
+ def _build_reversed(self, input_shape, kwargs):
+ if self._downsample:
+ self._conv_prev = ConvBN(
+ filters=self._filters,
+ kernel_size=(3, 3),
+ strides=(2, 2),
+ padding='same',
+ **kwargs)
+ else:
+ self._conv_prev = ConvBN(
+ filters=self._filters,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ padding='same',
+ **kwargs)
+
+ self._conv_route = ConvBN(
+ filters=self._filters,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ padding='same',
+ **kwargs)
+
+ if not self._drop_final:
+ self._conv_sync = ConvBN(
+ filters=self._filters,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ padding='same',
+ **kwargs)
+
+ def build(self, input_shape):
+ dark_conv_args = {
+ 'kernel_initializer': self._kernel_initializer,
+ 'bias_initializer': self._bias_initializer,
+ 'bias_regularizer': self._bias_regularizer,
+ 'use_bn': self._use_bn,
+ 'use_sync_bn': self._use_sync_bn,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epsilon,
+ 'activation': self._conv_activation,
+ 'kernel_regularizer': self._kernel_regularizer,
+ 'leaky_alpha': self._leaky_alpha,
+ }
+
+ if self._inverted:
+ self._build_reversed(input_shape, dark_conv_args)
+ else:
+ self._build_regular(input_shape, dark_conv_args)
+
+ self._concat = tf.keras.layers.Concatenate()
+ super().build(input_shape)
+
+ def _call_regular(self, inputs, training=None):
+ input_to_convolve, input_to_concat = inputs
+ x_prev = self._conv(input_to_convolve)
+ if self._upsample:
+ x_prev = spatial_transform_ops.nearest_upsampling(x_prev,
+ self._upsample_size)
+ x = self._concat([x_prev, input_to_concat])
+
+ # used in csp conversion
+ if not self._drop_final:
+ x = self._conv_concat(x)
+ return x_prev, x
+
+ def _call_reversed(self, inputs, training=None):
+ x_route, x_prev = inputs
+ x_prev = self._conv_prev(x_prev)
+ if self._upsample:
+ x_prev = spatial_transform_ops.nearest_upsampling(x_prev,
+ self._upsample_size)
+ x_route = self._conv_route(x_route)
+ x = self._concat([x_route, x_prev])
+ if not self._drop_final:
+ x = self._conv_sync(x)
+ return x_prev, x
+
+ def call(self, inputs, training=None):
+ # done this way to prevent confusion in the auto graph
+ if self._inverted:
+ return self._call_reversed(inputs, training=training)
+ else:
+ return self._call_regular(inputs, training=training)
+
+
+@tf.keras.utils.register_keras_serializable(package='yolo')
+class SPP(tf.keras.layers.Layer):
+ """Spatial Pyramid Pooling.
+
+ A non-agregated SPP layer that uses Pooling.
+ """
+
+ def __init__(self, sizes, **kwargs):
+ self._sizes = list(reversed(sizes))
+ if not sizes:
+ raise ValueError('More than one maxpool should be specified in SSP block')
+ super().__init__(**kwargs)
+
+ def build(self, input_shape):
+ maxpools = []
+ for size in self._sizes:
+ maxpools.append(
+ tf.keras.layers.MaxPool2D(
+ pool_size=(size, size),
+ strides=(1, 1),
+ padding='same',
+ data_format=None))
+ self._maxpools = maxpools
+ super().build(input_shape)
+
+ def call(self, inputs, training=None):
+ outputs = []
+ for maxpool in self._maxpools:
+ outputs.append(maxpool(inputs))
+ outputs.append(inputs)
+ concat_output = tf.keras.layers.concatenate(outputs)
+ return concat_output
+
+ def get_config(self):
+ layer_config = {'sizes': self._sizes}
+ layer_config.update(super().get_config())
+ return layer_config
+
+
+class SAM(tf.keras.layers.Layer):
+ """Spatial Attention Model.
+
+ [1] Sanghyun Woo, Jongchan Park, Joon-Young Lee, In So Kweon
+ CBAM: Convolutional Block Attention Module. arXiv:1807.06521
+
+ implementation of the Spatial Attention Model (SAM)
+ """
+
+ def __init__(self,
+ use_pooling=False,
+ filter_match=False,
+ filters=1,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ padding='same',
+ dilation_rate=(1, 1),
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
+ bias_regularizer=None,
+ kernel_regularizer=None,
+ use_bn=True,
+ use_sync_bn=True,
+ norm_momentum=0.99,
+ norm_epsilon=0.001,
+ activation='sigmoid',
+ output_activation=None,
+ leaky_alpha=0.1,
+ **kwargs):
+
+ # use_pooling
+ self._use_pooling = use_pooling
+ self._filters = filters
+ self._output_activation = output_activation
+ self._leaky_alpha = leaky_alpha
+
+ self.dark_conv_args = {
+ 'kernel_size': kernel_size,
+ 'strides': strides,
+ 'padding': padding,
+ 'dilation_rate': dilation_rate,
+ 'kernel_initializer': kernel_initializer,
+ 'bias_initializer': bias_initializer,
+ 'bias_regularizer': bias_regularizer,
+ 'use_bn': use_bn,
+ 'use_sync_bn': use_sync_bn,
+ 'norm_momentum': norm_momentum,
+ 'norm_epsilon': norm_epsilon,
+ 'activation': activation,
+ 'kernel_regularizer': kernel_regularizer,
+ 'leaky_alpha': leaky_alpha
+ }
+
+ super().__init__(**kwargs)
+
+ def build(self, input_shape):
+ if self._filters == -1:
+ self._filters = input_shape[-1]
+ self._conv = ConvBN(filters=self._filters, **self.dark_conv_args)
+ if self._output_activation == 'leaky':
+ self._activation_fn = tf.keras.layers.LeakyReLU(alpha=self._leaky_alpha)
+ elif self._output_activation == 'mish':
+ self._activation_fn = lambda x: x * tf.math.tanh(tf.math.softplus(x))
+ else:
+ self._activation_fn = tf_utils.get_activation(self._output_activation)
+
+ def call(self, inputs, training=None):
+ if self._use_pooling:
+ depth_max = tf.reduce_max(inputs, axis=-1, keepdims=True)
+ depth_avg = tf.reduce_mean(inputs, axis=-1, keepdims=True)
+ input_maps = tf.concat([depth_avg, depth_max], axis=-1)
+ else:
+ input_maps = inputs
+
+ attention_mask = self._conv(input_maps)
+ return self._activation_fn(inputs * attention_mask)
+
+
+class CAM(tf.keras.layers.Layer):
+ """Channel Attention Model.
+
+ [1] Sanghyun Woo, Jongchan Park, Joon-Young Lee, In So Kweon
+ CBAM: Convolutional Block Attention Module. arXiv:1807.06521
+
+ Implementation of the Channel Attention Model (CAM)
+ """
+
+ def __init__(self,
+ reduction_ratio=1.0,
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
+ bias_regularizer=None,
+ kernel_regularizer=None,
+ use_bn=False,
+ use_sync_bn=False,
+ use_bias=False,
+ norm_momentum=0.99,
+ norm_epsilon=0.001,
+ mlp_activation='linear',
+ activation='sigmoid',
+ leaky_alpha=0.1,
+ **kwargs):
+
+ self._reduction_ratio = reduction_ratio
+
+ # use_pooling
+ if use_sync_bn:
+ self._bn = tf.keras.layers.experimental.SyncBatchNormalization
+ else:
+ self._bn = tf.keras.layers.BatchNormalization
+
+ if not use_bn:
+ self._bn = Identity
+ self._bn_args = {}
+ else:
+ self._bn_args = {
+ 'momentum': norm_momentum,
+ 'epsilon': norm_epsilon,
+ }
+
+ self._mlp_args = {
+ 'use_bias': use_bias,
+ 'kernel_initializer': kernel_initializer,
+ 'bias_initializer': bias_initializer,
+ 'bias_regularizer': bias_regularizer,
+ 'activation': mlp_activation,
+ 'kernel_regularizer': kernel_regularizer,
+ }
+
+ self._leaky_alpha = leaky_alpha
+ self._activation = activation
+
+ super().__init__(**kwargs)
+
+ def build(self, input_shape):
+ self._filters = input_shape[-1]
+
+ self._mlp = tf.keras.Sequential([
+ tf.keras.layers.Dense(self._filters, **self._mlp_args),
+ self._bn(**self._bn_args),
+ tf.keras.layers.Dense(
+ int(self._filters * self._reduction_ratio), **self._mlp_args),
+ self._bn(**self._bn_args),
+ tf.keras.layers.Dense(self._filters, **self._mlp_args),
+ self._bn(**self._bn_args),
+ ])
+
+ if self._activation == 'leaky':
+ self._activation_fn = tf.keras.layers.LeakyReLU(alpha=self._leaky_alpha)
+ elif self._activation == 'mish':
+ self._activation_fn = lambda x: x * tf.math.tanh(tf.math.softplus(x))
+ else:
+ self._activation_fn = tf_utils.get_activation(self._activation)
+
+ def call(self, inputs, training=None):
+ depth_max = self._mlp(tf.reduce_max(inputs, axis=(1, 2)))
+ depth_avg = self._mlp(tf.reduce_mean(inputs, axis=(1, 2)))
+ channel_mask = self._activation_fn(depth_avg + depth_max)
+
+ channel_mask = tf.expand_dims(channel_mask, axis=1)
+ attention_mask = tf.expand_dims(channel_mask, axis=1)
+
+ return inputs * attention_mask
+
+
+class CBAM(tf.keras.layers.Layer):
+ """Convolutional Block Attention Module.
+
+ [1] Sanghyun Woo, Jongchan Park, Joon-Young Lee, In So Kweon
+ CBAM: Convolutional Block Attention Module. arXiv:1807.06521
+
+ implementation of the Convolution Block Attention Module (CBAM)
+ """
+
+ def __init__(self,
+ use_pooling=False,
+ filters=1,
+ reduction_ratio=1.0,
+ kernel_size=(1, 1),
+ strides=(1, 1),
+ padding='same',
+ dilation_rate=(1, 1),
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
+ bias_regularizer=None,
+ kernel_regularizer=None,
+ use_bn=True,
+ use_sync_bn=False,
+ norm_momentum=0.99,
+ norm_epsilon=0.001,
+ mlp_activation=None,
+ activation='sigmoid',
+ leaky_alpha=0.1,
+ **kwargs):
+
+ # use_pooling
+
+ self._sam_args = {
+ 'use_pooling': use_pooling,
+ 'filters': filters,
+ 'kernel_size': kernel_size,
+ 'strides': strides,
+ 'padding': padding,
+ 'dilation_rate': dilation_rate,
+ }
+
+ self._cam_args = {
+ 'reduction_ratio': reduction_ratio,
+ 'mlp_activation': mlp_activation
+ }
+
+ self._common_args = {
+ 'kernel_initializer': kernel_initializer,
+ 'bias_initializer': bias_initializer,
+ 'bias_regularizer': bias_regularizer,
+ 'use_bn': use_bn,
+ 'use_sync_bn': use_sync_bn,
+ 'norm_momentum': norm_momentum,
+ 'norm_epsilon': norm_epsilon,
+ 'activation': activation,
+ 'kernel_regularizer': kernel_regularizer,
+ 'leaky_alpha': leaky_alpha
+ }
+
+ self._cam_args.update(self._common_args)
+ self._sam_args.update(self._common_args)
+ super().__init__(**kwargs)
+
+ def build(self, input_shape):
+ self._cam = CAM(**self._cam_args)
+ self._sam = SAM(**self._sam_args)
+
+ def call(self, inputs, training=None):
+ return self._sam(self._cam(inputs))
+
+
+@tf.keras.utils.register_keras_serializable(package='yolo')
+class DarkRouteProcess(tf.keras.layers.Layer):
+ """Dark Route Process block.
+
+ Process darknet outputs and connect back bone to head more generalizably
+ Abstracts repetition of DarkConv objects that is common in YOLO.
+
+ It is used like the following:
+
+ x = ConvBN(1024, (3, 3), (1, 1))(x)
+ proc = DarkRouteProcess(filters = 1024,
+ repetitions = 3,
+ insert_spp = False)(x)
+ """
+
+ def __init__(
+ self,
+ filters=2,
+ repetitions=2,
+ insert_spp=False,
+ insert_sam=False,
+ insert_cbam=False,
+ csp_stack=0,
+ csp_scale=2,
+ kernel_initializer='glorot_uniform',
+ bias_initializer='zeros',
+ bias_regularizer=None,
+ kernel_regularizer=None,
+ use_sync_bn=False,
+ norm_momentum=0.99,
+ norm_epsilon=0.001,
+ block_invert=False,
+ activation='leaky',
+ leaky_alpha=0.1,
+ spp_keys=None,
+ **kwargs):
+ """DarkRouteProcess initializer.
+
+ Args:
+ filters: the number of filters to be used in all subsequent layers
+ filters should be the depth of the tensor input into this layer,
+ as no downsampling can be done within this layer object.
+ repetitions: number of times to repeat the processign nodes.
+ for tiny: 1 repition, no spp allowed.
+ for spp: insert_spp = True, and allow for 6 repetitions.
+ for regular: insert_spp = False, and allow for 6 repetitions.
+ insert_spp: bool if true add the spatial pyramid pooling layer.
+ insert_sam: bool if true add spatial attention module to path.
+ insert_cbam: bool if true add convolutional block attention
+ module to path.
+ csp_stack: int for the number of sequential layers from 0
+ to you would like to convert into a Cross Stage
+ Partial(csp) type.
+ csp_scale: int for how much to down scale the number of filters
+ only for the csp layers in the csp section of the processing
+ path. A value 2 indicates that each layer that is int eh CSP
+ stack will have filters = filters/2.
+ kernel_initializer: method to use to initialize kernel weights.
+ bias_initializer: method to use to initialize the bias of the conv
+ layers.
+ bias_regularizer: string to indicate which function to use to regularizer
+ bias.
+ kernel_regularizer: string to indicate which function to use to
+ regularizer weights.
+ use_sync_bn: bool if true use the sync batch normalization.
+ norm_momentum: batch norm parameter see Tensorflow documentation.
+ norm_epsilon: batch norm parameter see Tensorflow documentation.
+ block_invert: bool use for switching between the even and odd
+ repretions of layers. usually the repetition is based on a
+ 3x3 conv with filters, followed by a 1x1 with filters/2 with
+ an even number of repetitions to ensure each 3x3 gets a 1x1
+ sqeeze. block invert swaps the 3x3/1 1x1/2 to a 1x1/2 3x3/1
+ ordering typically used when the model requires an odd number
+ of repetiitions. All other peramters maintain their affects
+ activation: activation function to use in processing.
+ leaky_alpha: if leaky acitivation function, the alpha to use in
+ processing the relu input.
+ spp_keys: List[int] of the sampling levels to be applied by
+ the Spatial Pyramid Pooling Layer. By default it is
+ [5, 9, 13] inidicating a 5x5 pooling followed by 9x9
+ followed by 13x13 then followed by the standard concatnation
+ and convolution.
+ **kwargs: Keyword Arguments.
+ """
+
+ super().__init__(**kwargs)
+ # darkconv params
+ self._filters = filters
+ self._use_sync_bn = use_sync_bn
+ self._kernel_initializer = kernel_initializer
+ self._bias_initializer = bias_initializer
+ self._bias_regularizer = bias_regularizer
+ self._kernel_regularizer = kernel_regularizer
+
+ # normal params
+ self._norm_momentum = norm_momentum
+ self._norm_epsilon = norm_epsilon
+
+ # activation params
+ self._activation = activation
+ self._leaky_alpha = leaky_alpha
+
+ repetitions += (2 * int(insert_spp))
+ if repetitions == 1:
+ block_invert = True
+
+ self._repetitions = repetitions
+ self.layer_list, self.outputs = self._get_base_layers()
+
+ if csp_stack > 0:
+ self._csp_scale = csp_scale
+ csp_stack += (2 * int(insert_spp))
+ self._csp_filters = lambda x: x // csp_scale
+ self._convert_csp(self.layer_list, self.outputs, csp_stack)
+ block_invert = False
+
+ self._csp_stack = csp_stack
+
+ if block_invert:
+ self._conv1_filters = lambda x: x
+ self._conv2_filters = lambda x: x // 2
+ self._conv1_kernel = (3, 3)
+ self._conv2_kernel = (1, 1)
+ else:
+ self._conv1_filters = lambda x: x // 2
+ self._conv2_filters = lambda x: x
+ self._conv1_kernel = (1, 1)
+ self._conv2_kernel = (3, 3)
+
+ # insert SPP will always add to the total nuber of layer, never replace
+ if insert_spp:
+ self._spp_keys = spp_keys if spp_keys is not None else [5, 9, 13]
+ self.layer_list = self._insert_spp(self.layer_list)
+
+ if repetitions > 1:
+ self.outputs[-2] = True
+
+ if insert_sam:
+ self.layer_list = self._insert_sam(self.layer_list, self.outputs)
+ self._repetitions += 1
+ self.outputs[-1] = True
+
+ def _get_base_layers(self):
+ layer_list = []
+ outputs = []
+ for i in range(self._repetitions):
+ layers = ['conv1'] * ((i + 1) % 2) + ['conv2'] * (i % 2)
+ layer_list.extend(layers)
+ outputs = [False] + outputs
+ return layer_list, outputs
+
+ def _insert_spp(self, layer_list):
+ if len(layer_list) <= 3:
+ layer_list[1] = 'spp'
+ else:
+ layer_list[3] = 'spp'
+ return layer_list
+
+ def _convert_csp(self, layer_list, outputs, csp_stack_size):
+ layer_list[0] = 'csp_route'
+ layer_list.insert(csp_stack_size - 1, 'csp_connect')
+ outputs.insert(csp_stack_size - 1, False)
+ return layer_list, outputs
+
+ def _insert_sam(self, layer_list, outputs):
+ if len(layer_list) >= 2 and layer_list[-2] != 'spp':
+ layer_list.insert(-2, 'sam')
+ outputs.insert(-1, True)
+ else:
+ layer_list.insert(-1, 'sam')
+ outputs.insert(-1, False)
+ return layer_list
+
+ def _conv1(self, filters, kwargs, csp=False):
+ if csp:
+ filters_ = self._csp_filters
+ else:
+ filters_ = self._conv1_filters
+
+ x1 = ConvBN(
+ filters=filters_(filters),
+ kernel_size=self._conv1_kernel,
+ strides=(1, 1),
+ padding='same',
+ use_bn=True,
+ **kwargs)
+ return x1
+
+ def _conv2(self, filters, kwargs, csp=False):
+ if csp:
+ filters_ = self._csp_filters
+ else:
+ filters_ = self._conv2_filters
+
+ x1 = ConvBN(
+ filters=filters_(filters),
+ kernel_size=self._conv2_kernel,
+ strides=(1, 1),
+ padding='same',
+ use_bn=True,
+ **kwargs)
+ return x1
+
+ def _csp_route(self, filters, kwargs):
+ x1 = CSPRoute(
+ filters=filters,
+ filter_scale=self._csp_scale,
+ downsample=False,
+ **kwargs)
+ return x1
+
+ def _csp_connect(self, filters, kwargs):
+ x1 = CSPConnect(filters=filters, drop_final=True, drop_first=True, **kwargs)
+ return x1
+
+ def _spp(self, filters, kwargs):
+ x1 = SPP(self._spp_keys)
+ return x1
+
+ def _sam(self, filters, kwargs):
+ x1 = SAM(filters=-1, use_pooling=False, use_bn=True, **kwargs)
+ return x1
+
+ def build(self, input_shape):
+ dark_conv_args = {
+ 'activation': self._activation,
+ 'kernel_initializer': self._kernel_initializer,
+ 'bias_initializer': self._bias_initializer,
+ 'bias_regularizer': self._bias_regularizer,
+ 'use_sync_bn': self._use_sync_bn,
+ 'norm_momentum': self._norm_momentum,
+ 'norm_epsilon': self._norm_epsilon,
+ 'kernel_regularizer': self._kernel_regularizer,
+ 'leaky_alpha': self._leaky_alpha,
+ }
+
+ csp = False
+ self.layers = []
+ for layer in self.layer_list:
+ if layer == 'csp_route':
+ self.layers.append(self._csp_route(self._filters, dark_conv_args))
+ csp = True
+ elif layer == 'csp_connect':
+ self.layers.append(self._csp_connect(self._filters, dark_conv_args))
+ csp = False
+ elif layer == 'conv1':
+ self.layers.append(self._conv1(self._filters, dark_conv_args, csp=csp))
+ elif layer == 'conv2':
+ self.layers.append(self._conv2(self._filters, dark_conv_args, csp=csp))
+ elif layer == 'spp':
+ self.layers.append(self._spp(self._filters, dark_conv_args))
+ elif layer == 'sam':
+ self.layers.append(self._sam(-1, dark_conv_args))
+
+ self._lim = len(self.layers)
+ super().build(input_shape)
+
+ def _call_regular(self, inputs, training=None):
+ # check efficiency
+ x = inputs
+ x_prev = x
+ output_prev = True
+
+ for (layer, output) in zip(self.layers, self.outputs):
+ if output_prev:
+ x_prev = x
+ x = layer(x)
+ output_prev = output
+ return x_prev, x
+
+ def _call_csp(self, inputs, training=None):
+ # check efficiency
+ x = inputs
+ x_prev = x
+ output_prev = True
+ x_route = None
+
+ for i, (layer, output) in enumerate(zip(self.layers, self.outputs)):
+ if output_prev:
+ x_prev = x
+ if i == 0:
+ x, x_route = layer(x)
+ elif i == self._csp_stack - 1:
+ x = layer([x, x_route])
+ else:
+ x = layer(x)
+ output_prev = output
+ return x_prev, x
+
+ def call(self, inputs, training=None):
+ if self._csp_stack > 0:
+ return self._call_csp(inputs, training=training)
+ else:
+ return self._call_regular(inputs)
diff --git a/official/vision/beta/projects/yolo/modeling/layers/nn_blocks_test.py b/official/vision/beta/projects/yolo/modeling/layers/nn_blocks_test.py
index 5df28a4f3fb..455f5ce199f 100644
--- a/official/vision/beta/projects/yolo/modeling/layers/nn_blocks_test.py
+++ b/official/vision/beta/projects/yolo/modeling/layers/nn_blocks_test.py
@@ -13,7 +13,6 @@
# limitations under the License.
# Lint as: python3
-
from absl.testing import parameterized
import numpy as np
import tensorflow as tf
@@ -23,8 +22,8 @@
class CSPConnectTest(tf.test.TestCase, parameterized.TestCase):
- @parameterized.named_parameters(("same", 224, 224, 64, 1),
- ("downsample", 224, 224, 64, 2))
+ @parameterized.named_parameters(('same', 224, 224, 64, 1),
+ ('downsample', 224, 224, 64, 2))
def test_pass_through(self, width, height, filters, mod):
x = tf.keras.Input(shape=(width, height, filters))
test_layer = nn_blocks.CSPRoute(filters=filters, filter_scale=mod)
@@ -38,8 +37,8 @@ def test_pass_through(self, width, height, filters, mod):
[None, np.ceil(width // 2),
np.ceil(height // 2), (filters)])
- @parameterized.named_parameters(("same", 224, 224, 64, 1),
- ("downsample", 224, 224, 128, 2))
+ @parameterized.named_parameters(('same', 224, 224, 64, 1),
+ ('downsample', 224, 224, 128, 2))
def test_gradient_pass_though(self, filters, width, height, mod):
loss = tf.keras.losses.MeanSquaredError()
optimizer = tf.keras.optimizers.SGD()
@@ -49,10 +48,11 @@ def test_gradient_pass_though(self, filters, width, height, mod):
init = tf.random_normal_initializer()
x = tf.Variable(
initial_value=init(shape=(1, width, height, filters), dtype=tf.float32))
- y = tf.Variable(initial_value=init(shape=(1, int(np.ceil(width // 2)),
- int(np.ceil(height // 2)),
- filters),
- dtype=tf.float32))
+ y = tf.Variable(
+ initial_value=init(
+ shape=(1, int(np.ceil(width // 2)), int(np.ceil(height // 2)),
+ filters),
+ dtype=tf.float32))
with tf.GradientTape() as tape:
x_hat, x_prev = test_layer(x)
@@ -66,8 +66,8 @@ def test_gradient_pass_though(self, filters, width, height, mod):
class CSPRouteTest(tf.test.TestCase, parameterized.TestCase):
- @parameterized.named_parameters(("same", 224, 224, 64, 1),
- ("downsample", 224, 224, 64, 2))
+ @parameterized.named_parameters(('same', 224, 224, 64, 1),
+ ('downsample', 224, 224, 64, 2))
def test_pass_through(self, width, height, filters, mod):
x = tf.keras.Input(shape=(width, height, filters))
test_layer = nn_blocks.CSPRoute(filters=filters, filter_scale=mod)
@@ -79,8 +79,8 @@ def test_pass_through(self, width, height, filters, mod):
[None, np.ceil(width // 2),
np.ceil(height // 2), (filters / mod)])
- @parameterized.named_parameters(("same", 224, 224, 64, 1),
- ("downsample", 224, 224, 128, 2))
+ @parameterized.named_parameters(('same', 224, 224, 64, 1),
+ ('downsample', 224, 224, 128, 2))
def test_gradient_pass_though(self, filters, width, height, mod):
loss = tf.keras.losses.MeanSquaredError()
optimizer = tf.keras.optimizers.SGD()
@@ -90,10 +90,11 @@ def test_gradient_pass_though(self, filters, width, height, mod):
init = tf.random_normal_initializer()
x = tf.Variable(
initial_value=init(shape=(1, width, height, filters), dtype=tf.float32))
- y = tf.Variable(initial_value=init(shape=(1, int(np.ceil(width // 2)),
- int(np.ceil(height // 2)),
- filters),
- dtype=tf.float32))
+ y = tf.Variable(
+ initial_value=init(
+ shape=(1, int(np.ceil(width // 2)), int(np.ceil(height // 2)),
+ filters),
+ dtype=tf.float32))
with tf.GradientTape() as tape:
x_hat, x_prev = test_layer(x)
@@ -107,11 +108,11 @@ def test_gradient_pass_though(self, filters, width, height, mod):
class CSPStackTest(tf.test.TestCase, parameterized.TestCase):
- def build_layer(
- self, layer_type, filters, filter_scale, count, stack_type, downsample):
+ def build_layer(self, layer_type, filters, filter_scale, count, stack_type,
+ downsample):
if stack_type is not None:
layers = []
- if layer_type == "residual":
+ if layer_type == 'residual':
for _ in range(count):
layers.append(
nn_blocks.DarkResidual(
@@ -120,7 +121,7 @@ def build_layer(
for _ in range(count):
layers.append(nn_blocks.ConvBN(filters=filters))
- if stack_type == "model":
+ if stack_type == 'model':
layers = tf.keras.Sequential(layers=layers)
else:
layers = None
@@ -133,10 +134,10 @@ def build_layer(
return stack
@parameterized.named_parameters(
- ("no_stack", 224, 224, 64, 2, "residual", None, 0, True),
- ("residual_stack", 224, 224, 64, 2, "residual", "list", 2, True),
- ("conv_stack", 224, 224, 64, 2, "conv", "list", 3, False),
- ("callable_no_scale", 224, 224, 64, 1, "residual", "model", 5, False))
+ ('no_stack', 224, 224, 64, 2, 'residual', None, 0, True),
+ ('residual_stack', 224, 224, 64, 2, 'residual', 'list', 2, True),
+ ('conv_stack', 224, 224, 64, 2, 'conv', 'list', 3, False),
+ ('callable_no_scale', 224, 224, 64, 1, 'residual', 'model', 5, False))
def test_pass_through(self, width, height, filters, mod, layer_type,
stack_type, count, downsample):
x = tf.keras.Input(shape=(width, height, filters))
@@ -152,10 +153,10 @@ def test_pass_through(self, width, height, filters, mod, layer_type,
self.assertAllEqual(outx.shape.as_list(), [None, width, height, filters])
@parameterized.named_parameters(
- ("no_stack", 224, 224, 64, 2, "residual", None, 0, True),
- ("residual_stack", 224, 224, 64, 2, "residual", "list", 2, True),
- ("conv_stack", 224, 224, 64, 2, "conv", "list", 3, False),
- ("callable_no_scale", 224, 224, 64, 1, "residual", "model", 5, False))
+ ('no_stack', 224, 224, 64, 2, 'residual', None, 0, True),
+ ('residual_stack', 224, 224, 64, 2, 'residual', 'list', 2, True),
+ ('conv_stack', 224, 224, 64, 2, 'conv', 'list', 3, False),
+ ('callable_no_scale', 224, 224, 64, 1, 'residual', 'model', 5, False))
def test_gradient_pass_though(self, width, height, filters, mod, layer_type,
stack_type, count, downsample):
loss = tf.keras.losses.MeanSquaredError()
@@ -188,10 +189,10 @@ def test_gradient_pass_though(self, width, height, filters, mod, layer_type,
class ConvBNTest(tf.test.TestCase, parameterized.TestCase):
@parameterized.named_parameters(
- ("valid", (3, 3), "valid", (1, 1)), ("same", (3, 3), "same", (1, 1)),
- ("downsample", (3, 3), "same", (2, 2)), ("test", (1, 1), "valid", (1, 1)))
+ ('valid', (3, 3), 'valid', (1, 1)), ('same', (3, 3), 'same', (1, 1)),
+ ('downsample', (3, 3), 'same', (2, 2)), ('test', (1, 1), 'valid', (1, 1)))
def test_pass_through(self, kernel_size, padding, strides):
- if padding == "same":
+ if padding == 'same':
pad_const = 1
else:
pad_const = 0
@@ -212,16 +213,16 @@ def test_pass_through(self, kernel_size, padding, strides):
print(test)
self.assertAllEqual(outx.shape.as_list(), test)
- @parameterized.named_parameters(("filters", 3))
+ @parameterized.named_parameters(('filters', 3))
def test_gradient_pass_though(self, filters):
loss = tf.keras.losses.MeanSquaredError()
optimizer = tf.keras.optimizers.SGD()
- with tf.device("/CPU:0"):
- test_layer = nn_blocks.ConvBN(filters, kernel_size=(3, 3), padding="same")
+ with tf.device('/CPU:0'):
+ test_layer = nn_blocks.ConvBN(filters, kernel_size=(3, 3), padding='same')
init = tf.random_normal_initializer()
- x = tf.Variable(initial_value=init(shape=(1, 224, 224,
- 3), dtype=tf.float32))
+ x = tf.Variable(
+ initial_value=init(shape=(1, 224, 224, 3), dtype=tf.float32))
y = tf.Variable(
initial_value=init(shape=(1, 224, 224, filters), dtype=tf.float32))
@@ -235,9 +236,9 @@ def test_gradient_pass_though(self, filters):
class DarkResidualTest(tf.test.TestCase, parameterized.TestCase):
- @parameterized.named_parameters(("same", 224, 224, 64, False),
- ("downsample", 223, 223, 32, True),
- ("oddball", 223, 223, 32, False))
+ @parameterized.named_parameters(('same', 224, 224, 64, False),
+ ('downsample', 223, 223, 32, True),
+ ('oddball', 223, 223, 32, False))
def test_pass_through(self, width, height, filters, downsample):
mod = 1
if downsample:
@@ -252,9 +253,9 @@ def test_pass_through(self, width, height, filters, downsample):
[None, np.ceil(width / mod),
np.ceil(height / mod), filters])
- @parameterized.named_parameters(("same", 64, 224, 224, False),
- ("downsample", 32, 223, 223, True),
- ("oddball", 32, 223, 223, False))
+ @parameterized.named_parameters(('same', 64, 224, 224, False),
+ ('downsample', 32, 223, 223, True),
+ ('oddball', 32, 223, 223, False))
def test_gradient_pass_though(self, filters, width, height, downsample):
loss = tf.keras.losses.MeanSquaredError()
optimizer = tf.keras.optimizers.SGD()
@@ -268,10 +269,11 @@ def test_gradient_pass_though(self, filters, width, height, downsample):
init = tf.random_normal_initializer()
x = tf.Variable(
initial_value=init(shape=(1, width, height, filters), dtype=tf.float32))
- y = tf.Variable(initial_value=init(shape=(1, int(np.ceil(width / mod)),
- int(np.ceil(height / mod)),
- filters),
- dtype=tf.float32))
+ y = tf.Variable(
+ initial_value=init(
+ shape=(1, int(np.ceil(width / mod)), int(np.ceil(height / mod)),
+ filters),
+ dtype=tf.float32))
with tf.GradientTape() as tape:
x_hat = test_layer(x)
@@ -281,5 +283,104 @@ def test_gradient_pass_though(self, filters, width, height, downsample):
self.assertNotIn(None, grad)
-if __name__ == "__main__":
+
+class DarkSppTest(tf.test.TestCase, parameterized.TestCase):
+
+ @parameterized.named_parameters(('RouteProcessSpp', 224, 224, 3, [5, 9, 13]),
+ ('test1', 300, 300, 10, [2, 3, 4, 5]),
+ ('test2', 256, 256, 5, [10]))
+ def test_pass_through(self, width, height, channels, sizes):
+ x = tf.keras.Input(shape=(width, height, channels))
+ test_layer = nn_blocks.SPP(sizes=sizes)
+ outx = test_layer(x)
+ self.assertAllEqual(outx.shape.as_list(),
+ [None, width, height, channels * (len(sizes) + 1)])
+ return
+
+ @parameterized.named_parameters(('RouteProcessSpp', 224, 224, 3, [5, 9, 13]),
+ ('test1', 300, 300, 10, [2, 3, 4, 5]),
+ ('test2', 256, 256, 5, [10]))
+ def test_gradient_pass_though(self, width, height, channels, sizes):
+ loss = tf.keras.losses.MeanSquaredError()
+ optimizer = tf.keras.optimizers.SGD()
+ test_layer = nn_blocks.SPP(sizes=sizes)
+
+ init = tf.random_normal_initializer()
+ x = tf.Variable(
+ initial_value=init(
+ shape=(1, width, height, channels), dtype=tf.float32))
+ y = tf.Variable(
+ initial_value=init(
+ shape=(1, width, height, channels * (len(sizes) + 1)),
+ dtype=tf.float32))
+
+ with tf.GradientTape() as tape:
+ x_hat = test_layer(x)
+ grad_loss = loss(x_hat, y)
+ grad = tape.gradient(grad_loss, test_layer.trainable_variables)
+ optimizer.apply_gradients(zip(grad, test_layer.trainable_variables))
+
+ self.assertNotIn(None, grad)
+ return
+
+
+class DarkRouteProcessTest(tf.test.TestCase, parameterized.TestCase):
+
+ @parameterized.named_parameters(
+ ('test1', 224, 224, 64, 7, False), ('test2', 223, 223, 32, 3, False),
+ ('tiny', 223, 223, 16, 1, False), ('spp', 224, 224, 64, 7, False))
+ def test_pass_through(self, width, height, filters, repetitions, spp):
+ x = tf.keras.Input(shape=(width, height, filters))
+ test_layer = nn_blocks.DarkRouteProcess(
+ filters=filters, repetitions=repetitions, insert_spp=spp)
+ outx = test_layer(x)
+ self.assertLen(outx, 2, msg='len(outx) != 2')
+ if repetitions == 1:
+ filter_y1 = filters
+ else:
+ filter_y1 = filters // 2
+ self.assertAllEqual(
+ outx[1].shape.as_list(), [None, width, height, filter_y1])
+ self.assertAllEqual(
+ filters % 2,
+ 0,
+ msg='Output of a DarkRouteProcess layer has an odd number of filters')
+ self.assertAllEqual(outx[0].shape.as_list(), [None, width, height, filters])
+
+ @parameterized.named_parameters(
+ ('test1', 224, 224, 64, 7, False), ('test2', 223, 223, 32, 3, False),
+ ('tiny', 223, 223, 16, 1, False), ('spp', 224, 224, 64, 7, False))
+ def test_gradient_pass_though(self, width, height, filters, repetitions, spp):
+ loss = tf.keras.losses.MeanSquaredError()
+ optimizer = tf.keras.optimizers.SGD()
+ test_layer = nn_blocks.DarkRouteProcess(
+ filters=filters, repetitions=repetitions, insert_spp=spp)
+
+ if repetitions == 1:
+ filter_y1 = filters
+ else:
+ filter_y1 = filters // 2
+
+ init = tf.random_normal_initializer()
+ x = tf.Variable(
+ initial_value=init(shape=(1, width, height, filters), dtype=tf.float32))
+ y_0 = tf.Variable(
+ initial_value=init(shape=(1, width, height, filters), dtype=tf.float32))
+ y_1 = tf.Variable(
+ initial_value=init(
+ shape=(1, width, height, filter_y1), dtype=tf.float32))
+
+ with tf.GradientTape() as tape:
+ x_hat_0, x_hat_1 = test_layer(x)
+ grad_loss_0 = loss(x_hat_0, y_0)
+ grad_loss_1 = loss(x_hat_1, y_1)
+ grad = tape.gradient([grad_loss_0, grad_loss_1],
+ test_layer.trainable_variables)
+ optimizer.apply_gradients(zip(grad, test_layer.trainable_variables))
+
+ self.assertNotIn(None, grad)
+ return
+
+
+if __name__ == '__main__':
tf.test.main()
diff --git a/official/vision/beta/serving/detection.py b/official/vision/beta/serving/detection.py
index 7061048e4b6..e8bb5edf98f 100644
--- a/official/vision/beta/serving/detection.py
+++ b/official/vision/beta/serving/detection.py
@@ -34,9 +34,9 @@ class DetectionModule(export_base.ExportModule):
def _build_model(self):
if self._batch_size is None:
- ValueError("batch_size can't be None for detection models")
+ raise ValueError('batch_size cannot be None for detection models.')
if not self.params.task.model.detection_generator.use_batched_nms:
- ValueError('Only batched_nms is supported.')
+ raise ValueError('Only batched_nms is supported.')
input_specs = tf.keras.layers.InputSpec(shape=[self._batch_size] +
self._input_image_size + [3])
diff --git a/official/vision/beta/serving/detection_test.py b/official/vision/beta/serving/detection_test.py
index 26ec504cfa7..a4d761eb17d 100644
--- a/official/vision/beta/serving/detection_test.py
+++ b/official/vision/beta/serving/detection_test.py
@@ -118,6 +118,20 @@ def test_export(self, input_type, experiment_name, image_size):
self.assertAllClose(outputs['num_detections'].numpy(),
expected_outputs['num_detections'].numpy())
+ def test_build_model_fail_with_none_batch_size(self):
+ params = exp_factory.get_exp_config('retinanet_resnetfpn_coco')
+ with self.assertRaisesRegex(
+ ValueError, 'batch_size cannot be None for detection models.'):
+ detection.DetectionModule(
+ params, batch_size=None, input_image_size=[640, 640])
+
+ def test_build_model_fail_with_batched_nms_false(self):
+ params = exp_factory.get_exp_config('retinanet_resnetfpn_coco')
+ params.task.model.detection_generator.use_batched_nms = False
+ with self.assertRaisesRegex(ValueError, 'Only batched_nms is supported.'):
+ detection.DetectionModule(
+ params, batch_size=1, input_image_size=[640, 640])
+
if __name__ == '__main__':
tf.test.main()
diff --git a/official/vision/beta/tasks/image_classification.py b/official/vision/beta/tasks/image_classification.py
index 9f8f2edc884..5a2a0eb7b2d 100644
--- a/official/vision/beta/tasks/image_classification.py
+++ b/official/vision/beta/tasks/image_classification.py
@@ -104,6 +104,7 @@ def build_inputs(
num_classes=num_classes,
image_field_key=image_field_key,
label_field_key=label_field_key,
+ decode_jpeg_only=params.decode_jpeg_only,
aug_rand_hflip=params.aug_rand_hflip,
aug_type=params.aug_type,
is_multilabel=is_multilabel,
diff --git a/official/vision/beta/tasks/retinanet.py b/official/vision/beta/tasks/retinanet.py
index a1dca4205c5..a2e05a8be64 100644
--- a/official/vision/beta/tasks/retinanet.py
+++ b/official/vision/beta/tasks/retinanet.py
@@ -133,12 +133,54 @@ def build_inputs(self,
return dataset
+ def build_attribute_loss(self,
+ attribute_heads: List[exp_cfg.AttributeHead],
+ outputs: Mapping[str, Any],
+ labels: Mapping[str, Any],
+ box_sample_weight: tf.Tensor) -> float:
+ """Computes attribute loss.
+
+ Args:
+ attribute_heads: a list of attribute head configs.
+ outputs: RetinaNet model outputs.
+ labels: RetinaNet labels.
+ box_sample_weight: normalized bounding box sample weights.
+
+ Returns:
+ Attribute loss of all attribute heads.
+ """
+ attribute_loss = 0.0
+ for head in attribute_heads:
+ if head.name not in labels['attribute_targets']:
+ raise ValueError(f'Attribute {head.name} not found in label targets.')
+ if head.name not in outputs['attribute_outputs']:
+ raise ValueError(f'Attribute {head.name} not found in model outputs.')
+
+ y_true_att = keras_cv.losses.multi_level_flatten(
+ labels['attribute_targets'][head.name], last_dim=head.size)
+ y_pred_att = keras_cv.losses.multi_level_flatten(
+ outputs['attribute_outputs'][head.name], last_dim=head.size)
+ if head.type == 'regression':
+ att_loss_fn = tf.keras.losses.Huber(
+ 1.0, reduction=tf.keras.losses.Reduction.SUM)
+ att_loss = att_loss_fn(
+ y_true=y_true_att,
+ y_pred=y_pred_att,
+ sample_weight=box_sample_weight)
+ else:
+ raise ValueError(f'Attribute type {head.type} not supported.')
+ attribute_loss += att_loss
+
+ return attribute_loss
+
def build_losses(self,
outputs: Mapping[str, Any],
labels: Mapping[str, Any],
aux_losses: Optional[Any] = None):
"""Build RetinaNet losses."""
params = self.task_config
+ attribute_heads = self.task_config.model.head.attribute_heads
+
cls_loss_fn = keras_cv.losses.FocalLoss(
alpha=params.losses.focal_loss_alpha,
gamma=params.losses.focal_loss_gamma,
@@ -170,6 +212,10 @@ def build_losses(self,
model_loss = cls_loss + params.losses.box_loss_weight * box_loss
+ if attribute_heads:
+ model_loss += self.build_attribute_loss(attribute_heads, outputs, labels,
+ box_sample_weight)
+
total_loss = model_loss
if aux_losses:
reg_loss = tf.reduce_sum(aux_losses)
diff --git a/official/vision/detection/executor/distributed_executor.py b/official/vision/detection/executor/distributed_executor.py
index 8f8c861c99f..128271e73ec 100644
--- a/official/vision/detection/executor/distributed_executor.py
+++ b/official/vision/detection/executor/distributed_executor.py
@@ -322,21 +322,21 @@ def _test_step_fn(inputs):
return test_step
- def train(self,
- train_input_fn: Callable[[params_dict.ParamsDict], tf.data.Dataset],
- eval_input_fn: Callable[[params_dict.ParamsDict],
- tf.data.Dataset] = None,
- model_dir: Text = None,
- total_steps: int = 1,
- iterations_per_loop: int = 1,
- train_metric_fn: Callable[[], Any] = None,
- eval_metric_fn: Callable[[], Any] = None,
- summary_writer_fn: Callable[[Text, Text],
- SummaryWriter] = SummaryWriter,
- init_checkpoint: Callable[[tf.keras.Model], Any] = None,
- custom_callbacks: List[tf.keras.callbacks.Callback] = None,
- continuous_eval: bool = False,
- save_config: bool = True):
+ def train(
+ self,
+ train_input_fn: Callable[[params_dict.ParamsDict], tf.data.Dataset],
+ eval_input_fn: Optional[Callable[[params_dict.ParamsDict],
+ tf.data.Dataset]] = None,
+ model_dir: Optional[Text] = None,
+ total_steps: int = 1,
+ iterations_per_loop: int = 1,
+ train_metric_fn: Optional[Callable[[], Any]] = None,
+ eval_metric_fn: Optional[Callable[[], Any]] = None,
+ summary_writer_fn: Callable[[Text, Text], SummaryWriter] = SummaryWriter,
+ init_checkpoint: Optional[Callable[[tf.keras.Model], Any]] = None,
+ custom_callbacks: Optional[List[tf.keras.callbacks.Callback]] = None,
+ continuous_eval: bool = False,
+ save_config: bool = True):
"""Runs distributed training.
Args:
@@ -590,7 +590,7 @@ def evaluate_from_model_dir(
eval_input_fn: Callable[[params_dict.ParamsDict], tf.data.Dataset],
eval_metric_fn: Callable[[], Any],
total_steps: int = -1,
- eval_timeout: int = None,
+ eval_timeout: Optional[int] = None,
min_eval_interval: int = 180,
summary_writer_fn: Callable[[Text, Text], SummaryWriter] = SummaryWriter):
"""Runs distributed evaluation on model folder.
@@ -646,7 +646,7 @@ def evaluate_checkpoint(self,
eval_input_fn: Callable[[params_dict.ParamsDict],
tf.data.Dataset],
eval_metric_fn: Callable[[], Any],
- summary_writer: SummaryWriter = None):
+ summary_writer: Optional[SummaryWriter] = None):
"""Runs distributed evaluation on the one checkpoint.
Args:
diff --git a/official/vision/image_classification/callbacks.py b/official/vision/image_classification/callbacks.py
index 033a2dd714f..cffe605c9fd 100644
--- a/official/vision/image_classification/callbacks.py
+++ b/official/vision/image_classification/callbacks.py
@@ -20,7 +20,7 @@
from __future__ import print_function
import os
-from typing import Any, List, MutableMapping, Text
+from typing import Any, List, MutableMapping, Optional, Text
from absl import logging
import tensorflow as tf
@@ -39,7 +39,7 @@ def get_callbacks(
initial_step: int = 0,
batch_size: int = 0,
log_steps: int = 0,
- model_dir: str = None,
+ model_dir: Optional[str] = None,
backup_and_restore: bool = False) -> List[tf.keras.callbacks.Callback]:
"""Get all callbacks."""
model_dir = model_dir or ''
@@ -120,7 +120,7 @@ def __init__(self,
def on_batch_begin(self,
epoch: int,
- logs: MutableMapping[str, Any] = None) -> None:
+ logs: Optional[MutableMapping[str, Any]] = None) -> None:
self.step += 1
if logs is None:
logs = {}
@@ -129,7 +129,7 @@ def on_batch_begin(self,
def on_epoch_begin(self,
epoch: int,
- logs: MutableMapping[str, Any] = None) -> None:
+ logs: Optional[MutableMapping[str, Any]] = None) -> None:
if logs is None:
logs = {}
metrics = self._calculate_metrics()
@@ -140,7 +140,7 @@ def on_epoch_begin(self,
def on_epoch_end(self,
epoch: int,
- logs: MutableMapping[str, Any] = None) -> None:
+ logs: Optional[MutableMapping[str, Any]] = None) -> None:
if logs is None:
logs = {}
metrics = self._calculate_metrics()
@@ -195,13 +195,13 @@ def set_model(self, model: tf.keras.Model):
optimization.ExponentialMovingAverage)
self.model.optimizer.shadow_copy(self.model)
- def on_test_begin(self, logs: MutableMapping[Text, Any] = None):
+ def on_test_begin(self, logs: Optional[MutableMapping[Text, Any]] = None):
self.model.optimizer.swap_weights()
- def on_test_end(self, logs: MutableMapping[Text, Any] = None):
+ def on_test_end(self, logs: Optional[MutableMapping[Text, Any]] = None):
self.model.optimizer.swap_weights()
- def on_train_end(self, logs: MutableMapping[Text, Any] = None):
+ def on_train_end(self, logs: Optional[MutableMapping[Text, Any]] = None):
if self.overwrite_weights_on_train_end:
self.model.optimizer.assign_average_vars(self.model.variables)
diff --git a/official/vision/image_classification/dataset_factory.py b/official/vision/image_classification/dataset_factory.py
index 463de95c77e..1b8a67fd5fd 100644
--- a/official/vision/image_classification/dataset_factory.py
+++ b/official/vision/image_classification/dataset_factory.py
@@ -280,7 +280,9 @@ def info(self) -> tfds.core.DatasetInfo:
raise e
return self.builder_info
- def build(self, strategy: tf.distribute.Strategy = None) -> tf.data.Dataset:
+ def build(
+ self,
+ strategy: Optional[tf.distribute.Strategy] = None) -> tf.data.Dataset:
"""Construct a dataset end-to-end and return it using an optional strategy.
Args:
@@ -305,7 +307,8 @@ def build(self, strategy: tf.distribute.Strategy = None) -> tf.data.Dataset:
def _build(
self,
- input_context: tf.distribute.InputContext = None) -> tf.data.Dataset:
+ input_context: Optional[tf.distribute.InputContext] = None
+ ) -> tf.data.Dataset:
"""Construct a dataset end-to-end and return it.
Args:
diff --git a/official/vision/image_classification/efficientnet/efficientnet_model.py b/official/vision/image_classification/efficientnet/efficientnet_model.py
index e5f2c2c69fd..c331b080f97 100644
--- a/official/vision/image_classification/efficientnet/efficientnet_model.py
+++ b/official/vision/image_classification/efficientnet/efficientnet_model.py
@@ -160,9 +160,9 @@ def conv2d_block(inputs: tf.Tensor,
strides: Any = (1, 1),
use_batch_norm: bool = True,
use_bias: bool = False,
- activation: Any = None,
+ activation: Optional[Any] = None,
depthwise: bool = False,
- name: Text = None):
+ name: Optional[Text] = None):
"""A conv2d followed by batch norm and an activation."""
batch_norm = common_modules.get_batch_norm(config.batch_norm)
bn_momentum = config.bn_momentum
@@ -212,7 +212,7 @@ def conv2d_block(inputs: tf.Tensor,
def mb_conv_block(inputs: tf.Tensor,
block: BlockConfig,
config: ModelConfig,
- prefix: Text = None):
+ prefix: Optional[Text] = None):
"""Mobile Inverted Residual Bottleneck.
Args:
@@ -432,8 +432,8 @@ class EfficientNet(tf.keras.Model):
"""
def __init__(self,
- config: ModelConfig = None,
- overrides: Dict[Text, Any] = None):
+ config: Optional[ModelConfig] = None,
+ overrides: Optional[Dict[Text, Any]] = None):
"""Create an EfficientNet model.
Args:
@@ -463,9 +463,9 @@ def __init__(self,
@classmethod
def from_name(cls,
model_name: Text,
- model_weights_path: Text = None,
+ model_weights_path: Optional[Text] = None,
weights_format: Text = 'saved_model',
- overrides: Dict[Text, Any] = None):
+ overrides: Optional[Dict[Text, Any]] = None):
"""Construct an EfficientNet model from a predefined model name.
E.g., `EfficientNet.from_name('efficientnet-b0')`.
diff --git a/official/vision/image_classification/optimizer_factory.py b/official/vision/image_classification/optimizer_factory.py
index e3eaba944b5..a0f6c929d57 100644
--- a/official/vision/image_classification/optimizer_factory.py
+++ b/official/vision/image_classification/optimizer_factory.py
@@ -18,7 +18,7 @@
# from __future__ import google_type_annotations
from __future__ import print_function
-from typing import Any, Dict, Text
+from typing import Any, Dict, Optional, Text
from absl import logging
import tensorflow as tf
@@ -35,7 +35,7 @@ def build_optimizer(
optimizer_name: Text,
base_learning_rate: tf.keras.optimizers.schedules.LearningRateSchedule,
params: Dict[Text, Any],
- model: tf.keras.Model = None):
+ model: Optional[tf.keras.Model] = None):
"""Build the optimizer based on name.
Args:
@@ -124,9 +124,9 @@ def build_optimizer(
def build_learning_rate(params: base_configs.LearningRateConfig,
- batch_size: int = None,
- train_epochs: int = None,
- train_steps: int = None):
+ batch_size: Optional[int] = None,
+ train_epochs: Optional[int] = None,
+ train_steps: Optional[int] = None):
"""Build the learning rate given the provided configuration."""
decay_type = params.name
base_lr = params.initial_lr
diff --git a/official/vision/image_classification/preprocessing.py b/official/vision/image_classification/preprocessing.py
index dece1fbc119..6c7f88d61b6 100644
--- a/official/vision/image_classification/preprocessing.py
+++ b/official/vision/image_classification/preprocessing.py
@@ -329,7 +329,7 @@ def load_eval_image(filename: Text, image_size: int = IMAGE_SIZE) -> tf.Tensor:
def build_eval_dataset(filenames: List[Text],
- labels: List[int] = None,
+ labels: Optional[List[int]] = None,
image_size: int = IMAGE_SIZE,
batch_size: int = 1) -> tf.Tensor:
"""Builds a tf.data.Dataset from a list of filenames and labels.
diff --git a/orbit/__init__.py b/orbit/__init__.py
index a97bb719d7a..01442a565d5 100644
--- a/orbit/__init__.py
+++ b/orbit/__init__.py
@@ -14,8 +14,10 @@
"""Defines exported symbols for the `orbit` package."""
+from orbit import actions
from orbit import utils
+from orbit.controller import Action
from orbit.controller import Controller
from orbit.runner import AbstractEvaluator
diff --git a/orbit/actions/__init__.py b/orbit/actions/__init__.py
new file mode 100644
index 00000000000..5c3eab2d8b0
--- /dev/null
+++ b/orbit/actions/__init__.py
@@ -0,0 +1,74 @@
+# Copyright 2021 The Orbit Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+"""Defines an "action" abstraction for use with `orbit.Controller`.
+
+"Actions" are simply arbitrary callables that are applied by the `Controller`
+to the output of train steps (after each inner loop of `steps_per_loop` steps)
+or an evaluation. This provides a hook mechanism, enabling things like reporting
+metrics to Vizier, model exporting, additional logging, etc.
+
+The basic `Action` abstraction (just a type alias) is defined in the
+`controller` module. This `actions` module adds a `ConditionalAction` utility
+class to make it easy to trigger actions conditionally based on reusable
+predicates, as well as a small handful of predefined conditions/actions (in
+particular, a `NewBestMetric` condition and an `ExportSavedModel` action).
+
+One example of using actions to do metric-conditional export:
+
+ new_best_metric = orbit.actions.NewBestMetric('accuracy')
+ export_action = orbit.actions.ConditionalAction(
+ condition=lambda x: x['accuracy'] > 0.9 and new_best_metric(x),
+ action=orbit.actions.ExportSavedModel(
+ model,
+ orbit.actions.ExportFileManager(
+ base_name=f'{FLAGS.model_dir}/saved_model',
+ next_id_fn=trainer.global_step.numpy),
+ signatures=model.infer))
+
+ controller = orbit.Controller(
+ strategy=strategy,
+ trainer=trainer,
+ evaluator=evaluator,
+ eval_actions=[export_action],
+ global_step=trainer.global_step,
+ steps_per_loop=FLAGS.steps_per_loop,
+ checkpoint_manager=checkpoint_manager,
+ summary_interval=1000)
+
+Note: In multi-client settings where each client runs its own `Controller`
+instance, some care should be taken in deciding which clients should run certain
+actions. Isolating actions to an individual client (say client 0) can be
+achieved using `ConditionalAction` as follows:
+
+ client_0_actions = orbit.actions.ConditionalAction(
+ condition=lambda _: client_id() == 0,
+ action=[
+ ...
+ ])
+
+In particular, the `NewBestMetric` condition may be used in multi-client
+settings if all clients are guaranteed to compute the same metric (ensuring this
+is up to client code, not Orbit). However, when saving metrics it may be helpful
+to avoid unnecessary writes by setting the `write_value` parameter to `False`
+for most clients.
+"""
+
+from orbit.actions.conditional_action import ConditionalAction
+
+from orbit.actions.export_saved_model import ExportFileManager
+from orbit.actions.export_saved_model import ExportSavedModel
+
+from orbit.actions.new_best_metric import JSONPersistedValue
+from orbit.actions.new_best_metric import NewBestMetric
diff --git a/orbit/actions/conditional_action.py b/orbit/actions/conditional_action.py
new file mode 100644
index 00000000000..e4b8122270f
--- /dev/null
+++ b/orbit/actions/conditional_action.py
@@ -0,0 +1,60 @@
+# Copyright 2021 The Orbit Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+"""Provides a `ConditionalAction` abstraction."""
+
+from typing import Any, Callable, Sequence, Union
+
+from orbit import controller
+from orbit import runner
+
+import tensorflow as tf
+
+Condition = Callable[[runner.Output], Union[bool, tf.Tensor]]
+
+
+def _as_sequence(maybe_sequence: Union[Any, Sequence[Any]]) -> Sequence[Any]:
+ if isinstance(maybe_sequence, Sequence):
+ return maybe_sequence
+ return [maybe_sequence]
+
+
+class ConditionalAction:
+ """Represents an action that is only taken when a given condition is met.
+
+ This class is itself an `Action` (a callable that can be applied to train or
+ eval outputs), but is intended to make it easier to write modular and reusable
+ conditions by decoupling "when" something whappens (the condition) from "what"
+ happens (the action).
+ """
+
+ def __init__(
+ self,
+ condition: Condition,
+ action: Union[controller.Action, Sequence[controller.Action]],
+ ):
+ """Initializes the instance.
+
+ Args:
+ condition: A callable accepting train or eval outputs and returing a bool.
+ action: The action (or optionally sequence of actions) to perform when
+ `condition` is met.
+ """
+ self.condition = condition
+ self.action = action
+
+ def __call__(self, output: runner.Output) -> None:
+ if self.condition(output):
+ for action in _as_sequence(self.action):
+ action(output)
diff --git a/orbit/actions/conditional_action_test.py b/orbit/actions/conditional_action_test.py
new file mode 100644
index 00000000000..cfcfd0f541b
--- /dev/null
+++ b/orbit/actions/conditional_action_test.py
@@ -0,0 +1,39 @@
+# Copyright 2021 The Orbit Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+"""Tests for orbit.actions.conditional_action."""
+
+from orbit import actions
+
+import tensorflow as tf
+
+
+class ConditionalActionTest(tf.test.TestCase):
+
+ def test_conditional_action(self):
+ # Define a function to raise an AssertionError, since we can't in a lambda.
+ def raise_assertion(arg):
+ raise AssertionError(str(arg))
+
+ conditional_action = actions.ConditionalAction(
+ condition=lambda x: x['value'], action=raise_assertion)
+
+ conditional_action({'value': False}) # Nothing is raised.
+ with self.assertRaises(AssertionError) as ctx:
+ conditional_action({'value': True})
+ self.assertEqual(ctx.exception.message, "{'value': True}")
+
+
+if __name__ == '__main__':
+ tf.test.main()
diff --git a/orbit/actions/export_saved_model.py b/orbit/actions/export_saved_model.py
new file mode 100644
index 00000000000..dd6d74fb8b2
--- /dev/null
+++ b/orbit/actions/export_saved_model.py
@@ -0,0 +1,135 @@
+# Copyright 2021 The Orbit Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+"""Provides the `ExportSavedModel` action and associated helper classes."""
+
+from typing import Callable, Optional
+
+import tensorflow as tf
+
+
+class _CounterIdFn:
+ """Implements a counter-based ID function for `ExportFileManager`."""
+
+ def __init__(self, base_name: str):
+ filenames = tf.io.gfile.glob(f'{base_name}-*')
+ max_counter = -1
+ for filename in filenames:
+ try:
+ _, file_number = filename.rsplit('-', maxsplit=1)
+ max_counter = max(max_counter, int(file_number))
+ except ValueError:
+ continue
+ self.value = max_counter + 1
+
+ def __call__(self):
+ output = self.value
+ self.value += 1
+ return output
+
+
+class ExportFileManager:
+ """Utility class that manages a group of files with a shared base name.
+
+ For actions like SavedModel exporting, there are potentially many different
+ file naming and cleanup strategies that may be desirable. This class provides
+ a basic interface allowing SavedModel export to be decoupled from these
+ details, and a default implementation that should work for many basic
+ scenarios. Users may subclass this class to alter behavior and define more
+ customized naming and cleanup strategies.
+ """
+
+ def __init__(self,
+ base_name: str,
+ max_to_keep: int = 5,
+ next_id_fn: Optional[Callable[[], int]] = None):
+ """Initializes the instance.
+
+ Args:
+ base_name: A shared base name for file names generated by this class.
+ max_to_keep: The maximum number of files matching `base_name` to keep
+ after each call to `cleanup`. The most recent (as determined by file
+ modification time) `max_to_keep` files are preserved; the rest are
+ deleted. If < 0, all files are preserved.
+ next_id_fn: An optional callable that returns integer IDs to append to
+ base name (formatted as `'{base_name}-{id}'`). The order of integers is
+ used to sort files to determine the oldest ones deleted by `clean_up`.
+ If not supplied, a default ID based on an incrementing counter is used.
+ One common alternative maybe be to use the current global step count,
+ for instance passing `next_id_fn=global_step.numpy`.
+ """
+ self._base_name = base_name
+ self._max_to_keep = max_to_keep
+ self._next_id_fn = next_id_fn or _CounterIdFn(base_name)
+
+ @property
+ def managed_files(self):
+ """Returns all files managed by this instance, in sorted order.
+
+ Returns:
+ The list of files matching the `base_name` provided when constructing this
+ `ExportFileManager` instance, sorted in increasing integer order of the
+ IDs returned by `next_id_fn`.
+ """
+
+ def id_key(name):
+ _, id_num = name.rsplit('-', maxsplit=1)
+ return int(id_num)
+
+ filenames = tf.io.gfile.glob(f'{self._base_name}-*')
+ return sorted(filenames, key=id_key)
+
+ def clean_up(self):
+ """Cleans up old files matching `{base_name}-*`.
+
+ The most recent `max_to_keep` files are preserved.
+ """
+ if self._max_to_keep < 0:
+ return
+
+ for filename in self.managed_files[:-self._max_to_keep]:
+ tf.io.gfile.rmtree(filename)
+
+ def next_name(self) -> str:
+ """Returns a new file name based on `base_name` and `next_id_fn()`."""
+ return f'{self._base_name}-{self._next_id_fn()}'
+
+
+class ExportSavedModel:
+ """Action that exports the given model as a SavedModel."""
+
+ def __init__(self,
+ model: tf.Module,
+ file_manager: ExportFileManager,
+ signatures,
+ options: Optional[tf.saved_model.SaveOptions] = None):
+ """Initializes the instance.
+
+ Args:
+ model: The model to export.
+ file_manager: An instance of `ExportFileManager` (or a subclass), that
+ provides file naming and cleanup functionality.
+ signatures: The signatures to forward to `tf.saved_model.save()`.
+ options: Optional options to forward to `tf.saved_model.save()`.
+ """
+ self.model = model
+ self.file_manager = file_manager
+ self.signatures = signatures
+ self.options = options
+
+ def __call__(self, _):
+ """Exports the SavedModel."""
+ export_dir = self.file_manager.next_name()
+ tf.saved_model.save(self.model, export_dir, self.signatures, self.options)
+ self.file_manager.clean_up()
diff --git a/orbit/actions/export_saved_model_test.py b/orbit/actions/export_saved_model_test.py
new file mode 100644
index 00000000000..7ac3f611259
--- /dev/null
+++ b/orbit/actions/export_saved_model_test.py
@@ -0,0 +1,140 @@
+# Copyright 2021 The Orbit Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+"""Tests for orbit.actions.export_saved_model."""
+
+import os
+
+from orbit import actions
+
+import tensorflow as tf
+
+
+def _id_key(name):
+ _, id_num = name.rsplit('-', maxsplit=1)
+ return int(id_num)
+
+
+def _id_sorted_file_base_names(dir_path):
+ return sorted(tf.io.gfile.listdir(dir_path), key=_id_key)
+
+
+class TestModel(tf.Module):
+
+ def __init__(self):
+ self.value = tf.Variable(0)
+
+ @tf.function(input_signature=[])
+ def __call__(self):
+ return self.value
+
+
+class ExportSavedModelTest(tf.test.TestCase):
+
+ def test_export_file_manager_default_ids(self):
+ directory = self.create_tempdir()
+ base_name = os.path.join(directory.full_path, 'basename')
+ manager = actions.ExportFileManager(base_name, max_to_keep=3)
+ self.assertLen(tf.io.gfile.listdir(directory.full_path), 0)
+ directory.create_file(manager.next_name())
+ manager.clean_up() # Shouldn't do anything...
+ self.assertLen(tf.io.gfile.listdir(directory.full_path), 1)
+ directory.create_file(manager.next_name())
+ manager.clean_up() # Shouldn't do anything...
+ self.assertLen(tf.io.gfile.listdir(directory.full_path), 2)
+ directory.create_file(manager.next_name())
+ manager.clean_up() # Shouldn't do anything...
+ self.assertLen(tf.io.gfile.listdir(directory.full_path), 3)
+ directory.create_file(manager.next_name())
+ self.assertLen(tf.io.gfile.listdir(directory.full_path), 4)
+ self.assertEqual(
+ _id_sorted_file_base_names(directory.full_path),
+ ['basename-0', 'basename-1', 'basename-2', 'basename-3'])
+ manager.clean_up() # Should delete file with lowest ID.
+ self.assertEqual(
+ _id_sorted_file_base_names(directory.full_path),
+ ['basename-1', 'basename-2', 'basename-3'])
+ manager = actions.ExportFileManager(base_name, max_to_keep=3)
+ self.assertEqual(os.path.basename(manager.next_name()), 'basename-4')
+
+ def test_export_file_manager_custom_ids(self):
+ directory = self.create_tempdir()
+ base_name = os.path.join(directory.full_path, 'basename')
+
+ id_num = 0
+
+ def next_id():
+ return id_num
+
+ manager = actions.ExportFileManager(
+ base_name, max_to_keep=2, next_id_fn=next_id)
+ self.assertLen(tf.io.gfile.listdir(directory.full_path), 0)
+ id_num = 30
+ directory.create_file(manager.next_name())
+ self.assertLen(tf.io.gfile.listdir(directory.full_path), 1)
+ manager.clean_up() # Shouldn't do anything...
+ self.assertEqual(
+ _id_sorted_file_base_names(directory.full_path), ['basename-30'])
+ id_num = 200
+ directory.create_file(manager.next_name())
+ self.assertLen(tf.io.gfile.listdir(directory.full_path), 2)
+ manager.clean_up() # Shouldn't do anything...
+ self.assertEqual(
+ _id_sorted_file_base_names(directory.full_path),
+ ['basename-30', 'basename-200'])
+ id_num = 1000
+ directory.create_file(manager.next_name())
+ self.assertLen(tf.io.gfile.listdir(directory.full_path), 3)
+ self.assertEqual(
+ _id_sorted_file_base_names(directory.full_path),
+ ['basename-30', 'basename-200', 'basename-1000'])
+ manager.clean_up() # Should delete file with lowest ID.
+ self.assertLen(tf.io.gfile.listdir(directory.full_path), 2)
+ self.assertEqual(
+ _id_sorted_file_base_names(directory.full_path),
+ ['basename-200', 'basename-1000'])
+
+ def test_export_saved_model(self):
+ directory = self.create_tempdir()
+ base_name = os.path.join(directory.full_path, 'basename')
+ file_manager = actions.ExportFileManager(base_name, max_to_keep=2)
+ model = TestModel()
+ export_action = actions.ExportSavedModel(
+ model, file_manager=file_manager, signatures=model.__call__)
+
+ model.value.assign(3)
+ self.assertEqual(model(), 3)
+ self.assertEmpty(file_manager.managed_files)
+ export_action({})
+ self.assertLen(file_manager.managed_files, 1)
+ reloaded_model = tf.saved_model.load(file_manager.managed_files[-1])
+ self.assertEqual(reloaded_model(), 3)
+
+ model.value.assign(5)
+ self.assertEqual(model(), 5)
+ export_action({})
+ self.assertLen(file_manager.managed_files, 2)
+ reloaded_model = tf.saved_model.load(file_manager.managed_files[-1])
+ self.assertEqual(reloaded_model(), 5)
+
+ model.value.assign(7)
+ self.assertEqual(model(), 7)
+ export_action({})
+ self.assertLen(file_manager.managed_files, 2) # Still 2, due to clean up.
+ reloaded_model = tf.saved_model.load(file_manager.managed_files[-1])
+ self.assertEqual(reloaded_model(), 7)
+
+
+if __name__ == '__main__':
+ tf.test.main()
diff --git a/orbit/actions/new_best_metric.py b/orbit/actions/new_best_metric.py
new file mode 100644
index 00000000000..f2a01c80f55
--- /dev/null
+++ b/orbit/actions/new_best_metric.py
@@ -0,0 +1,222 @@
+# Copyright 2021 The Orbit Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+"""Provides the `NewBestMetric` condition and associated helper classes."""
+
+import json
+import os
+import sys
+from typing import Any, Callable, Optional, Union
+import uuid
+
+from orbit import runner
+from orbit import utils
+
+import tensorflow as tf
+
+MetricFn = Callable[[runner.Output], Union[float, tf.Tensor]]
+
+
+class NewBestMetric:
+ """Condition that is satisfied when a new best metric is achieved.
+
+ This class keeps track of the best metric value seen so far, optionally in a
+ persistent (preemption-safe) way.
+
+ Two methods are provided, which each satisfy the `Action` protocol: `test` for
+ only testing whether a new best metric is achieved by a given train/eval
+ output, and `commit`, which both tests and records the new best metric value
+ if it is achieved. These separate methods enable the same `NewBestMetric`
+ instance to be reused as a condition multiple times, and can also provide
+ additional preemption/failure safety. For example, to avoid updating the best
+ metric if a model export fails or is pre-empted:
+
+ new_best_metric = orbit.actions.NewBestMetric(
+ 'accuracy', filename='/model/dir/best_metric')
+ action = orbit.actions.ConditionalAction(
+ condition=new_best_metric.test,
+ action=[
+ orbit.actions.ExportSavedModel(...),
+ new_best_metric.commit
+ ])
+
+ The default `__call__` implementation is equivalent to `commit`.
+
+ This class is safe to use in multi-client settings if all clients can be
+ guaranteed to compute the same metric. However when saving metrics it may be
+ helpful to avoid unnecessary writes by setting the `write_value` parameter to
+ `False` for most clients.
+
+ Attributes:
+ metric: The metric passed to __init__ (may be a string key or a callable
+ that can be applied to train/eval output).
+ higher_is_better: Whether higher metric values are better.
+ """
+
+ def __init__(self,
+ metric: Union[str, MetricFn],
+ higher_is_better: bool = True,
+ filename: Optional[str] = None,
+ write_metric=True):
+ """Initializes the instance.
+
+ Args:
+ metric: Either a string key name to use to look up a metric (assuming the
+ train/eval output is a dictionary), or a callable that accepts the
+ train/eval output and returns a metric value.
+ higher_is_better: Whether higher metric values are better. If `True`, a
+ new best metric is achieved when the metric value is strictly greater
+ than the previous best metric. If `False`, a new best metric is achieved
+ when the metric value is strictly less than the previous best metric.
+ filename: A filename to use for storage of the best metric value seen so
+ far, to allow peristence of the value across preemptions. If `None`
+ (default), values aren't persisted.
+ write_metric: If `filename` is set, this controls whether this instance
+ will write new best metric values to the file, or just read from the
+ file to obtain the initial value. Setting this to `False` for most
+ clients in some multi-client setups can avoid unnecessary file writes.
+ Has no effect if `filename` is `None`.
+ """
+ self.metric = metric
+ self.higher_is_better = higher_is_better
+ float_max = sys.float_info.max
+ self._best_value = JSONPersistedValue(
+ initial_value=-float_max if higher_is_better else float_max,
+ filename=filename,
+ write_value=write_metric)
+
+ def __call__(self, output: runner.Output) -> bool:
+ """Tests `output` and updates the current best value if necessary.
+
+ This is equivalent to `commit` below.
+
+ Args:
+ output: The train or eval output to test.
+
+ Returns:
+ `True` if `output` contains a new best metric value, `False` otherwise.
+ """
+ return self.commit(output)
+
+ def metric_value(self, output: runner.Output) -> float:
+ """Computes the metric value for the given `output`."""
+ if callable(self.metric):
+ value = self.metric(output)
+ else:
+ value = output[self.metric]
+ return float(utils.get_value(value))
+
+ @property
+ def best_value(self) -> float:
+ """Returns the best metric value seen so far."""
+ return self._best_value.read()
+
+ def test(self, output: runner.Output) -> bool:
+ """Tests `output` to see if it contains a new best metric value.
+
+ If `output` does contain a new best metric value, this method does *not*
+ save it (i.e., calling this method multiple times in a row with the same
+ `output` will continue to return `True`).
+
+ Args:
+ output: The train or eval output to test.
+
+ Returns:
+ `True` if `output` contains a new best metric value, `False` otherwise.
+ """
+ metric_value = self.metric_value(output)
+ if self.higher_is_better:
+ if metric_value > self.best_value:
+ return True
+ else: # Lower is better.
+ if metric_value < self.best_value:
+ return True
+ return False
+
+ def commit(self, output: runner.Output) -> bool:
+ """Tests `output` and updates the current best value if necessary.
+
+ Unlike `test` above, if `output` does contain a new best metric value, this
+ method *does* save it (i.e., subsequent calls to this method with the same
+ `output` will return `False`).
+
+ Args:
+ output: The train or eval output to test.
+
+ Returns:
+ `True` if `output` contains a new best metric value, `False` otherwise.
+ """
+
+ if self.test(output):
+ self._best_value.write(self.metric_value(output))
+ return True
+ return False
+
+
+class JSONPersistedValue:
+ """Represents a value that is persisted via a file-based backing store.
+
+ The value must be JSON-serializable. Each time the value is updated, it will
+ be written to the backing file. It is only read from the file at
+ initialization.
+ """
+
+ def __init__(self,
+ initial_value: Any,
+ filename: str,
+ write_value: bool = True):
+ """Initializes the instance.
+
+ Args:
+ initial_value: The initial value to use if no backing file exists or was
+ given. This must be a JSON-serializable value (possibly nested
+ combination of lists, dicts, and primitive values).
+ filename: The path to use for persistent storage of the value. This may be
+ `None`, in which case the value is not stable across preemptions.
+ write_value: If `True`, new values will be written to `filename` on calls
+ to `write()`. If `False`, `filename` is only read once to restore any
+ persisted value, and new values will not be written to it. This can be
+ useful in certain multi-client settings to avoid race conditions or
+ excessive file writes. If `filename` is `None`, this parameter has no
+ effect.
+ """
+ self._value = None
+ self._filename = filename
+ self._write_value = write_value
+
+ if self._filename is not None:
+ if tf.io.gfile.exists(self._filename):
+ if tf.io.gfile.stat(self._filename).length > 0:
+ with tf.io.gfile.GFile(self._filename, 'r') as f:
+ self._value = json.load(f)
+ elif self._write_value:
+ tf.io.gfile.makedirs(os.path.dirname(self._filename))
+
+ if self._value is None:
+ self.write(initial_value)
+
+ def read(self):
+ """Returns the value."""
+ return self._value
+
+ def write(self, value):
+ """Writes the value, updating the backing store if one was provided."""
+ self._value = value
+ if self._filename is not None and self._write_value:
+ # To achieve atomic writes, we first write to a temporary file, and then
+ # rename it to `self._filename`.
+ tmp_filename = f'{self._filename}.tmp.{uuid.uuid4().hex}'
+ with tf.io.gfile.GFile(tmp_filename, 'w') as f:
+ json.dump(self._value, f)
+ tf.io.gfile.rename(tmp_filename, self._filename, overwrite=True)
diff --git a/orbit/actions/new_best_metric_test.py b/orbit/actions/new_best_metric_test.py
new file mode 100644
index 00000000000..aff21fda2c7
--- /dev/null
+++ b/orbit/actions/new_best_metric_test.py
@@ -0,0 +1,94 @@
+# Copyright 2021 The Orbit Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+
+"""Tests for orbit.actions.new_best_metric."""
+
+import os
+
+from orbit import actions
+
+import tensorflow as tf
+
+
+class NewBestMetricTest(tf.test.TestCase):
+
+ def test_new_best_metric_higher_is_better(self):
+ new_best_metric = actions.NewBestMetric(
+ lambda x: x['value'], higher_is_better=True)
+ self.assertTrue(new_best_metric.test({'value': 0.0}))
+ self.assertTrue(new_best_metric.commit({'value': 0.0}))
+ self.assertFalse(new_best_metric.test({'value': 0.0}))
+ self.assertTrue(new_best_metric.test({'value': 1.0}))
+
+ def test_new_best_metric_lower_is_better(self):
+ new_best_metric = actions.NewBestMetric('value', higher_is_better=False)
+ self.assertTrue(new_best_metric.test({'value': 0.0}))
+ self.assertTrue(new_best_metric.commit({'value': 0.0}))
+ self.assertFalse(new_best_metric.test({'value': 0.0}))
+ self.assertTrue(new_best_metric.test({'value': -1.0}))
+
+ def test_new_best_metric_persistence(self):
+ backing_file = self.create_tempfile()
+ new_best_metric = actions.NewBestMetric(
+ 'value',
+ higher_is_better=True,
+ filename=backing_file.full_path,
+ write_metric=False)
+ self.assertTrue(new_best_metric.test({'value': 0.0}))
+ self.assertTrue(new_best_metric.commit({'value': 0.0}))
+ self.assertFalse(new_best_metric.test({'value': 0.0}))
+ new_best_metric = actions.NewBestMetric(
+ 'value', higher_is_better=True, filename=backing_file.full_path)
+ self.assertLess(new_best_metric.best_value, 0.0)
+ self.assertTrue(new_best_metric.commit({'value': 5.0}))
+ self.assertEqual(new_best_metric.best_value, 5.0)
+ new_best_metric = actions.NewBestMetric(
+ 'value', higher_is_better=True, filename=backing_file.full_path)
+ self.assertEqual(new_best_metric.best_value, 5.0)
+
+ def test_json_persisted_value(self):
+ tempfile = self.create_tempfile().full_path
+ value = {'a': 1, 'b': 2}
+ persisted_value = actions.JSONPersistedValue(value, tempfile)
+ # The inital value is used since tempfile is empty.
+ self.assertEqual(persisted_value.read(), value)
+ persisted_value = actions.JSONPersistedValue('ignored', tempfile)
+ # Initial value of 'ignored' is ignored, since there's a value in tempfile.
+ self.assertEqual(persisted_value.read(), value)
+ value = [1, 2, 3]
+ persisted_value.write(value)
+ # Now that a new value is written, it gets read on initialization.
+ persisted_value = actions.JSONPersistedValue(['also ignored'], tempfile)
+ self.assertEqual(persisted_value.read(), value)
+ # Writes can be disabled.
+ persisted_value = actions.JSONPersistedValue(
+ 'ignored', tempfile, write_value=False)
+ self.assertEqual(persisted_value.read(), value)
+ persisted_value.write("won't get persisted")
+ persisted_value = actions.JSONPersistedValue(
+ 'ignored', tempfile, write_value=False)
+ self.assertEqual(persisted_value.read(), value)
+
+ def test_json_persisted_value_create_dirs(self):
+ tempfile = os.path.join(self.create_tempdir().full_path, 'subdir/value')
+ value = {'a': 1, 'b': 2}
+ # The directory is not created if write_value=False.
+ actions.JSONPersistedValue(value, tempfile, write_value=False)
+ self.assertFalse(tf.io.gfile.exists(os.path.dirname(tempfile)))
+ actions.JSONPersistedValue(value, tempfile)
+ self.assertTrue(tf.io.gfile.exists(tempfile))
+
+
+if __name__ == '__main__':
+ tf.test.main()
diff --git a/orbit/controller.py b/orbit/controller.py
index 5242a7a7e42..525331c7ec2 100644
--- a/orbit/controller.py
+++ b/orbit/controller.py
@@ -17,7 +17,7 @@
import pprint
import time
-from typing import Callable, Optional, Union
+from typing import Callable, List, Optional, Union
from absl import logging
@@ -46,6 +46,9 @@ def _format_output(output, indent=4):
return "\n" + "\n".join(lines)
+Action = Callable[[runner.Output], None]
+
+
class Controller:
"""Class that controls the outer loop of model training and evaluation.
@@ -53,10 +56,9 @@ class Controller:
loops are implemented by users in the form of `AbstractTrainer` and
`AbstractEvaluator` subclasses, and define how to run a given number of
training or evaluation steps. The outer loop is provided by this `Controller`,
- and interleaves calls to the user provided inner loops with additional actions
- such as saving checkpoints, running evaluations, and writing summaries
- (depending on the arguments passed to `Controller.__init__` and the method
- being called).
+ and interleaves calls to the user-provided inner loops with additional actions
+ such as saving checkpoints, running evaluations, writing summaries, as well as
+ (optionally) user provided `Action`s (see below).
There are four top-level "outer loops" provided:
@@ -70,6 +72,15 @@ class Controller:
training and evaluation use cases, the internal details and method
implementations are also intended to be simple enough to make subclassing or
other custom outer loop implementations easy to achieve.
+
+ Some additional customization can be achieved by supplying `train_actions` or
+ `eval_actions` when constructing the `Controller`. These are just lists of
+ arbitrary callables that are applied by the `Controller` to the output of
+ train steps (after each inner loop of `steps_per_loop` steps) or an
+ evaluation. This provides a hook mechanism, enabling things like reporting
+ metrics to Vizier, model exporting, additional logging, etc. See the
+ `orbit.actions` package for a small handful of predefined actions and some
+ utility classes that may be useful in defining your own.
"""
def __init__(
@@ -79,6 +90,9 @@ def __init__(
trainer: Optional[runner.AbstractTrainer] = None,
evaluator: Optional[runner.AbstractEvaluator] = None,
strategy: Optional[tf.distribute.Strategy] = None,
+ # Actions
+ train_actions: Optional[List[Action]] = None,
+ eval_actions: Optional[List[Action]] = None,
# Train related
steps_per_loop: Optional[int] = None,
checkpoint_manager: Optional[tf.train.CheckpointManager] = None,
@@ -86,7 +100,8 @@ def __init__(
summary_interval: Optional[int] = None,
summary_dir: Optional[str] = None,
# Evaluation related
- eval_summary_dir: Optional[str] = None):
+ eval_summary_dir: Optional[str] = None,
+ ):
"""Initializes a `Controller` instance.
Note that if `checkpoint_manager` is provided and there are checkpoints in
@@ -110,6 +125,12 @@ def __init__(
strategy: An instance of `tf.distribute.Strategy`. If not provided, the
strategy will be initialized from the current in-scope strategy using
`tf.distribute.get_strategy()`.
+ train_actions: An optional list of `orbit.Action`s to call after each
+ block of `steps_per_loop` training steps are run. These will be called
+ with the output of `trainer.train`.
+ eval_actions: An optional list of `orbit.Action`s to call after each
+ evaluation. These will be called with the output of
+ `evaluator.evaluate`.
steps_per_loop: The number of steps to run in each inner loop of training
(passed as the `num_steps` parameter of `trainer.train`).
checkpoint_manager: An instance of `tf.train.CheckpointManager`. If
@@ -138,6 +159,7 @@ def __init__(
"""
if trainer is None and evaluator is None:
raise ValueError("`trainer` and `evaluator` should not both be `None`.")
+
if trainer is not None:
if steps_per_loop is None:
raise ValueError(
@@ -163,6 +185,9 @@ def __init__(
self.strategy = strategy or tf.distribute.get_strategy()
+ self.train_actions = train_actions or []
+ self.eval_actions = eval_actions or []
+
self.global_step = global_step
self.checkpoint_manager = checkpoint_manager
@@ -255,9 +280,13 @@ def evaluate(self, steps: int = -1) -> Optional[runner.Output]:
with self.eval_summary_manager.summary_writer().as_default():
steps_tensor = tf.convert_to_tensor(steps, dtype=tf.int32)
eval_output = self.evaluator.evaluate(steps_tensor)
- eval_output = tf.nest.map_structure(utils.get_value, eval_output or {})
elapsed = time.time() - start
+ eval_output = eval_output or {}
+ for action in self.eval_actions:
+ action(eval_output)
+ eval_output = tf.nest.map_structure(utils.get_value, eval_output)
+
_log(f" eval | step: {current_step: 6d} | "
f"eval time: {elapsed: 6.1f} sec | "
f"output: {_format_output(eval_output)}")
@@ -338,7 +367,7 @@ def evaluate_continuously(self,
self.restore_checkpoint(checkpoint_path)
self.evaluate(steps)
- def restore_checkpoint(self, checkpoint_path: str = None):
+ def restore_checkpoint(self, checkpoint_path: Optional[str] = None):
"""Restores the model from a checkpoint.
Args:
@@ -408,7 +437,6 @@ def _train_n_steps(self, num_steps: int):
with tf.summary.record_if(should_record):
num_steps_tensor = tf.convert_to_tensor(num_steps, dtype=tf.int32)
train_output = self.trainer.train(num_steps_tensor)
- train_output = tf.nest.map_structure(utils.get_value, train_output or {})
# Verify that global_step was updated properly, then update current_step.
expected_step = current_step + num_steps
@@ -420,6 +448,11 @@ def _train_n_steps(self, num_steps: int):
logging.warning(message)
return
+ train_output = train_output or {}
+ for action in self.train_actions:
+ action(train_output)
+ train_output = tf.nest.map_structure(utils.get_value, train_output)
+
current_step = expected_step
steps_per_second = self.step_timer.steps_per_second()
_log(f"train | step: {current_step: 6d} | "
diff --git a/orbit/controller_test.py b/orbit/controller_test.py
index b4620b83bd7..fd1d1b8b87c 100644
--- a/orbit/controller_test.py
+++ b/orbit/controller_test.py
@@ -583,7 +583,7 @@ def test_early_stop_on_eval_loss(self):
test_runner = TestRunner()
class EarlyStopController(controller.Controller):
- """A subclass of Controller supports early stopping."""
+ """A subclass of Controller that supports early stopping."""
def train_and_evaluate(self,
train_steps: int = None,
@@ -724,5 +724,52 @@ def test_evaluate_with_nested_summaries(self):
summaries_with_matching_keyword(
"accuracy", os.path.join(self.model_dir, "dataset2")))
+ def test_actions(self):
+ test_runner = TestRunner()
+ checkpoint = tf.train.Checkpoint(
+ model=test_runner.model, optimizer=test_runner.optimizer)
+ checkpoint_manager = tf.train.CheckpointManager(
+ checkpoint,
+ self.model_dir,
+ max_to_keep=None,
+ step_counter=test_runner.global_step,
+ checkpoint_interval=10)
+
+ class OutputRecorderAction:
+ """Simple `Action` that just saves the outputs passed to `__call__`."""
+
+ def __init__(self):
+ self.outputs = []
+
+ def __call__(self, output):
+ self.outputs.append(output)
+
+ train_output_recorder = OutputRecorderAction()
+ eval_output_recorder = OutputRecorderAction()
+
+ test_controller = controller.Controller(
+ trainer=test_runner,
+ evaluator=test_runner,
+ train_actions=[train_output_recorder],
+ eval_actions=[eval_output_recorder],
+ global_step=test_runner.global_step,
+ steps_per_loop=2,
+ summary_dir=os.path.join(self.model_dir, "summaries/train"),
+ checkpoint_manager=checkpoint_manager,
+ eval_summary_dir=os.path.join(self.model_dir, "summaries/eval"))
+ test_controller.train_and_evaluate(
+ train_steps=10, eval_steps=2, eval_interval=6)
+
+ self.assertLen(train_output_recorder.outputs, 5)
+ for output in train_output_recorder.outputs:
+ self.assertIn("loss", output)
+ self.assertGreaterEqual(output["loss"], 0)
+
+ self.assertLen(eval_output_recorder.outputs, 2)
+ for output in eval_output_recorder.outputs:
+ self.assertIn("eval_loss", output)
+ self.assertGreaterEqual(output["eval_loss"], 0)
+
+
if __name__ == "__main__":
tf.test.main()
diff --git a/orbit/standard_runner.py b/orbit/standard_runner.py
index ac03707a0f7..d6ea757af00 100644
--- a/orbit/standard_runner.py
+++ b/orbit/standard_runner.py
@@ -83,7 +83,9 @@ class StandardTrainer(runner.AbstractTrainer, metaclass=abc.ABCMeta):
`tf.function`, as determined by the `options` passed to `__init__`.
"""
- def __init__(self, train_dataset, options: StandardTrainerOptions = None):
+ def __init__(self,
+ train_dataset,
+ options: Optional[StandardTrainerOptions] = None):
"""Initializes the `StandardTrainer` instance.
Args:
@@ -256,7 +258,9 @@ class StandardEvaluator(runner.AbstractEvaluator, metaclass=abc.ABCMeta):
is recommended in this case.
"""
- def __init__(self, eval_dataset, options: StandardEvaluatorOptions = None):
+ def __init__(self,
+ eval_dataset,
+ options: Optional[StandardEvaluatorOptions] = None):
"""Initializes the `StandardEvaluator` instance.
Args:
@@ -403,7 +407,7 @@ def eval_end(self, *args) -> Optional[runner.Output]:
pass
def eval_reduce(self,
- state: Any = None,
+ state: Optional[Any] = None,
step_outputs: Optional[runner.Output] = None) -> Any:
"""A function to perform per-step reduction on the evaluation outputs.
diff --git a/research/audioset/vggish/README.md b/research/audioset/vggish/README.md
index d20e5587af4..ec5bf4bd0c4 100644
--- a/research/audioset/vggish/README.md
+++ b/research/audioset/vggish/README.md
@@ -170,8 +170,7 @@ the postprocessor can be run after inference.
If you don't need to use the released embeddings or YouTube-8M, then you could
skip postprocessing and use raw embeddings.
-A [Colab](https://colab.research.google.com/)
-showing how to download the model and calculate the embeddings on your
+A Colab showing how to download the model and calculate the embeddings on your
own sound data is available here:
-[AudioSet Embedding Colab](https://colab.research.google.com/drive/1TbX92UL9sYWbdwdGE0rJ9owmezB-Rl1C).
+[VGGish Embedding Colab](https://colab.research.google.com/drive/1E3CaPAqCai9P9QhJ3WYPNCVmrJU4lAhF).
diff --git a/research/delf/delf/python/training/model/delf_model.py b/research/delf/delf/python/training/model/delf_model.py
index 5cdad73babb..9d770ba4fd1 100644
--- a/research/delf/delf/python/training/model/delf_model.py
+++ b/research/delf/delf/python/training/model/delf_model.py
@@ -35,6 +35,8 @@ class AttentionModel(tf.keras.Model):
Uses two [kernel_size x kernel_size] convolutions and softplus as activation
to compute an attention map with the same resolution as the featuremap.
Features l2-normalized and aggregated using attention probabilites as weights.
+ The features (targets) to be aggregated can be the input featuremap, or a
+ different one with the same resolution.
"""
def __init__(self, kernel_size=1, decay=_DECAY, name='attention'):
@@ -65,7 +67,7 @@ def __init__(self, kernel_size=1, decay=_DECAY, name='attention'):
name='attn_conv2')
self.activation_layer = layers.Activation('softplus')
- def call(self, inputs, training=True):
+ def call(self, inputs, targets=None, training=True):
x = self.conv1(inputs)
x = self.bn_conv1(x, training=training)
x = tf.nn.relu(x)
@@ -73,9 +75,13 @@ def call(self, inputs, training=True):
score = self.conv2(x)
prob = self.activation_layer(score)
+ # Aggregate inputs if targets is None.
+ if targets is None:
+ targets = inputs
+
# L2-normalize the featuremap before pooling.
- inputs = tf.nn.l2_normalize(inputs, axis=-1)
- feat = tf.reduce_mean(tf.multiply(inputs, prob), [1, 2], keepdims=False)
+ targets = tf.nn.l2_normalize(targets, axis=-1)
+ feat = tf.reduce_mean(tf.multiply(targets, prob), [1, 2], keepdims=False)
return feat, prob, score
@@ -208,8 +214,10 @@ def global_and_local_forward_pass(self, images, training=True):
block3 = tf.stop_gradient(block3)
if self._use_dim_reduction:
(dim_expanded_features, dim_reduced_features) = self.autoencoder(block3)
- attn_prelogits, attn_scores, _ = self.attention(dim_expanded_features,
- training=training)
+ attn_prelogits, attn_scores, _ = self.attention(
+ block3,
+ targets=dim_expanded_features,
+ training=training)
else:
attn_prelogits, attn_scores, _ = self.attention(block3, training=training)
dim_expanded_features = None
diff --git a/research/delf/delf/python/training/model/delg_model_test.py b/research/delf/delf/python/training/model/delg_model_test.py
new file mode 100644
index 00000000000..3ac2ec5ad24
--- /dev/null
+++ b/research/delf/delf/python/training/model/delg_model_test.py
@@ -0,0 +1,151 @@
+# Lint as: python3
+# Copyright 2021 The TensorFlow Authors. All Rights Reserved.
+#
+# Licensed under the Apache License, Version 2.0 (the "License");
+# you may not use this file except in compliance with the License.
+# You may obtain a copy of the License at
+#
+# http://www.apache.org/licenses/LICENSE-2.0
+#
+# Unless required by applicable law or agreed to in writing, software
+# distributed under the License is distributed on an "AS IS" BASIS,
+# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+# See the License for the specific language governing permissions and
+# limitations under the License.
+# ==============================================================================
+"""Tests for the DELG model."""
+
+from __future__ import absolute_import
+from __future__ import division
+from __future__ import print_function
+
+from absl.testing import parameterized
+import tensorflow as tf
+
+from delf.python.training.model import delg_model
+
+
+class DelgTest(tf.test.TestCase, parameterized.TestCase):
+
+ @parameterized.named_parameters(
+ ('block3_stridesTrue', True),
+ ('block3_stridesFalse', False),
+ )
+ def test_forward_pass(self, block3_strides):
+ image_size = 321
+ num_classes = 1000
+ batch_size = 2
+ input_shape = (batch_size, image_size, image_size, 3)
+ local_feature_dim = 64
+ feature_map_size = image_size // 16 # reduction factor for resnet50.
+ if block3_strides:
+ feature_map_size //= 2
+
+ model = delg_model.Delg(block3_strides=block3_strides,
+ use_dim_reduction=True,
+ reduced_dimension=local_feature_dim)
+ model.init_classifiers(num_classes)
+
+ images = tf.random.uniform(input_shape, minval=-1.0, maxval=1.0, seed=0)
+
+ # Run a complete forward pass of the model.
+ global_feature, attn_scores, local_features = model.build_call(images)
+
+ self.assertAllEqual(global_feature.shape, (batch_size, 2048))
+ self.assertAllEqual(
+ attn_scores.shape,
+ (batch_size, feature_map_size, feature_map_size, 1))
+ self.assertAllEqual(
+ local_features.shape,
+ (batch_size, feature_map_size, feature_map_size, local_feature_dim))
+
+ @parameterized.named_parameters(
+ ('block3_stridesTrue', True),
+ ('block3_stridesFalse', False),
+ )
+ def test_build_model(self, block3_strides):
+ image_size = 321
+ num_classes = 1000
+ batch_size = 2
+ input_shape = (batch_size, image_size, image_size, 3)
+
+ model = delg_model.Delg(
+ block3_strides=block3_strides,
+ use_dim_reduction=True)
+ model.init_classifiers(num_classes)
+
+ images = tf.random.uniform(input_shape, minval=-1.0, maxval=1.0, seed=0)
+ labels = tf.random.uniform((batch_size,),
+ minval=0,
+ maxval=model.num_classes - 1,
+ dtype=tf.int64)
+ blocks = {}
+
+ desc_prelogits = model.backbone(
+ images, intermediates_dict=blocks, training=False)
+ desc_logits = model.desc_classification(desc_prelogits, labels)
+ self.assertAllEqual(desc_prelogits.shape, (batch_size, 2048))
+ self.assertAllEqual(desc_logits.shape, (batch_size, num_classes))
+
+ features = blocks['block3']
+ attn_prelogits, _, _ = model.attention(features)
+ attn_logits = model.attn_classification(attn_prelogits)
+ self.assertAllEqual(attn_prelogits.shape, (batch_size, 1024))
+ self.assertAllEqual(attn_logits.shape, (batch_size, num_classes))
+
+ @parameterized.named_parameters(
+ ('block3_stridesTrue', True),
+ ('block3_stridesFalse', False),
+ )
+ def test_train_step(self, block3_strides):
+ image_size = 321
+ num_classes = 1000
+ batch_size = 2
+ clip_val = 10.0
+ input_shape = (batch_size, image_size, image_size, 3)
+
+ model = delg_model.Delg(
+ block3_strides=block3_strides,
+ use_dim_reduction=True)
+ model.init_classifiers(num_classes)
+
+ optimizer = tf.keras.optimizers.SGD(learning_rate=0.001, momentum=0.9)
+
+ images = tf.random.uniform(input_shape, minval=0.0, maxval=1.0, seed=0)
+ labels = tf.random.uniform((batch_size,),
+ minval=0,
+ maxval=model.num_classes - 1,
+ dtype=tf.int64)
+
+ loss_object = tf.keras.losses.SparseCategoricalCrossentropy(
+ from_logits=True, reduction=tf.keras.losses.Reduction.NONE)
+
+ def compute_loss(labels, predictions):
+ per_example_loss = loss_object(labels, predictions)
+ return tf.nn.compute_average_loss(
+ per_example_loss, global_batch_size=batch_size)
+
+ with tf.GradientTape() as gradient_tape:
+ (desc_prelogits, attn_prelogits, _, backbone_blocks,
+ dim_expanded_features, _) = model.global_and_local_forward_pass(images)
+ # Calculate global loss by applying the descriptor classifier.
+ desc_logits = model.desc_classification(desc_prelogits, labels)
+ desc_loss = compute_loss(labels, desc_logits)
+ # Calculate attention loss by applying the attention block classifier.
+ attn_logits = model.attn_classification(attn_prelogits)
+ attn_loss = compute_loss(labels, attn_logits)
+ # Calculate reconstruction loss between the attention prelogits and the
+ # backbone.
+ block3 = tf.stop_gradient(backbone_blocks['block3'])
+ reconstruction_loss = tf.math.reduce_mean(
+ tf.keras.losses.MSE(block3, dim_expanded_features))
+ # Cumulate global loss and attention loss and backpropagate through the
+ # descriptor layer and attention layer together.
+ total_loss = desc_loss + attn_loss + reconstruction_loss
+ gradients = gradient_tape.gradient(total_loss, model.trainable_weights)
+ clipped, _ = tf.clip_by_global_norm(gradients, clip_norm=clip_val)
+ optimizer.apply_gradients(zip(clipped, model.trainable_weights))
+
+
+if __name__ == '__main__':
+ tf.test.main()
diff --git a/research/object_detection/builders/model_builder.py b/research/object_detection/builders/model_builder.py
index bf2eeebb790..b1d97a9a790 100644
--- a/research/object_detection/builders/model_builder.py
+++ b/research/object_detection/builders/model_builder.py
@@ -926,11 +926,27 @@ def object_detection_proto_to_params(od_config):
losses_pb2.WeightedSigmoidClassificationLoss())
loss.localization_loss.CopyFrom(od_config.localization_loss)
_, localization_loss, _, _, _, _, _ = (losses_builder.build(loss))
+ if od_config.HasField('scale_head_params'):
+ scale_head_num_filters = list(od_config.scale_head_params.num_filters)
+ scale_head_kernel_sizes = list(od_config.scale_head_params.kernel_sizes)
+ else:
+ scale_head_num_filters = [256]
+ scale_head_kernel_sizes = [3]
+ if od_config.HasField('offset_head_params'):
+ offset_head_num_filters = list(od_config.offset_head_params.num_filters)
+ offset_head_kernel_sizes = list(od_config.offset_head_params.kernel_sizes)
+ else:
+ offset_head_num_filters = [256]
+ offset_head_kernel_sizes = [3]
return center_net_meta_arch.ObjectDetectionParams(
localization_loss=localization_loss,
scale_loss_weight=od_config.scale_loss_weight,
offset_loss_weight=od_config.offset_loss_weight,
- task_loss_weight=od_config.task_loss_weight)
+ task_loss_weight=od_config.task_loss_weight,
+ scale_head_num_filters=scale_head_num_filters,
+ scale_head_kernel_sizes=scale_head_kernel_sizes,
+ offset_head_num_filters=offset_head_num_filters,
+ offset_head_kernel_sizes=offset_head_kernel_sizes)
def object_center_proto_to_params(oc_config):
@@ -973,13 +989,21 @@ def mask_proto_to_params(mask_config):
losses_pb2.WeightedL2LocalizationLoss())
loss.classification_loss.CopyFrom(mask_config.classification_loss)
classification_loss, _, _, _, _, _, _ = (losses_builder.build(loss))
+ if mask_config.HasField('mask_head_params'):
+ mask_head_num_filters = list(mask_config.mask_head_params.num_filters)
+ mask_head_kernel_sizes = list(mask_config.mask_head_params.kernel_sizes)
+ else:
+ mask_head_num_filters = [256]
+ mask_head_kernel_sizes = [3]
return center_net_meta_arch.MaskParams(
classification_loss=classification_loss,
task_loss_weight=mask_config.task_loss_weight,
mask_height=mask_config.mask_height,
mask_width=mask_config.mask_width,
score_threshold=mask_config.score_threshold,
- heatmap_bias_init=mask_config.heatmap_bias_init)
+ heatmap_bias_init=mask_config.heatmap_bias_init,
+ mask_head_num_filters=mask_head_num_filters,
+ mask_head_kernel_sizes=mask_head_kernel_sizes)
def densepose_proto_to_params(densepose_config):
diff --git a/research/object_detection/builders/model_builder_tf2_test.py b/research/object_detection/builders/model_builder_tf2_test.py
index 5b3aa302bea..4c55dad67b5 100644
--- a/research/object_detection/builders/model_builder_tf2_test.py
+++ b/research/object_detection/builders/model_builder_tf2_test.py
@@ -188,7 +188,7 @@ def get_fake_object_center_from_keypoints_proto(self):
return text_format.Merge(proto_txt,
center_net_pb2.CenterNet.ObjectCenterParams())
- def get_fake_object_detection_proto(self):
+ def get_fake_object_detection_proto(self, customize_head_params=False):
proto_txt = """
task_loss_weight: 0.5
offset_loss_weight: 0.1
@@ -198,10 +198,19 @@ def get_fake_object_detection_proto(self):
}
}
"""
+ if customize_head_params:
+ proto_txt += """
+ scale_head_params {
+ num_filters: 128
+ num_filters: 64
+ kernel_sizes: 5
+ kernel_sizes: 3
+ }
+ """
return text_format.Merge(proto_txt,
center_net_pb2.CenterNet.ObjectDetection())
- def get_fake_mask_proto(self):
+ def get_fake_mask_proto(self, customize_head_params=False):
proto_txt = """
task_loss_weight: 0.7
classification_loss {
@@ -212,6 +221,15 @@ def get_fake_mask_proto(self):
score_threshold: 0.7
heatmap_bias_init: -2.0
"""
+ if customize_head_params:
+ proto_txt += """
+ mask_head_params {
+ num_filters: 128
+ num_filters: 64
+ kernel_sizes: 5
+ kernel_sizes: 3
+ }
+ """
return text_format.Merge(proto_txt,
center_net_pb2.CenterNet.MaskEstimation())
@@ -266,14 +284,16 @@ def test_create_center_net_model(self, customize_head_params):
self.get_fake_object_center_proto(
customize_head_params=customize_head_params))
config.center_net.object_detection_task.CopyFrom(
- self.get_fake_object_detection_proto())
+ self.get_fake_object_detection_proto(
+ customize_head_params=customize_head_params))
config.center_net.keypoint_estimation_task.append(
self.get_fake_keypoint_proto(
customize_head_params=customize_head_params))
config.center_net.keypoint_label_map_path = (
self.get_fake_label_map_file_path())
config.center_net.mask_estimation_task.CopyFrom(
- self.get_fake_mask_proto())
+ self.get_fake_mask_proto(
+ customize_head_params=customize_head_params))
config.center_net.densepose_estimation_task.CopyFrom(
self.get_fake_densepose_proto())
@@ -303,6 +323,14 @@ def test_create_center_net_model(self, customize_head_params):
self.assertAlmostEqual(model._od_params.task_loss_weight, 0.5)
self.assertIsInstance(model._od_params.localization_loss,
losses.L1LocalizationLoss)
+ self.assertEqual(model._od_params.offset_head_num_filters, [256])
+ self.assertEqual(model._od_params.offset_head_kernel_sizes, [3])
+ if customize_head_params:
+ self.assertEqual(model._od_params.scale_head_num_filters, [128, 64])
+ self.assertEqual(model._od_params.scale_head_kernel_sizes, [5, 3])
+ else:
+ self.assertEqual(model._od_params.scale_head_num_filters, [256])
+ self.assertEqual(model._od_params.scale_head_kernel_sizes, [3])
# Check keypoint estimation related parameters.
kp_params = model._kp_params_dict['human_pose']
@@ -352,6 +380,12 @@ def test_create_center_net_model(self, customize_head_params):
self.assertAlmostEqual(model._mask_params.score_threshold, 0.7)
self.assertAlmostEqual(
model._mask_params.heatmap_bias_init, -2.0, places=4)
+ if customize_head_params:
+ self.assertEqual(model._mask_params.mask_head_num_filters, [128, 64])
+ self.assertEqual(model._mask_params.mask_head_kernel_sizes, [5, 3])
+ else:
+ self.assertEqual(model._mask_params.mask_head_num_filters, [256])
+ self.assertEqual(model._mask_params.mask_head_kernel_sizes, [3])
# Check DensePose related parameters.
self.assertEqual(model._densepose_params.class_id, 0)
diff --git a/research/object_detection/colab_tutorials/convert_odt_model_to_TFLite.ipynb b/research/object_detection/colab_tutorials/convert_odt_model_to_TFLite.ipynb
new file mode 100644
index 00000000000..37f0ab841e4
--- /dev/null
+++ b/research/object_detection/colab_tutorials/convert_odt_model_to_TFLite.ipynb
@@ -0,0 +1,413 @@
+{
+ "cells": [
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "RD3uxzaJweYr"
+ },
+ "source": [
+ "##### Copyright 2021 The TensorFlow Authors."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "cellView": "form",
+ "id": "C-vBUz5IhJs8"
+ },
+ "outputs": [],
+ "source": [
+ "#@title Licensed under the Apache License, Version 2.0 (the \"License\");\n",
+ "# you may not use this file except in compliance with the License.\n",
+ "# You may obtain a copy of the License at\n",
+ "#\n",
+ "# https://www.apache.org/licenses/LICENSE-2.0\n",
+ "#\n",
+ "# Unless required by applicable law or agreed to in writing, software\n",
+ "# distributed under the License is distributed on an \"AS IS\" BASIS,\n",
+ "# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.\n",
+ "# See the License for the specific language governing permissions and\n",
+ "# limitations under the License."
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "pHTibyMehTvH"
+ },
+ "source": [
+ "# Tutorial: Convert models trained using TensorFlow Object Detection API to TensorFlow Lite\n",
+ "\n",
+ "This tutorial demonstrate these steps:\n",
+ "* Convert TensorFlow models trained using the TensorFlow Object Detection API to [TensorFlow Lite](https://www.tensorflow.org/lite).\n",
+ "* Add the required metadata using [TFLite Metadata Writer API](https://www.tensorflow.org/lite/convert/metadata_writer_tutorial#object_detectors). This will make the TFLite model compatible with [TFLite Task Library](https://www.tensorflow.org/lite/inference_with_metadata/task_library/object_detector), so that the model can be integrated in mobile apps in 3 lines of code."
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "QIR1IFpnLJJA"
+ },
+ "source": [
+ "\u003ctable align=\"left\"\u003e\u003ctd\u003e\n",
+ " \u003ca target=\"_blank\" href=\"https://colab.sandbox.google.com/github/tensorflow/models/blob/master/research/object_detection/colab_tutorials/convert_odt_model_to_TFLite.ipynb\"\u003e\n",
+ " \u003cimg src=\"https://www.tensorflow.org/images/colab_logo_32px.png\" /\u003eRun in Google Colab\n",
+ " \u003c/a\u003e\n",
+ "\u003c/td\u003e\u003ctd\u003e\n",
+ " \u003ca target=\"_blank\" href=\"https://github.com/tensorflow/models/blob/master/research/object_detection/colab_tutorials/convert_odt_model_to_TFLite.ipynb\"\u003e\n",
+ " \u003cimg width=32px src=\"https://www.tensorflow.org/images/GitHub-Mark-32px.png\" /\u003eView source on GitHub\u003c/a\u003e\n",
+ "\u003c/td\u003e\u003c/table\u003e"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "Ok_Rpv7XNaFJ"
+ },
+ "source": [
+ "## Preparation"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "t7CAW5C1cmel"
+ },
+ "source": [
+ "### Install the TFLite Support Library"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "DwtFa0jSnNU4"
+ },
+ "outputs": [],
+ "source": [
+ "!pip install -q tflite_support"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "XRfJR9QXctAR"
+ },
+ "source": [
+ "### Install the TensorFlow Object Detection API\n"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "7PP2P5XAqeI5"
+ },
+ "outputs": [],
+ "source": [
+ "import os\n",
+ "import pathlib\n",
+ "\n",
+ "# Clone the tensorflow models repository if it doesn't already exist\n",
+ "if \"models\" in pathlib.Path.cwd().parts:\n",
+ " while \"models\" in pathlib.Path.cwd().parts:\n",
+ " os.chdir('..')\n",
+ "elif not pathlib.Path('models').exists():\n",
+ " !git clone --depth 1 https://github.com/tensorflow/models"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "bP6SSh6zqi07"
+ },
+ "outputs": [],
+ "source": [
+ "%%bash\n",
+ "cd models/research/\n",
+ "protoc object_detection/protos/*.proto --python_out=.\n",
+ "cp object_detection/packages/tf2/setup.py .\n",
+ "pip install -q ."
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "i0to7aXKc0O9"
+ },
+ "source": [
+ "### Import the necessary libraries"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "4M8CC1PgqnSf"
+ },
+ "outputs": [],
+ "source": [
+ "import matplotlib\n",
+ "import matplotlib.pyplot as plt\n",
+ "\n",
+ "import os\n",
+ "import random\n",
+ "import io\n",
+ "import imageio\n",
+ "import glob\n",
+ "import scipy.misc\n",
+ "import numpy as np\n",
+ "from six import BytesIO\n",
+ "from PIL import Image, ImageDraw, ImageFont\n",
+ "from IPython.display import display, Javascript\n",
+ "from IPython.display import Image as IPyImage\n",
+ "\n",
+ "import tensorflow as tf\n",
+ "\n",
+ "from object_detection.utils import label_map_util\n",
+ "from object_detection.utils import config_util\n",
+ "from object_detection.utils import visualization_utils as viz_utils\n",
+ "from object_detection.utils import colab_utils\n",
+ "from object_detection.utils import config_util\n",
+ "from object_detection.builders import model_builder\n",
+ "\n",
+ "%matplotlib inline"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "s9WIOOMTNti5"
+ },
+ "source": [
+ "## Download a pretrained model from Model Zoo\n",
+ "\n",
+ "In this tutorial, we demonstrate converting a pretrained model `SSD MobileNet V2 FPNLite 640x640` in the [TensorFlow 2 Model Zoo](https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/tf2_detection_zoo.md). You can replace the model with your own model and the rest will work the same."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "TIY3cxDgsxuZ"
+ },
+ "outputs": [],
+ "source": [
+ "!wget http://download.tensorflow.org/models/object_detection/tf2/20200711/ssd_mobilenet_v2_fpnlite_640x640_coco17_tpu-8.tar.gz\n",
+ "!tar -xf ssd_mobilenet_v2_fpnlite_640x640_coco17_tpu-8.tar.gz\n",
+ "!rm ssd_mobilenet_v2_fpnlite_640x640_coco17_tpu-8.tar.gz"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "0gV8vr6nN-z9"
+ },
+ "source": [
+ "## Generate TensorFlow Lite Model"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "Z8FjeSmmxpXz"
+ },
+ "source": [
+ "### Step 1: Export TFLite inference graph\n",
+ "\n",
+ "First, we invoke `export_tflite_graph_tf2.py` to generate a TFLite-friendly intermediate SavedModel. This will then be passed to the TensorFlow Lite Converter for generating the final model.\n",
+ "\n",
+ "Use `--help` with the above script to get the full list of supported parameters.\n",
+ "These can fine-tune accuracy and speed for your model."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "ChfN-tzBXqko"
+ },
+ "outputs": [],
+ "source": [
+ "!python models/research/object_detection/export_tflite_graph_tf2.py \\\n",
+ " --trained_checkpoint_dir {'ssd_mobilenet_v2_fpnlite_640x640_coco17_tpu-8/checkpoint'} \\\n",
+ " --output_directory {'ssd_mobilenet_v2_fpnlite_640x640_coco17_tpu-8/tflite'} \\\n",
+ " --pipeline_config_path {'ssd_mobilenet_v2_fpnlite_640x640_coco17_tpu-8/pipeline.config'}"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "IPr06cZ3OY3H"
+ },
+ "source": [
+ "### Step 2: Convert to TFLite\n",
+ "\n",
+ "Use the [TensorFlow Lite Converter](https://www.tensorflow.org/lite/convert) to\n",
+ "convert the `SavedModel` to TFLite. Note that you need to use `from_saved_model`\n",
+ "for TFLite conversion with the Python API.\n",
+ "\n",
+ "You can also leverage\n",
+ "[Post-training Quantization](https://www.tensorflow.org/lite/performance/post_training_quantization)\n",
+ "to\n",
+ "[optimize performance](https://www.tensorflow.org/lite/performance/model_optimization)\n",
+ "and obtain a smaller model. In this tutorial, we use the [dynamic range quantization](https://www.tensorflow.org/lite/performance/post_training_quant)."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "JMpy3Rlpq-Yq"
+ },
+ "outputs": [],
+ "source": [
+ "_TFLITE_MODEL_PATH = \"ssd_mobilenet_v2_fpnlite_640x640_coco17_tpu-8/model.tflite\"\n",
+ "\n",
+ "converter = tf.lite.TFLiteConverter.from_saved_model('ssd_mobilenet_v2_fpnlite_640x640_coco17_tpu-8/tflite/saved_model')\n",
+ "converter.optimizations = [tf.lite.Optimize.DEFAULT]\n",
+ "tflite_model = converter.convert()\n",
+ "\n",
+ "with open(_TFLITE_MODEL_PATH, 'wb') as f:\n",
+ " f.write(tflite_model)"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "fyjlnmaEOtKp"
+ },
+ "source": [
+ "### Step 3: Add Metadata\n",
+ "\n",
+ "The model needs to be packed with [TFLite Metadata](https://www.tensorflow.org/lite/convert/metadata) to enable easy integration into mobile apps using the [TFLite Task Library](https://www.tensorflow.org/lite/inference_with_metadata/task_library/object_detector). This metadata helps the inference code perform the correct pre \u0026 post processing as required by the model. Use the following code to create the metadata."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "-ecGLG_Ovjcr"
+ },
+ "outputs": [],
+ "source": [
+ "# Download the COCO dataset label map that was used to trained the SSD MobileNet V2 FPNLite 640x640 model\n",
+ "!wget https://raw.githubusercontent.com/tensorflow/models/master/research/object_detection/data/mscoco_label_map.pbtxt -q\n",
+ "\n",
+ "# We need to convert the Object Detection API's labelmap into what the Task API needs:\n",
+ "# a txt file with one class name on each line from index 0 to N.\n",
+ "# The first '0' class indicates the background.\n",
+ "# This code assumes COCO detection which has 90 classes, you can write a label\n",
+ "# map file for your model if re-trained.\n",
+ "_ODT_LABEL_MAP_PATH = 'mscoco_label_map.pbtxt'\n",
+ "_TFLITE_LABEL_PATH = \"ssd_mobilenet_v2_fpnlite_640x640_coco17_tpu-8/tflite_label_map.txt\"\n",
+ "\n",
+ "category_index = label_map_util.create_category_index_from_labelmap(\n",
+ " _ODT_LABEL_MAP_PATH)\n",
+ "f = open(_TFLITE_LABEL_PATH, 'w')\n",
+ "for class_id in range(1, 91):\n",
+ " if class_id not in category_index:\n",
+ " f.write('???\\n')\n",
+ " continue\n",
+ " name = category_index[class_id]['name']\n",
+ " f.write(name+'\\n')\n",
+ "f.close()"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "YJSyXq5Qss9X"
+ },
+ "source": [
+ "Then we'll add the label map and other necessary metadata (e.g. normalization config) to the TFLite model.\n",
+ "\n",
+ "As the `SSD MobileNet V2 FPNLite 640x640` model take input image with pixel value in the range of [-1..1] ([code](https://github.com/tensorflow/models/blob/b09e75828e2c65ead9e624a5c7afed8d214247aa/research/object_detection/models/ssd_mobilenet_v2_keras_feature_extractor.py#L132)), we need to set `norm_mean = 127.5` and `norm_std = 127.5`. See this [documentation](https://www.tensorflow.org/lite/convert/metadata#normalization_and_quantization_parameters) for more details on the normalization parameters."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "CRQpfDAWsPeK"
+ },
+ "outputs": [],
+ "source": [
+ "from tflite_support.metadata_writers import object_detector\n",
+ "from tflite_support.metadata_writers import writer_utils\n",
+ "\n",
+ "_TFLITE_MODEL_WITH_METADATA_PATH = \"ssd_mobilenet_v2_fpnlite_640x640_coco17_tpu-8/model_with_metadata.tflite\"\n",
+ "\n",
+ "writer = object_detector.MetadataWriter.create_for_inference(\n",
+ " writer_utils.load_file(_TFLITE_MODEL_PATH), input_norm_mean=[127.5], \n",
+ " input_norm_std=[127.5], label_file_paths=[_TFLITE_LABEL_PATH])\n",
+ "writer_utils.save_file(writer.populate(), _TFLITE_MODEL_WITH_METADATA_PATH)"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "YFEAjRBdPCQb"
+ },
+ "source": [
+ "Optional: Print out the metadata added to the TFLite model."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "FT3-38PJsSOt"
+ },
+ "outputs": [],
+ "source": [
+ "from tflite_support import metadata\n",
+ "\n",
+ "displayer = metadata.MetadataDisplayer.with_model_file(_TFLITE_MODEL_WITH_METADATA_PATH)\n",
+ "print(\"Metadata populated:\")\n",
+ "print(displayer.get_metadata_json())\n",
+ "print(\"=============================\")\n",
+ "print(\"Associated file(s) populated:\")\n",
+ "print(displayer.get_packed_associated_file_list())"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "l7zVslTRnEHX"
+ },
+ "source": [
+ "The TFLite model now can be integrated into a mobile app using the TFLite Task Library. See the [documentation](https://www.tensorflow.org/lite/inference_with_metadata/task_library/object_detector) for more details."
+ ]
+ }
+ ],
+ "metadata": {
+ "colab": {
+ "collapsed_sections": [],
+ "name": "Convert TF Object Detection API model to TFLite.ipynb",
+ "private_outputs": true,
+ "provenance": [
+ {
+ "file_id": "1R4_y-u14YTdvBzhmvC0HQwh3HkcCN2Bd",
+ "timestamp": 1623114733432
+ },
+ {
+ "file_id": "1Rey5kAzNQhJ77tsXGjhcAV0UZ6du0Sla",
+ "timestamp": 1622897882140
+ }
+ ],
+ "toc_visible": true
+ },
+ "kernelspec": {
+ "display_name": "Python 3",
+ "name": "python3"
+ },
+ "language_info": {
+ "name": "python"
+ }
+ },
+ "nbformat": 4,
+ "nbformat_minor": 0
+}
diff --git a/research/object_detection/core/anchor_generator.py b/research/object_detection/core/anchor_generator.py
index 69e29d84db8..e896550a7e9 100644
--- a/research/object_detection/core/anchor_generator.py
+++ b/research/object_detection/core/anchor_generator.py
@@ -37,7 +37,6 @@
from abc import abstractmethod
import six
-from six.moves import zip
import tensorflow.compat.v1 as tf
@@ -107,11 +106,9 @@ def generate(self, feature_map_shape_list, **params):
with tf.name_scope(self.name_scope()):
anchors_list = self._generate(feature_map_shape_list, **params)
if self.check_num_anchors:
- with tf.control_dependencies([
- self._assert_correct_number_of_anchors(
- anchors_list, feature_map_shape_list)]):
- for item in anchors_list:
- item.set(tf.identity(item.get()))
+ for item in anchors_list:
+ item.set(tf.identity(item.get()))
+
return anchors_list
@abstractmethod
@@ -146,26 +143,3 @@ def anchor_index_to_feature_map_index(self, boxlist_list):
feature_map_indices_list.append(
i * tf.ones([boxes.num_boxes()], dtype=tf.int32))
return tf.concat(feature_map_indices_list, axis=0)
-
- def _assert_correct_number_of_anchors(self, anchors_list,
- feature_map_shape_list):
- """Assert that correct number of anchors was generated.
-
- Args:
- anchors_list: A list of box_list.BoxList object holding anchors generated.
- feature_map_shape_list: list of (height, width) pairs in the format
- [(height_0, width_0), (height_1, width_1), ...] that the generated
- anchors must align with.
- Returns:
- Op that raises InvalidArgumentError if the number of anchors does not
- match the number of expected anchors.
- """
- expected_num_anchors = 0
- actual_num_anchors = 0
- for num_anchors_per_location, feature_map_shape, anchors in zip(
- self.num_anchors_per_location(), feature_map_shape_list, anchors_list):
- expected_num_anchors += (num_anchors_per_location
- * feature_map_shape[0]
- * feature_map_shape[1])
- actual_num_anchors += anchors.num_boxes()
- return tf.assert_equal(expected_num_anchors, actual_num_anchors)
diff --git a/research/object_detection/core/model.py b/research/object_detection/core/model.py
index bb96038dabf..46bcb82e670 100644
--- a/research/object_detection/core/model.py
+++ b/research/object_detection/core/model.py
@@ -101,7 +101,7 @@ def groundtruth_lists(self, field):
Args:
field: a string key, options are
- fields.BoxListFields.{boxes,classes,masks,keypoints,
+ fields.BoxListFields.{boxes,classes,masks,mask_weights,keypoints,
keypoint_visibilities, densepose_*, track_ids,
temporal_offsets, track_match_flags}
fields.InputDataFields.is_annotated.
@@ -123,7 +123,7 @@ def groundtruth_has_field(self, field):
Args:
field: a string key, options are
- fields.BoxListFields.{boxes,classes,masks,keypoints,
+ fields.BoxListFields.{boxes,classes,masks,mask_weights,keypoints,
keypoint_visibilities, densepose_*, track_ids} or
fields.InputDataFields.is_annotated.
@@ -299,6 +299,7 @@ def provide_groundtruth(
groundtruth_boxes_list,
groundtruth_classes_list,
groundtruth_masks_list=None,
+ groundtruth_mask_weights_list=None,
groundtruth_keypoints_list=None,
groundtruth_keypoint_visibilities_list=None,
groundtruth_dp_num_points_list=None,
@@ -334,6 +335,8 @@ def provide_groundtruth(
masks with values in {0, 1}. If None, no masks are provided.
Mask resolution `height_in`x`width_in` must agree with the resolution
of the input image tensor provided to the `preprocess` function.
+ groundtruth_mask_weights_list: a list of 1-D tf.float32 tensors of shape
+ [num_boxes] with weights for each instance mask.
groundtruth_keypoints_list: a list of 3-D tf.float32 tensors of
shape [num_boxes, num_keypoints, 2] containing keypoints.
Keypoints are assumed to be provided in normalized coordinates and
@@ -399,6 +402,9 @@ def provide_groundtruth(
if groundtruth_masks_list:
self._groundtruth_lists[
fields.BoxListFields.masks] = groundtruth_masks_list
+ if groundtruth_mask_weights_list:
+ self._groundtruth_lists[
+ fields.BoxListFields.mask_weights] = groundtruth_mask_weights_list
if groundtruth_keypoints_list:
self._groundtruth_lists[
fields.BoxListFields.keypoints] = groundtruth_keypoints_list
diff --git a/research/object_detection/core/preprocessor.py b/research/object_detection/core/preprocessor.py
index 50c37786b86..6d63d86131f 100644
--- a/research/object_detection/core/preprocessor.py
+++ b/research/object_detection/core/preprocessor.py
@@ -1414,6 +1414,7 @@ def _strict_random_crop_image(image,
label_confidences=None,
multiclass_scores=None,
masks=None,
+ mask_weights=None,
keypoints=None,
keypoint_visibilities=None,
densepose_num_points=None,
@@ -1451,6 +1452,8 @@ def _strict_random_crop_image(image,
masks: (optional) rank 3 float32 tensor with shape
[num_instances, height, width] containing instance masks. The masks
are of the same height, width as the input `image`.
+ mask_weights: (optional) rank 1 float32 tensor with shape [num_instances]
+ with instance masks weights.
keypoints: (optional) rank 3 float32 tensor with shape
[num_instances, num_keypoints, 2]. The keypoints are in y-x
normalized coordinates.
@@ -1488,7 +1491,7 @@ def _strict_random_crop_image(image,
Boxes are in normalized form.
labels: new labels.
- If label_weights, multiclass_scores, masks, keypoints,
+ If label_weights, multiclass_scores, masks, mask_weights, keypoints,
keypoint_visibilities, densepose_num_points, densepose_part_ids, or
densepose_surface_coords is not None, the function also returns:
label_weights: rank 1 float32 tensor with shape [num_instances].
@@ -1496,6 +1499,8 @@ def _strict_random_crop_image(image,
[num_instances, num_classes]
masks: rank 3 float32 tensor with shape [num_instances, height, width]
containing instance masks.
+ mask_weights: rank 1 float32 tensor with shape [num_instances] with mask
+ weights.
keypoints: rank 3 float32 tensor with shape
[num_instances, num_keypoints, 2]
keypoint_visibilities: rank 2 bool tensor with shape
@@ -1605,6 +1610,12 @@ def _strict_random_crop_image(image,
0]:im_box_end[0], im_box_begin[1]:im_box_end[1]]
result.append(new_masks)
+ if mask_weights is not None:
+ mask_weights_inside_window = tf.gather(mask_weights, inside_window_ids)
+ mask_weights_completely_inside_window = tf.gather(
+ mask_weights_inside_window, keep_ids)
+ result.append(mask_weights_completely_inside_window)
+
if keypoints is not None:
keypoints_of_boxes_inside_window = tf.gather(keypoints, inside_window_ids)
keypoints_of_boxes_completely_inside_window = tf.gather(
@@ -1654,6 +1665,7 @@ def random_crop_image(image,
label_confidences=None,
multiclass_scores=None,
masks=None,
+ mask_weights=None,
keypoints=None,
keypoint_visibilities=None,
densepose_num_points=None,
@@ -1701,6 +1713,8 @@ def random_crop_image(image,
masks: (optional) rank 3 float32 tensor with shape
[num_instances, height, width] containing instance masks. The masks
are of the same height, width as the input `image`.
+ mask_weights: (optional) rank 1 float32 tensor with shape [num_instances]
+ containing weights for each instance mask.
keypoints: (optional) rank 3 float32 tensor with shape
[num_instances, num_keypoints, 2]. The keypoints are in y-x
normalized coordinates.
@@ -1751,6 +1765,7 @@ def random_crop_image(image,
[num_instances, num_classes]
masks: rank 3 float32 tensor with shape [num_instances, height, width]
containing instance masks.
+ mask_weights: rank 1 float32 tensor with shape [num_instances].
keypoints: rank 3 float32 tensor with shape
[num_instances, num_keypoints, 2]
keypoint_visibilities: rank 2 bool tensor with shape
@@ -1771,6 +1786,7 @@ def strict_random_crop_image_fn():
label_confidences=label_confidences,
multiclass_scores=multiclass_scores,
masks=masks,
+ mask_weights=mask_weights,
keypoints=keypoints,
keypoint_visibilities=keypoint_visibilities,
densepose_num_points=densepose_num_points,
@@ -1803,6 +1819,8 @@ def strict_random_crop_image_fn():
outputs.append(multiclass_scores)
if masks is not None:
outputs.append(masks)
+ if mask_weights is not None:
+ outputs.append(mask_weights)
if keypoints is not None:
outputs.append(keypoints)
if keypoint_visibilities is not None:
@@ -4388,6 +4406,7 @@ def get_default_func_arg_map(include_label_weights=True,
include_label_confidences=False,
include_multiclass_scores=False,
include_instance_masks=False,
+ include_instance_mask_weights=False,
include_keypoints=False,
include_keypoint_visibilities=False,
include_dense_pose=False,
@@ -4403,6 +4422,8 @@ def get_default_func_arg_map(include_label_weights=True,
multiclass scores, too.
include_instance_masks: If True, preprocessing functions will modify the
instance masks, too.
+ include_instance_mask_weights: If True, preprocessing functions will modify
+ the instance mask weights.
include_keypoints: If True, preprocessing functions will modify the
keypoints, too.
include_keypoint_visibilities: If True, preprocessing functions will modify
@@ -4434,6 +4455,11 @@ def get_default_func_arg_map(include_label_weights=True,
groundtruth_instance_masks = (
fields.InputDataFields.groundtruth_instance_masks)
+ groundtruth_instance_mask_weights = None
+ if include_instance_mask_weights:
+ groundtruth_instance_mask_weights = (
+ fields.InputDataFields.groundtruth_instance_mask_weights)
+
groundtruth_keypoints = None
if include_keypoints:
groundtruth_keypoints = fields.InputDataFields.groundtruth_keypoints
@@ -4503,7 +4529,8 @@ def get_default_func_arg_map(include_label_weights=True,
fields.InputDataFields.groundtruth_boxes,
fields.InputDataFields.groundtruth_classes,
groundtruth_label_weights, groundtruth_label_confidences,
- multiclass_scores, groundtruth_instance_masks, groundtruth_keypoints,
+ multiclass_scores, groundtruth_instance_masks,
+ groundtruth_instance_mask_weights, groundtruth_keypoints,
groundtruth_keypoint_visibilities, groundtruth_dp_num_points,
groundtruth_dp_part_ids, groundtruth_dp_surface_coords),
random_pad_image:
diff --git a/research/object_detection/core/preprocessor_test.py b/research/object_detection/core/preprocessor_test.py
index f08de2c5b88..b844a17164b 100644
--- a/research/object_detection/core/preprocessor_test.py
+++ b/research/object_detection/core/preprocessor_test.py
@@ -1894,6 +1894,37 @@ def graph_fn():
self.assertAllClose(
new_boxes.flatten(), expected_boxes.flatten())
+ def testStrictRandomCropImageWithMaskWeights(self):
+ def graph_fn():
+ image = self.createColorfulTestImage()[0]
+ boxes = self.createTestBoxes()
+ labels = self.createTestLabels()
+ weights = self.createTestGroundtruthWeights()
+ masks = tf.random_uniform([2, 200, 400], dtype=tf.float32)
+ mask_weights = tf.constant([1.0, 0.0], dtype=tf.float32)
+ with mock.patch.object(
+ tf.image,
+ 'sample_distorted_bounding_box'
+ ) as mock_sample_distorted_bounding_box:
+ mock_sample_distorted_bounding_box.return_value = (
+ tf.constant([6, 143, 0], dtype=tf.int32),
+ tf.constant([190, 237, -1], dtype=tf.int32),
+ tf.constant([[[0.03, 0.3575, 0.98, 0.95]]], dtype=tf.float32))
+ results = preprocessor._strict_random_crop_image(
+ image, boxes, labels, weights, masks=masks,
+ mask_weights=mask_weights)
+ return results
+ (new_image, new_boxes, _, _,
+ new_masks, new_mask_weights) = self.execute_cpu(graph_fn, [])
+ expected_boxes = np.array(
+ [[0.0, 0.0, 0.75789469, 1.0],
+ [0.23157893, 0.24050637, 0.75789469, 1.0]], dtype=np.float32)
+ self.assertAllEqual(new_image.shape, [190, 237, 3])
+ self.assertAllEqual(new_masks.shape, [2, 190, 237])
+ self.assertAllClose(new_mask_weights, [1.0, 0.0])
+ self.assertAllClose(
+ new_boxes.flatten(), expected_boxes.flatten())
+
def testStrictRandomCropImageWithKeypoints(self):
def graph_fn():
image = self.createColorfulTestImage()[0]
@@ -1947,6 +1978,7 @@ def graph_fn():
labels = self.createTestLabels()
weights = self.createTestGroundtruthWeights()
masks = tf.random_uniform([2, 200, 400], dtype=tf.float32)
+ mask_weights = tf.constant([1.0, 0.0], dtype=tf.float32)
tensor_dict = {
fields.InputDataFields.image: image,
@@ -1954,10 +1986,12 @@ def graph_fn():
fields.InputDataFields.groundtruth_classes: labels,
fields.InputDataFields.groundtruth_weights: weights,
fields.InputDataFields.groundtruth_instance_masks: masks,
+ fields.InputDataFields.groundtruth_instance_mask_weights:
+ mask_weights
}
preprocessor_arg_map = preprocessor.get_default_func_arg_map(
- include_instance_masks=True)
+ include_instance_masks=True, include_instance_mask_weights=True)
preprocessing_options = [(preprocessor.random_crop_image, {})]
@@ -1980,16 +2014,19 @@ def graph_fn():
fields.InputDataFields.groundtruth_classes]
distorted_masks = distorted_tensor_dict[
fields.InputDataFields.groundtruth_instance_masks]
+ distorted_mask_weights = distorted_tensor_dict[
+ fields.InputDataFields.groundtruth_instance_mask_weights]
return [distorted_image, distorted_boxes, distorted_labels,
- distorted_masks]
+ distorted_masks, distorted_mask_weights]
(distorted_image_, distorted_boxes_, distorted_labels_,
- distorted_masks_) = self.execute_cpu(graph_fn, [])
+ distorted_masks_, distorted_mask_weights_) = self.execute_cpu(graph_fn, [])
expected_boxes = np.array([
[0.0, 0.0, 0.75789469, 1.0],
[0.23157893, 0.24050637, 0.75789469, 1.0],
], dtype=np.float32)
self.assertAllEqual(distorted_image_.shape, [1, 190, 237, 3])
self.assertAllEqual(distorted_masks_.shape, [2, 190, 237])
+ self.assertAllClose(distorted_mask_weights_, [1.0, 0.0])
self.assertAllEqual(distorted_labels_, [1, 2])
self.assertAllClose(
distorted_boxes_.flatten(), expected_boxes.flatten())
diff --git a/research/object_detection/core/standard_fields.py b/research/object_detection/core/standard_fields.py
index 1925c550615..2267dff52f8 100644
--- a/research/object_detection/core/standard_fields.py
+++ b/research/object_detection/core/standard_fields.py
@@ -64,6 +64,7 @@ class InputDataFields(object):
proposal_boxes: coordinates of object proposal boxes.
proposal_objectness: objectness score of each proposal.
groundtruth_instance_masks: ground truth instance masks.
+ groundtruth_instance_mask_weights: ground truth instance masks weights.
groundtruth_instance_boundaries: ground truth instance boundaries.
groundtruth_instance_classes: instance mask-level class labels.
groundtruth_keypoints: ground truth keypoints.
@@ -122,6 +123,7 @@ class InputDataFields(object):
proposal_boxes = 'proposal_boxes'
proposal_objectness = 'proposal_objectness'
groundtruth_instance_masks = 'groundtruth_instance_masks'
+ groundtruth_instance_mask_weights = 'groundtruth_instance_mask_weights'
groundtruth_instance_boundaries = 'groundtruth_instance_boundaries'
groundtruth_instance_classes = 'groundtruth_instance_classes'
groundtruth_keypoints = 'groundtruth_keypoints'
@@ -208,6 +210,7 @@ class BoxListFields(object):
weights: sample weights per bounding box.
objectness: objectness score per bounding box.
masks: masks per bounding box.
+ mask_weights: mask weights for each bounding box.
boundaries: boundaries per bounding box.
keypoints: keypoints per bounding box.
keypoint_visibilities: keypoint visibilities per bounding box.
@@ -228,6 +231,7 @@ class BoxListFields(object):
confidences = 'confidences'
objectness = 'objectness'
masks = 'masks'
+ mask_weights = 'mask_weights'
boundaries = 'boundaries'
keypoints = 'keypoints'
keypoint_visibilities = 'keypoint_visibilities'
diff --git a/research/object_detection/core/target_assigner.py b/research/object_detection/core/target_assigner.py
index e491bfcfb59..e2c1707179c 100644
--- a/research/object_detection/core/target_assigner.py
+++ b/research/object_detection/core/target_assigner.py
@@ -1409,8 +1409,10 @@ def assign_keypoint_heatmap_targets(self,
[batch_size, num_keypoints] representing number of instances for each
keypoint type.
valid_mask: A float tensor with shape [batch_size, output_height,
- output_width] where all values within the regions of the blackout boxes
- are 0.0 and 1.0 else where.
+ output_width, num_keypoints] where all values within the regions of the
+ blackout boxes are 0.0 and 1.0 else where. Note that the blackout boxes
+ are per keypoint type and are blacked out if the keypoint
+ visibility/weight (of the corresponding keypoint type) is zero.
"""
out_width = tf.cast(tf.maximum(width // self._stride, 1), tf.float32)
out_height = tf.cast(tf.maximum(height // self._stride, 1), tf.float32)
@@ -1480,13 +1482,17 @@ def assign_keypoint_heatmap_targets(self,
keypoint_std_dev = keypoint_std_dev * tf.stack(
[sigma] * num_keypoints, axis=1)
- # Generate the valid region mask to ignore regions with target class but
- # no corresponding keypoints.
- # Shape: [num_instances].
- blackout = tf.logical_and(classes[:, self._class_id] > 0,
- tf.reduce_max(kp_weights, axis=1) < 1e-3)
- valid_mask = ta_utils.blackout_pixel_weights_by_box_regions(
- out_height, out_width, boxes.get(), blackout)
+ # Generate the per-keypoint type valid region mask to ignore regions
+ # with keypoint weights equal to zeros (e.g. visibility is 0).
+ # shape of valid_mask: [out_height, out_width, num_keypoints]
+ kp_weight_list = tf.unstack(kp_weights, axis=1)
+ valid_mask_channel_list = []
+ for kp_weight in kp_weight_list:
+ blackout = kp_weight < 1e-3
+ valid_mask_channel_list.append(
+ ta_utils.blackout_pixel_weights_by_box_regions(
+ out_height, out_width, boxes.get(), blackout))
+ valid_mask = tf.stack(valid_mask_channel_list, axis=2)
valid_mask_list.append(valid_mask)
# Apply the Gaussian kernel to the keypoint coordinates. Returned heatmap
@@ -2001,8 +2007,8 @@ def __init__(self, stride):
self._stride = stride
def assign_segmentation_targets(
- self, gt_masks_list, gt_classes_list,
- mask_resize_method=ResizeMethod.BILINEAR):
+ self, gt_masks_list, gt_classes_list, gt_boxes_list=None,
+ gt_mask_weights_list=None, mask_resize_method=ResizeMethod.BILINEAR):
"""Computes the segmentation targets.
This utility produces a semantic segmentation mask for each class, starting
@@ -2016,15 +2022,25 @@ def assign_segmentation_targets(
gt_classes_list: A list of float tensors with shape [num_boxes,
num_classes] representing the one-hot encoded class labels for each box
in the gt_boxes_list.
+ gt_boxes_list: An optional list of float tensors with shape [num_boxes, 4]
+ with normalized boxes corresponding to each mask. The boxes are used to
+ spatially allocate mask weights.
+ gt_mask_weights_list: An optional list of float tensors with shape
+ [num_boxes] with weights for each mask. If a mask has a zero weight, it
+ indicates that the box region associated with the mask should not
+ contribute to the loss. If not provided, will use a per-pixel weight of
+ 1.
mask_resize_method: A `tf.compat.v2.image.ResizeMethod`. The method to use
when resizing masks from input resolution to output resolution.
+
Returns:
segmentation_targets: An int32 tensor of size [batch_size, output_height,
output_width, num_classes] representing the class of each location in
the output space.
+ segmentation_weight: A float32 tensor of size [batch_size, output_height,
+ output_width] indicating the loss weight to apply at each location.
"""
- # TODO(ronnyvotel): Handle groundtruth weights.
_, num_classes = shape_utils.combined_static_and_dynamic_shape(
gt_classes_list[0])
@@ -2033,8 +2049,35 @@ def assign_segmentation_targets(
output_height = tf.maximum(input_height // self._stride, 1)
output_width = tf.maximum(input_width // self._stride, 1)
+ if gt_boxes_list is None:
+ gt_boxes_list = [None] * len(gt_masks_list)
+ if gt_mask_weights_list is None:
+ gt_mask_weights_list = [None] * len(gt_masks_list)
+
segmentation_targets_list = []
- for gt_masks, gt_classes in zip(gt_masks_list, gt_classes_list):
+ segmentation_weights_list = []
+
+ for gt_boxes, gt_masks, gt_mask_weights, gt_classes in zip(
+ gt_boxes_list, gt_masks_list, gt_mask_weights_list, gt_classes_list):
+
+ if gt_boxes is not None and gt_mask_weights is not None:
+ boxes = box_list.BoxList(gt_boxes)
+ # Convert the box coordinates to absolute output image dimension space.
+ boxes_absolute = box_list_ops.to_absolute_coordinates(
+ boxes, output_height, output_width)
+
+ # Generate a segmentation weight that applies mask weights in object
+ # regions.
+ blackout = gt_mask_weights <= 0
+ segmentation_weight_for_image = (
+ ta_utils.blackout_pixel_weights_by_box_regions(
+ output_height, output_width, boxes_absolute.get(), blackout,
+ weights=gt_mask_weights))
+ segmentation_weights_list.append(segmentation_weight_for_image)
+ else:
+ segmentation_weights_list.append(tf.ones((output_height, output_width),
+ dtype=tf.float32))
+
gt_masks = _resize_masks(gt_masks, output_height, output_width,
mask_resize_method)
gt_masks = gt_masks[:, :, :, tf.newaxis]
@@ -2047,7 +2090,8 @@ def assign_segmentation_targets(
segmentation_targets_list.append(segmentations_for_image)
segmentation_target = tf.stack(segmentation_targets_list, axis=0)
- return segmentation_target
+ segmentation_weight = tf.stack(segmentation_weights_list, axis=0)
+ return segmentation_target, segmentation_weight
class CenterNetDensePoseTargetAssigner(object):
diff --git a/research/object_detection/core/target_assigner_test.py b/research/object_detection/core/target_assigner_test.py
index ad0eaa82006..e9ac80f6ccb 100644
--- a/research/object_detection/core/target_assigner_test.py
+++ b/research/object_detection/core/target_assigner_test.py
@@ -1699,7 +1699,7 @@ def graph_fn():
np.array([[0.0, 0.0, 0.3, 0.3],
[0.0, 0.0, 0.5, 0.5],
[0.0, 0.0, 0.5, 0.5],
- [0.0, 0.0, 1.0, 1.0]]),
+ [0.5, 0.5, 1.0, 1.0]]),
dtype=tf.float32)
]
@@ -1728,15 +1728,20 @@ def graph_fn():
# Verify the number of instances is correct.
np.testing.assert_array_almost_equal([[0, 1]],
num_instances_batch)
+ self.assertAllEqual([1, 30, 20, 2], valid_mask.shape)
# When calling the function, we specify the class id to be 1 (1th and 3rd)
# instance and the keypoint indices to be [0, 2], meaning that the 1st
# instance is the target class with no valid keypoints in it. As a result,
- # the region of the 1st instance boxing box should be blacked out
- # (0.0, 0.0, 0.5, 0.5), transfering to (0, 0, 15, 10) in absolute output
- # space.
- self.assertAlmostEqual(np.sum(valid_mask[:, 0:16, 0:11]), 0.0)
- # All other values are 1.0 so the sum is: 30 * 20 - 16 * 11 = 424.
- self.assertAlmostEqual(np.sum(valid_mask), 424.0)
+ # the region of both keypoint types of the 1st instance boxing box should be
+ # blacked out (0.0, 0.0, 0.5, 0.5), transfering to (0, 0, 15, 10) in
+ # absolute output space.
+ self.assertAlmostEqual(np.sum(valid_mask[:, 0:15, 0:10, 0:2]), 0.0)
+ # For the 2nd instance, only the 1st keypoint has visibility of 0 so only
+ # the corresponding valid mask contains zeros.
+ self.assertAlmostEqual(np.sum(valid_mask[:, 15:30, 10:20, 0]), 0.0)
+ # All other values are 1.0 so the sum is:
+ # 30 * 20 * 2 - 15 * 10 * 2 - 15 * 10 * 1 = 750.
+ self.assertAlmostEqual(np.sum(valid_mask), 750.0)
def test_assign_keypoints_offset_targets(self):
def graph_fn():
@@ -2090,13 +2095,31 @@ def graph_fn():
tf.constant([[0., 1., 0.],
[0., 1., 0.]], dtype=tf.float32)
]
+ gt_boxes_list = [
+ # Example 0.
+ tf.constant([[0.0, 0.0, 0.5, 0.5],
+ [0.0, 0.5, 0.5, 1.0],
+ [0.0, 0.0, 1.0, 1.0]], dtype=tf.float32),
+ # Example 1.
+ tf.constant([[0.0, 0.0, 1.0, 1.0],
+ [0.5, 0.0, 1.0, 0.5]], dtype=tf.float32)
+ ]
+ gt_mask_weights_list = [
+ # Example 0.
+ tf.constant([0.0, 1.0, 1.0], dtype=tf.float32),
+ # Example 1.
+ tf.constant([1.0, 1.0], dtype=tf.float32)
+ ]
cn_assigner = targetassigner.CenterNetMaskTargetAssigner(stride=2)
- segmentation_target = cn_assigner.assign_segmentation_targets(
- gt_masks_list=gt_masks_list,
- gt_classes_list=gt_classes_list,
- mask_resize_method=targetassigner.ResizeMethod.NEAREST_NEIGHBOR)
- return segmentation_target
- segmentation_target = self.execute(graph_fn, [])
+ segmentation_target, segmentation_weight = (
+ cn_assigner.assign_segmentation_targets(
+ gt_masks_list=gt_masks_list,
+ gt_classes_list=gt_classes_list,
+ gt_boxes_list=gt_boxes_list,
+ gt_mask_weights_list=gt_mask_weights_list,
+ mask_resize_method=targetassigner.ResizeMethod.NEAREST_NEIGHBOR))
+ return segmentation_target, segmentation_weight
+ segmentation_target, segmentation_weight = self.execute(graph_fn, [])
expected_seg_target = np.array([
# Example 0 [[class 0, class 1], [background, class 0]]
@@ -2108,13 +2131,18 @@ def graph_fn():
], dtype=np.float32)
np.testing.assert_array_almost_equal(
expected_seg_target, segmentation_target)
+ expected_seg_weight = np.array([
+ [[0, 1], [1, 1]],
+ [[1, 1], [1, 1]]], dtype=np.float32)
+ np.testing.assert_array_almost_equal(
+ expected_seg_weight, segmentation_weight)
def test_assign_segmentation_targets_no_objects(self):
def graph_fn():
gt_masks_list = [tf.zeros((0, 5, 5))]
gt_classes_list = [tf.zeros((0, 10))]
cn_assigner = targetassigner.CenterNetMaskTargetAssigner(stride=1)
- segmentation_target = cn_assigner.assign_segmentation_targets(
+ segmentation_target, _ = cn_assigner.assign_segmentation_targets(
gt_masks_list=gt_masks_list,
gt_classes_list=gt_classes_list,
mask_resize_method=targetassigner.ResizeMethod.NEAREST_NEIGHBOR)
diff --git a/research/object_detection/data_decoders/tf_example_decoder.py b/research/object_detection/data_decoders/tf_example_decoder.py
index acd48750fd9..0a2060972dd 100644
--- a/research/object_detection/data_decoders/tf_example_decoder.py
+++ b/research/object_detection/data_decoders/tf_example_decoder.py
@@ -373,6 +373,11 @@ def __init__(self,
self._decode_png_instance_masks))
else:
raise ValueError('Did not recognize the `instance_mask_type` option.')
+ self.keys_to_features['image/object/mask/weight'] = (
+ tf.VarLenFeature(tf.float32))
+ self.items_to_handlers[
+ fields.InputDataFields.groundtruth_instance_mask_weights] = (
+ slim_example_decoder.Tensor('image/object/mask/weight'))
if load_dense_pose:
self.keys_to_features['image/object/densepose/num'] = (
tf.VarLenFeature(tf.int64))
@@ -491,6 +496,10 @@ def decode(self, tf_example_string_tensor):
tensor of shape [None, num_keypoints] containing keypoint visibilites.
fields.InputDataFields.groundtruth_instance_masks - 3D float32 tensor of
shape [None, None, None] containing instance masks.
+ fields.InputDataFields.groundtruth_instance_mask_weights - 1D float32
+ tensor of shape [None] containing weights. These are typically values
+ in {0.0, 1.0} which indicate whether to consider the mask related to an
+ object.
fields.InputDataFields.groundtruth_image_classes - 1D int64 of shape
[None] containing classes for the boxes.
fields.InputDataFields.multiclass_scores - 1D float32 tensor of shape
@@ -531,6 +540,21 @@ def default_groundtruth_weights():
0), lambda: tensor_dict[fields.InputDataFields.groundtruth_weights],
default_groundtruth_weights)
+ if fields.InputDataFields.groundtruth_instance_masks in tensor_dict:
+ gt_instance_masks = tensor_dict[
+ fields.InputDataFields.groundtruth_instance_masks]
+ num_gt_instance_masks = tf.shape(gt_instance_masks)[0]
+ gt_instance_mask_weights = tensor_dict[
+ fields.InputDataFields.groundtruth_instance_mask_weights]
+ num_gt_instance_mask_weights = tf.shape(gt_instance_mask_weights)[0]
+ def default_groundtruth_instance_mask_weights():
+ return tf.ones([num_gt_instance_masks], dtype=tf.float32)
+
+ tensor_dict[fields.InputDataFields.groundtruth_instance_mask_weights] = (
+ tf.cond(tf.greater(num_gt_instance_mask_weights, 0),
+ lambda: gt_instance_mask_weights,
+ default_groundtruth_instance_mask_weights))
+
if fields.InputDataFields.groundtruth_keypoints in tensor_dict:
# Set all keypoints that are not labeled to NaN.
gt_kpt_fld = fields.InputDataFields.groundtruth_keypoints
diff --git a/research/object_detection/data_decoders/tf_example_decoder_test.py b/research/object_detection/data_decoders/tf_example_decoder_test.py
index 5311bdf4dfe..f91863e165c 100644
--- a/research/object_detection/data_decoders/tf_example_decoder_test.py
+++ b/research/object_detection/data_decoders/tf_example_decoder_test.py
@@ -1225,6 +1225,9 @@ def graph_fn():
self.assertAllEqual(
instance_masks.astype(np.float32),
tensor_dict[fields.InputDataFields.groundtruth_instance_masks])
+ self.assertAllEqual(
+ tensor_dict[fields.InputDataFields.groundtruth_instance_mask_weights],
+ [1, 1, 1, 1])
self.assertAllEqual(object_classes,
tensor_dict[fields.InputDataFields.groundtruth_classes])
@@ -1272,6 +1275,71 @@ def graph_fn():
self.assertNotIn(fields.InputDataFields.groundtruth_instance_masks,
tensor_dict)
+ def testDecodeInstanceSegmentationWithWeights(self):
+ num_instances = 4
+ image_height = 5
+ image_width = 3
+
+ # Randomly generate image.
+ image_tensor = np.random.randint(
+ 256, size=(image_height, image_width, 3)).astype(np.uint8)
+ encoded_jpeg, _ = self._create_encoded_and_decoded_data(
+ image_tensor, 'jpeg')
+
+ # Randomly generate instance segmentation masks.
+ instance_masks = (
+ np.random.randint(2, size=(num_instances, image_height,
+ image_width)).astype(np.float32))
+ instance_masks_flattened = np.reshape(instance_masks, [-1])
+ instance_mask_weights = np.array([1, 1, 0, 1], dtype=np.float32)
+
+ # Randomly generate class labels for each instance.
+ object_classes = np.random.randint(
+ 100, size=(num_instances)).astype(np.int64)
+
+ def graph_fn():
+ example = tf.train.Example(
+ features=tf.train.Features(
+ feature={
+ 'image/encoded':
+ dataset_util.bytes_feature(encoded_jpeg),
+ 'image/format':
+ dataset_util.bytes_feature(six.b('jpeg')),
+ 'image/height':
+ dataset_util.int64_feature(image_height),
+ 'image/width':
+ dataset_util.int64_feature(image_width),
+ 'image/object/mask':
+ dataset_util.float_list_feature(instance_masks_flattened),
+ 'image/object/mask/weight':
+ dataset_util.float_list_feature(instance_mask_weights),
+ 'image/object/class/label':
+ dataset_util.int64_list_feature(object_classes)
+ })).SerializeToString()
+ example_decoder = tf_example_decoder.TfExampleDecoder(
+ load_instance_masks=True)
+ output = example_decoder.decode(tf.convert_to_tensor(example))
+
+ self.assertAllEqual(
+ (output[fields.InputDataFields.groundtruth_instance_masks].get_shape(
+ ).as_list()), [4, 5, 3])
+ self.assertAllEqual(
+ output[fields.InputDataFields.groundtruth_instance_mask_weights],
+ [1, 1, 0, 1])
+
+ self.assertAllEqual((output[
+ fields.InputDataFields.groundtruth_classes].get_shape().as_list()),
+ [4])
+ return output
+
+ tensor_dict = self.execute_cpu(graph_fn, [])
+
+ self.assertAllEqual(
+ instance_masks.astype(np.float32),
+ tensor_dict[fields.InputDataFields.groundtruth_instance_masks])
+ self.assertAllEqual(object_classes,
+ tensor_dict[fields.InputDataFields.groundtruth_classes])
+
def testDecodeImageLabels(self):
image_tensor = np.random.randint(256, size=(4, 5, 3)).astype(np.uint8)
encoded_jpeg, _ = self._create_encoded_and_decoded_data(
diff --git a/research/object_detection/g3doc/running_on_mobile_tf2.md b/research/object_detection/g3doc/running_on_mobile_tf2.md
index efa335c17b8..fa39bafc5c6 100644
--- a/research/object_detection/g3doc/running_on_mobile_tf2.md
+++ b/research/object_detection/g3doc/running_on_mobile_tf2.md
@@ -13,17 +13,22 @@ on-device machine learning inference with low latency and a small binary size.
TensorFlow Lite uses many techniques for this such as quantized kernels that
allow smaller and faster (fixed-point math) models.
-This document shows how elgible models from the
+This document shows how eligible models from the
[TF2 Detection zoo](https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/tf2_detection_zoo.md)
-can be converted for inference with TFLite.
+can be converted for inference with TFLite. See this Colab tutorial for a
+runnable tutorial that walks you through the steps explained in this document:
+
+ Run
+in Google Colab
For an end-to-end Python guide on how to fine-tune an SSD model for mobile
inference, look at
[this Colab](../colab_tutorials/eager_few_shot_od_training_tflite.ipynb).
**NOTE:** TFLite currently only supports **SSD Architectures** (excluding
-EfficientDet) for boxes-based detection. Support for EfficientDet is coming
-soon.
+EfficientDet) for boxes-based detection. Support for EfficientDet is provided
+via the [TFLite Model Maker](https://www.tensorflow.org/lite/tutorials/model_maker_object_detection)
+library.
The output model has the following inputs & outputs:
@@ -87,9 +92,46 @@ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS_INT8,
converter.representative_dataset = <...>
```
+### Step 3: Add Metadata
+
+The model needs to be packed with
+[TFLite Metadata](https://www.tensorflow.org/lite/convert/metadata) to enable
+easy integration into mobile apps using the
+[TFLite Task Library](https://www.tensorflow.org/lite/inference_with_metadata/task_library/object_detector).
+This metadata helps the inference code perform the correct pre & post processing
+as required by the model. Use the following code to create the metadata.
+
+```python
+from tflite_support.metadata_writers import object_detector
+from tflite_support.metadata_writers import writer_utils
+
+writer = object_detector.MetadataWriter.create_for_inference(
+ writer_utils.load_file(_TFLITE_MODEL_PATH), input_norm_mean=[0],
+ input_norm_std=[255], label_file_paths=[_TFLITE_LABEL_PATH])
+writer_utils.save_file(writer.populate(), _TFLITE_MODEL_WITH_METADATA_PATH)
+```
+
+See the TFLite Metadata Writer API [documentation](https://www.tensorflow.org/lite/convert/metadata_writer_tutorial#object_detectors)
+for more details.
+
## Running our model on Android
-To run our TensorFlow Lite model on device, we will use Android Studio to build
+### Integrate the model into your app
+You can use the TFLite Task Library's [ObjectDetector API](https://www.tensorflow.org/lite/inference_with_metadata/task_library/object_detector)
+to integrate the model into your Android app.
+
+```java
+// Initialization
+ObjectDetectorOptions options = ObjectDetectorOptions.builder().setMaxResults(1).build();
+ObjectDetector objectDetector = ObjectDetector.createFromFileAndOptions(context, modelFile, options);
+
+// Run inference
+List results = objectDetector.detect(image);
+```
+
+### Test the model using the TFLite sample app
+
+To test our TensorFlow Lite model on device, we will use Android Studio to build
and run the TensorFlow Lite detection example with the new model. The example is
found in the
[TensorFlow examples repository](https://github.com/tensorflow/examples) under
@@ -102,7 +144,7 @@ that support API >= 21. Additional details are available on the
Next we need to point the app to our new detect.tflite file and give it the
names of our new labels. Specifically, we will copy our TensorFlow Lite
-flatbuffer to the app assets directory with the following command:
+model with metadata to the app assets directory with the following command:
```shell
mkdir $TF_EXAMPLES/lite/examples/object_detection/android/app/src/main/assets
@@ -110,9 +152,6 @@ cp /tmp/tflite/detect.tflite \
$TF_EXAMPLES/lite/examples/object_detection/android/app/src/main/assets
```
-You will also need to copy your new labelmap labelmap.txt to the assets
-directory.
-
We will now edit the gradle build file to use these assets. First, open the
`build.gradle` file
`$TF_EXAMPLES/lite/examples/object_detection/android/app/build.gradle`. Comment
@@ -122,23 +161,12 @@ out the model download script to avoid your assets being overwritten:
// apply from:'download_model.gradle'
```
-If your model is named `detect.tflite`, and your labels file `labelmap.txt`, the
-example will use them automatically as long as they've been properly copied into
-the base assets directory. If you need to use a custom path or filename, open up
-the
+If your model is named `detect.tflite`, the example will use it automatically as
+long as they've been properly copied into the base assets directory. If you need
+to use a custom path or filename, open up the
$TF_EXAMPLES/lite/examples/object_detection/android/app/src/main/java/org/tensorflow/demo/DetectorActivity.java
-file in a text editor and find the definition of TF_OD_API_LABELS_FILE. Update
-this path to point to your new label map file: "labels_list.txt". Note that if
-your model is quantized, the flag TF_OD_API_IS_QUANTIZED is set to true, and if
-your model is floating point, the flag TF_OD_API_IS_QUANTIZED is set to false.
-This new section of DetectorActivity.java should now look as follows for a
-quantized model:
-
-```java
- private static final boolean TF_OD_API_IS_QUANTIZED = true;
- private static final String TF_OD_API_MODEL_FILE = "detect.tflite";
- private static final String TF_OD_API_LABELS_FILE = "labels_list.txt";
-```
+file in a text editor and find the definition of TF_OD_API_MODEL_FILE. Update
+this path to point to your new model file.
Once you’ve copied the TensorFlow Lite model and edited the gradle build script
to not use the downloaded assets, you can build and deploy the app using the
diff --git a/research/object_detection/inputs.py b/research/object_detection/inputs.py
index bdb219b08cc..e944a7f5e11 100644
--- a/research/object_detection/inputs.py
+++ b/research/object_detection/inputs.py
@@ -479,6 +479,7 @@ def pad_input_data_to_static_shapes(tensor_dict,
input_fields.groundtruth_instance_masks: [
max_num_boxes, height, width
],
+ input_fields.groundtruth_instance_mask_weights: [max_num_boxes],
input_fields.groundtruth_is_crowd: [max_num_boxes],
input_fields.groundtruth_group_of: [max_num_boxes],
input_fields.groundtruth_area: [max_num_boxes],
@@ -601,6 +602,8 @@ def augment_input_data(tensor_dict, data_augmentation_options):
include_instance_masks = (fields.InputDataFields.groundtruth_instance_masks
in tensor_dict)
+ include_instance_mask_weights = (
+ fields.InputDataFields.groundtruth_instance_mask_weights in tensor_dict)
include_keypoints = (fields.InputDataFields.groundtruth_keypoints
in tensor_dict)
include_keypoint_visibilities = (
@@ -624,6 +627,7 @@ def augment_input_data(tensor_dict, data_augmentation_options):
include_label_confidences=include_label_confidences,
include_multiclass_scores=include_multiclass_scores,
include_instance_masks=include_instance_masks,
+ include_instance_mask_weights=include_instance_mask_weights,
include_keypoints=include_keypoints,
include_keypoint_visibilities=include_keypoint_visibilities,
include_dense_pose=include_dense_pose,
@@ -652,6 +656,7 @@ def _get_labels_dict(input_dict):
fields.InputDataFields.groundtruth_keypoint_depths,
fields.InputDataFields.groundtruth_keypoint_depth_weights,
fields.InputDataFields.groundtruth_instance_masks,
+ fields.InputDataFields.groundtruth_instance_mask_weights,
fields.InputDataFields.groundtruth_area,
fields.InputDataFields.groundtruth_is_crowd,
fields.InputDataFields.groundtruth_group_of,
@@ -804,6 +809,9 @@ def train_input(train_config, train_input_config,
labels[fields.InputDataFields.groundtruth_instance_masks] is a
[batch_size, num_boxes, H, W] float32 tensor containing only binary
values, which represent instance masks for objects.
+ labels[fields.InputDataFields.groundtruth_instance_mask_weights] is a
+ [batch_size, num_boxes] float32 tensor containing groundtruth weights
+ for each instance mask.
labels[fields.InputDataFields.groundtruth_keypoints] is a
[batch_size, num_boxes, num_keypoints, 2] float32 tensor containing
keypoints for each box.
@@ -961,6 +969,9 @@ def eval_input(eval_config, eval_input_config, model_config,
labels[fields.InputDataFields.groundtruth_instance_masks] is a
[1, num_boxes, H, W] float32 tensor containing only binary values,
which represent instance masks for objects.
+ labels[fields.InputDataFields.groundtruth_instance_mask_weights] is a
+ [1, num_boxes] float32 tensor containing groundtruth weights for each
+ instance mask.
labels[fields.InputDataFields.groundtruth_weights] is a
[batch_size, num_boxes, num_keypoints] float32 tensor containing
groundtruth weights for the keypoints.
diff --git a/research/object_detection/inputs_test.py b/research/object_detection/inputs_test.py
index 4716882e9a3..ea69717a478 100644
--- a/research/object_detection/inputs_test.py
+++ b/research/object_detection/inputs_test.py
@@ -795,15 +795,20 @@ def graph_fn():
fields.InputDataFields.image:
tf.constant(np.random.rand(10, 10, 3).astype(np.float32)),
fields.InputDataFields.groundtruth_instance_masks:
- tf.constant(np.zeros([2, 10, 10], np.uint8))
+ tf.constant(np.zeros([2, 10, 10], np.uint8)),
+ fields.InputDataFields.groundtruth_instance_mask_weights:
+ tf.constant([1.0, 0.0], np.float32)
}
augmented_tensor_dict = data_augmentation_fn(tensor_dict=tensor_dict)
return (augmented_tensor_dict[fields.InputDataFields.image],
augmented_tensor_dict[fields.InputDataFields.
- groundtruth_instance_masks])
- image, masks = self.execute_cpu(graph_fn, [])
+ groundtruth_instance_masks],
+ augmented_tensor_dict[fields.InputDataFields.
+ groundtruth_instance_mask_weights])
+ image, masks, mask_weights = self.execute_cpu(graph_fn, [])
self.assertAllEqual(image.shape, [20, 20, 3])
self.assertAllEqual(masks.shape, [2, 20, 20])
+ self.assertAllClose(mask_weights, [1.0, 0.0])
def test_include_keypoints_in_data_augmentation(self):
data_augmentation_options = [
diff --git a/research/object_detection/meta_architectures/center_net_meta_arch.py b/research/object_detection/meta_architectures/center_net_meta_arch.py
index e9e84e39644..a523a559b3d 100644
--- a/research/object_detection/meta_architectures/center_net_meta_arch.py
+++ b/research/object_detection/meta_architectures/center_net_meta_arch.py
@@ -1668,7 +1668,9 @@ def predicted_embeddings_at_object_centers(embedding_predictions,
class ObjectDetectionParams(
collections.namedtuple('ObjectDetectionParams', [
'localization_loss', 'scale_loss_weight', 'offset_loss_weight',
- 'task_loss_weight'
+ 'task_loss_weight', 'scale_head_num_filters',
+ 'scale_head_kernel_sizes', 'offset_head_num_filters',
+ 'offset_head_kernel_sizes'
])):
"""Namedtuple to host object detection related parameters.
@@ -1684,7 +1686,11 @@ def __new__(cls,
localization_loss,
scale_loss_weight,
offset_loss_weight,
- task_loss_weight=1.0):
+ task_loss_weight=1.0,
+ scale_head_num_filters=(256),
+ scale_head_kernel_sizes=(3),
+ offset_head_num_filters=(256),
+ offset_head_kernel_sizes=(3)):
"""Constructor with default values for ObjectDetectionParams.
Args:
@@ -1697,13 +1703,23 @@ def __new__(cls,
depending on the input size.
offset_loss_weight: float, The weight for localizing center offsets.
task_loss_weight: float, the weight of the object detection loss.
+ scale_head_num_filters: filter numbers of the convolutional layers used
+ by the object detection box scale prediction head.
+ scale_head_kernel_sizes: kernel size of the convolutional layers used
+ by the object detection box scale prediction head.
+ offset_head_num_filters: filter numbers of the convolutional layers used
+ by the object detection box offset prediction head.
+ offset_head_kernel_sizes: kernel size of the convolutional layers used
+ by the object detection box offset prediction head.
Returns:
An initialized ObjectDetectionParams namedtuple.
"""
return super(ObjectDetectionParams,
cls).__new__(cls, localization_loss, scale_loss_weight,
- offset_loss_weight, task_loss_weight)
+ offset_loss_weight, task_loss_weight,
+ scale_head_num_filters, scale_head_kernel_sizes,
+ offset_head_num_filters, offset_head_kernel_sizes)
class KeypointEstimationParams(
@@ -1937,7 +1953,8 @@ def __new__(cls,
class MaskParams(
collections.namedtuple('MaskParams', [
'classification_loss', 'task_loss_weight', 'mask_height', 'mask_width',
- 'score_threshold', 'heatmap_bias_init'
+ 'score_threshold', 'heatmap_bias_init', 'mask_head_num_filters',
+ 'mask_head_kernel_sizes'
])):
"""Namedtuple to store mask prediction related parameters."""
@@ -1949,7 +1966,9 @@ def __new__(cls,
mask_height=256,
mask_width=256,
score_threshold=0.5,
- heatmap_bias_init=-2.19):
+ heatmap_bias_init=-2.19,
+ mask_head_num_filters=(256),
+ mask_head_kernel_sizes=(3)):
"""Constructor with default values for MaskParams.
Args:
@@ -1963,6 +1982,10 @@ def __new__(cls,
heatmap_bias_init: float, the initial value of bias in the convolutional
kernel of the semantic segmentation prediction head. If set to None, the
bias is initialized with zeros.
+ mask_head_num_filters: filter numbers of the convolutional layers used
+ by the mask prediction head.
+ mask_head_kernel_sizes: kernel size of the convolutional layers used
+ by the mask prediction head.
Returns:
An initialized MaskParams namedtuple.
@@ -1970,7 +1993,8 @@ def __new__(cls,
return super(MaskParams,
cls).__new__(cls, classification_loss,
task_loss_weight, mask_height, mask_width,
- score_threshold, heatmap_bias_init)
+ score_threshold, heatmap_bias_init,
+ mask_head_num_filters, mask_head_kernel_sizes)
class DensePoseParams(
@@ -2312,10 +2336,18 @@ def _construct_prediction_heads(self, num_classes, num_feature_outputs,
if self._od_params is not None:
prediction_heads[BOX_SCALE] = self._make_prediction_net_list(
- num_feature_outputs, NUM_SIZE_CHANNELS, name='box_scale',
+ num_feature_outputs,
+ NUM_SIZE_CHANNELS,
+ kernel_sizes=self._od_params.scale_head_kernel_sizes,
+ num_filters=self._od_params.scale_head_num_filters,
+ name='box_scale',
unit_height_conv=unit_height_conv)
prediction_heads[BOX_OFFSET] = self._make_prediction_net_list(
- num_feature_outputs, NUM_OFFSET_CHANNELS, name='box_offset',
+ num_feature_outputs,
+ NUM_OFFSET_CHANNELS,
+ kernel_sizes=self._od_params.offset_head_kernel_sizes,
+ num_filters=self._od_params.offset_head_num_filters,
+ name='box_offset',
unit_height_conv=unit_height_conv)
if self._kp_params_dict is not None:
@@ -2370,6 +2402,8 @@ def _construct_prediction_heads(self, num_classes, num_feature_outputs,
prediction_heads[SEGMENTATION_HEATMAP] = self._make_prediction_net_list(
num_feature_outputs,
num_classes,
+ kernel_sizes=self._mask_params.mask_head_kernel_sizes,
+ num_filters=self._mask_params.mask_head_num_filters,
bias_fill=self._mask_params.heatmap_bias_init,
name='seg_heatmap',
unit_height_conv=unit_height_conv)
@@ -2721,8 +2755,7 @@ def _compute_kp_heatmap_loss(self, input_height, input_width, task_name,
gt_weights_list=gt_weights_list,
gt_classes_list=gt_classes_list,
gt_boxes_list=gt_boxes_list)
- flattened_valid_mask = _flatten_spatial_dimensions(
- tf.expand_dims(valid_mask_batch, axis=-1))
+ flattened_valid_mask = _flatten_spatial_dimensions(valid_mask_batch)
flattened_heapmap_targets = _flatten_spatial_dimensions(keypoint_heatmap)
# Sum over the number of instances per keypoint types to get the total
# number of keypoints. Note that this is used to normalized the loss and we
@@ -2945,20 +2978,32 @@ def _compute_mask_loss(self, segmentation_predictions,
Returns:
A float scalar tensor representing the mask loss.
"""
+ gt_boxes_list = self.groundtruth_lists(fields.BoxListFields.boxes)
gt_masks_list = self.groundtruth_lists(fields.BoxListFields.masks)
+ gt_mask_weights_list = None
+ if self.groundtruth_has_field(fields.BoxListFields.mask_weights):
+ gt_mask_weights_list = self.groundtruth_lists(
+ fields.BoxListFields.mask_weights)
gt_classes_list = self.groundtruth_lists(fields.BoxListFields.classes)
# Convert the groundtruth to targets.
assigner = self._target_assigner_dict[SEGMENTATION_TASK]
- heatmap_targets = assigner.assign_segmentation_targets(
+ heatmap_targets, heatmap_weight = assigner.assign_segmentation_targets(
gt_masks_list=gt_masks_list,
- gt_classes_list=gt_classes_list)
+ gt_classes_list=gt_classes_list,
+ gt_boxes_list=gt_boxes_list,
+ gt_mask_weights_list=gt_mask_weights_list)
flattened_heatmap_targets = _flatten_spatial_dimensions(heatmap_targets)
+ flattened_heatmap_mask = _flatten_spatial_dimensions(
+ heatmap_weight[:, :, :, tf.newaxis])
+ per_pixel_weights *= flattened_heatmap_mask
loss = 0.0
mask_loss_fn = self._mask_params.classification_loss
- total_pixels_in_loss = tf.reduce_sum(per_pixel_weights)
+
+ total_pixels_in_loss = tf.math.maximum(
+ tf.reduce_sum(per_pixel_weights), 1)
# Loop through each feature output head.
for pred in segmentation_predictions:
diff --git a/research/object_detection/meta_architectures/center_net_meta_arch_tf2_test.py b/research/object_detection/meta_architectures/center_net_meta_arch_tf2_test.py
index 6880f51984f..c88790a720d 100644
--- a/research/object_detection/meta_architectures/center_net_meta_arch_tf2_test.py
+++ b/research/object_detection/meta_architectures/center_net_meta_arch_tf2_test.py
@@ -1539,7 +1539,9 @@ def get_fake_mask_params():
classification_loss=losses.WeightedSoftmaxClassificationLoss(),
task_loss_weight=1.0,
mask_height=4,
- mask_width=4)
+ mask_width=4,
+ mask_head_num_filters=[96],
+ mask_head_kernel_sizes=[3])
def get_fake_densepose_params():
diff --git a/research/object_detection/model_lib.py b/research/object_detection/model_lib.py
index 111be9cb4a7..1a92c469f4c 100644
--- a/research/object_detection/model_lib.py
+++ b/research/object_detection/model_lib.py
@@ -266,6 +266,7 @@ def unstack_batch(tensor_dict, unpad_groundtruth_tensors=True):
# dimension. This list has to be kept in sync with InputDataFields in
# standard_fields.py.
fields.InputDataFields.groundtruth_instance_masks,
+ fields.InputDataFields.groundtruth_instance_mask_weights,
fields.InputDataFields.groundtruth_classes,
fields.InputDataFields.groundtruth_boxes,
fields.InputDataFields.groundtruth_keypoints,
@@ -319,6 +320,10 @@ def provide_groundtruth(model, labels):
if fields.InputDataFields.groundtruth_instance_masks in labels:
gt_masks_list = labels[
fields.InputDataFields.groundtruth_instance_masks]
+ gt_mask_weights_list = None
+ if fields.InputDataFields.groundtruth_instance_mask_weights in labels:
+ gt_mask_weights_list = labels[
+ fields.InputDataFields.groundtruth_instance_mask_weights]
gt_keypoints_list = None
if fields.InputDataFields.groundtruth_keypoints in labels:
gt_keypoints_list = labels[fields.InputDataFields.groundtruth_keypoints]
@@ -383,6 +388,7 @@ def provide_groundtruth(model, labels):
groundtruth_confidences_list=gt_confidences_list,
groundtruth_labeled_classes=gt_labeled_classes,
groundtruth_masks_list=gt_masks_list,
+ groundtruth_mask_weights_list=gt_mask_weights_list,
groundtruth_keypoints_list=gt_keypoints_list,
groundtruth_keypoint_visibilities_list=gt_keypoint_visibilities_list,
groundtruth_dp_num_points_list=gt_dp_num_points_list,
diff --git a/research/object_detection/model_lib_v2.py b/research/object_detection/model_lib_v2.py
index 45d600da779..798c52532e9 100644
--- a/research/object_detection/model_lib_v2.py
+++ b/research/object_detection/model_lib_v2.py
@@ -20,11 +20,11 @@
import copy
import os
+import pprint
import time
-import numpy as np
+import numpy as np
import tensorflow.compat.v1 as tf
-import tensorflow.compat.v2 as tf2
from object_detection import eval_util
from object_detection import inputs
@@ -87,6 +87,8 @@ def _compute_losses_and_predictions_dicts(
labels[fields.InputDataFields.groundtruth_instance_masks] is a
float32 tensor containing only binary values, which represent
instance masks for objects.
+ labels[fields.InputDataFields.groundtruth_instance_mask_weights] is a
+ float32 tensor containing weights for the instance masks.
labels[fields.InputDataFields.groundtruth_keypoints] is a
float32 tensor containing keypoints for each box.
labels[fields.InputDataFields.groundtruth_dp_num_points] is an int32
@@ -181,6 +183,22 @@ def _dummy_computation_fn(features, labels):
))
+def normalize_dict(values_dict, num_replicas):
+
+ num_replicas = tf.constant(num_replicas, dtype=tf.float32)
+ return {key: tf.math.divide(loss, num_replicas) for key, loss
+ in values_dict.items()}
+
+
+def reduce_dict(strategy, reduction_dict, reduction_op):
+ # TODO(anjalisridhar): explore if it is safe to remove the # num_replicas
+ # scaling of the loss and switch this to a ReduceOp.Mean
+ return {
+ name: strategy.reduce(reduction_op, loss, axis=None)
+ for name, loss in reduction_dict.items()
+ }
+
+
# TODO(kaftan): Explore removing learning_rate from this method & returning
## The full losses dict instead of just total_loss, then doing all summaries
## saving in a utility method called by the outer training loop.
@@ -190,10 +208,8 @@ def eager_train_step(detection_model,
labels,
unpad_groundtruth_tensors,
optimizer,
- learning_rate,
add_regularization_loss=True,
clip_gradients_value=None,
- global_step=None,
num_replicas=1.0):
"""Process a single training batch.
@@ -237,6 +253,9 @@ def eager_train_step(detection_model,
labels[fields.InputDataFields.groundtruth_instance_masks] is a
[batch_size, num_boxes, H, W] float32 tensor containing only binary
values, which represent instance masks for objects.
+ labels[fields.InputDataFields.groundtruth_instance_mask_weights] is a
+ [batch_size, num_boxes] float32 tensor containing weights for the
+ instance masks.
labels[fields.InputDataFields.groundtruth_keypoints] is a
[batch_size, num_boxes, num_keypoints, 2] float32 tensor containing
keypoints for each box.
@@ -261,16 +280,10 @@ def eager_train_step(detection_model,
float32 tensor containing the weights of the keypoint depth feature.
unpad_groundtruth_tensors: A parameter passed to unstack_batch.
optimizer: The training optimizer that will update the variables.
- learning_rate: The learning rate tensor for the current training step.
- This is used only for TensorBoard logging purposes, it does not affect
- model training.
add_regularization_loss: Whether or not to include the model's
regularization loss in the losses dictionary.
clip_gradients_value: If this is present, clip the gradients global norm
at this value using `tf.clip_by_global_norm`.
- global_step: The current training step. Used for TensorBoard logging
- purposes. This step is not updated by this function and must be
- incremented separately.
num_replicas: The number of replicas in the current distribution strategy.
This is used to scale the total loss so that training in a distribution
strategy works correctly.
@@ -291,31 +304,18 @@ def eager_train_step(detection_model,
losses_dict, _ = _compute_losses_and_predictions_dicts(
detection_model, features, labels, add_regularization_loss)
- total_loss = losses_dict['Loss/total_loss']
-
- # Normalize loss for num replicas
- total_loss = tf.math.divide(total_loss,
- tf.constant(num_replicas, dtype=tf.float32))
- losses_dict['Loss/normalized_total_loss'] = total_loss
-
- for loss_type in losses_dict:
- tf.compat.v2.summary.scalar(
- loss_type, losses_dict[loss_type], step=global_step)
+ losses_dict = normalize_dict(losses_dict, num_replicas)
trainable_variables = detection_model.trainable_variables
+ total_loss = losses_dict['Loss/total_loss']
gradients = tape.gradient(total_loss, trainable_variables)
if clip_gradients_value:
gradients, _ = tf.clip_by_global_norm(gradients, clip_gradients_value)
optimizer.apply_gradients(zip(gradients, trainable_variables))
- tf.compat.v2.summary.scalar('learning_rate', learning_rate, step=global_step)
- tf.compat.v2.summary.image(
- name='train_input_images',
- step=global_step,
- data=features[fields.InputDataFields.image],
- max_outputs=3)
- return total_loss
+
+ return losses_dict
def validate_tf_v2_checkpoint_restore_map(checkpoint_restore_map):
@@ -397,7 +397,8 @@ def load_fine_tune_checkpoint(model, checkpoint_path, checkpoint_type,
fine_tune_checkpoint_type=checkpoint_type)
validate_tf_v2_checkpoint_restore_map(restore_from_objects_dict)
ckpt = tf.train.Checkpoint(**restore_from_objects_dict)
- ckpt.restore(checkpoint_path).assert_existing_objects_matched()
+ ckpt.restore(
+ checkpoint_path).expect_partial().assert_existing_objects_matched()
def get_filepath(strategy, filepath):
@@ -474,7 +475,12 @@ def train_loop(
Checkpoint every n training steps.
checkpoint_max_to_keep:
int, the number of most recent checkpoints to keep in the model directory.
- record_summaries: Boolean, whether or not to record summaries.
+ record_summaries: Boolean, whether or not to record summaries defined by
+ the model or the training pipeline. This does not impact the summaries
+ of the loss values which are always recorded. Examples of summaries
+ that are controlled by this flag include:
+ - Image summaries of training images.
+ - Intermediate tensors which maybe logged by meta architectures.
performance_summary_exporter: function for exporting performance metrics.
num_steps_per_iteration: int, The number of training steps to perform
in each iteration.
@@ -533,7 +539,8 @@ def train_loop(
strategy = tf.compat.v2.distribute.get_strategy()
with strategy.scope():
detection_model = MODEL_BUILD_UTIL_MAP['detection_model_fn_base'](
- model_config=model_config, is_training=True)
+ model_config=model_config, is_training=True,
+ add_summaries=record_summaries)
def train_dataset_fn(input_context):
"""Callable to create train input."""
@@ -576,11 +583,9 @@ def train_dataset_fn(input_context):
# is the chief.
summary_writer_filepath = get_filepath(strategy,
os.path.join(model_dir, 'train'))
- if record_summaries:
- summary_writer = tf.compat.v2.summary.create_file_writer(
- summary_writer_filepath)
- else:
- summary_writer = tf2.summary.create_noop_writer()
+
+ summary_writer = tf.compat.v2.summary.create_file_writer(
+ summary_writer_filepath)
with summary_writer.as_default():
with strategy.scope():
@@ -614,32 +619,37 @@ def train_dataset_fn(input_context):
def train_step_fn(features, labels):
"""Single train step."""
- loss = eager_train_step(
+
+ if record_summaries:
+ tf.compat.v2.summary.image(
+ name='train_input_images',
+ step=global_step,
+ data=features[fields.InputDataFields.image],
+ max_outputs=3)
+ losses_dict = eager_train_step(
detection_model,
features,
labels,
unpad_groundtruth_tensors,
optimizer,
- learning_rate=learning_rate_fn(),
add_regularization_loss=add_regularization_loss,
clip_gradients_value=clip_gradients_value,
- global_step=global_step,
num_replicas=strategy.num_replicas_in_sync)
global_step.assign_add(1)
- return loss
+ return losses_dict
def _sample_and_train(strategy, train_step_fn, data_iterator):
features, labels = data_iterator.next()
if hasattr(tf.distribute.Strategy, 'run'):
- per_replica_losses = strategy.run(
+ per_replica_losses_dict = strategy.run(
train_step_fn, args=(features, labels))
else:
- per_replica_losses = strategy.experimental_run_v2(
- train_step_fn, args=(features, labels))
- # TODO(anjalisridhar): explore if it is safe to remove the
- ## num_replicas scaling of the loss and switch this to a ReduceOp.Mean
- return strategy.reduce(tf.distribute.ReduceOp.SUM,
- per_replica_losses, axis=None)
+ per_replica_losses_dict = (
+ strategy.experimental_run_v2(
+ train_step_fn, args=(features, labels)))
+
+ return reduce_dict(
+ strategy, per_replica_losses_dict, tf.distribute.ReduceOp.SUM)
@tf.function
def _dist_train_step(data_iterator):
@@ -665,7 +675,7 @@ def _dist_train_step(data_iterator):
for _ in range(global_step.value(), train_steps,
num_steps_per_iteration):
- loss = _dist_train_step(train_input_iter)
+ losses_dict = _dist_train_step(train_input_iter)
time_taken = time.time() - last_step_time
last_step_time = time.time()
@@ -676,11 +686,19 @@ def _dist_train_step(data_iterator):
steps_per_sec_list.append(steps_per_sec)
+ logged_dict = losses_dict.copy()
+ logged_dict['learning_rate'] = learning_rate_fn()
+
+ for key, val in logged_dict.items():
+ tf.compat.v2.summary.scalar(key, val, step=global_step)
+
if global_step.value() - logged_step >= 100:
+ logged_dict_np = {name: value.numpy() for name, value in
+ logged_dict.items()}
tf.logging.info(
- 'Step {} per-step time {:.3f}s loss={:.3f}'.format(
- global_step.value(), time_taken / num_steps_per_iteration,
- loss))
+ 'Step {} per-step time {:.3f}s'.format(
+ global_step.value(), time_taken / num_steps_per_iteration))
+ tf.logging.info(pprint.pformat(logged_dict_np, width=40))
logged_step = global_step.value()
if ((int(global_step.value()) - checkpointed_step) >=
@@ -699,7 +717,7 @@ def _dist_train_step(data_iterator):
'steps_per_sec': np.mean(steps_per_sec_list),
'steps_per_sec_p50': np.median(steps_per_sec_list),
'steps_per_sec_max': max(steps_per_sec_list),
- 'last_batch_loss': float(loss)
+ 'last_batch_loss': float(losses_dict['Loss/total_loss'])
}
mixed_precision = 'bf16' if kwargs['use_bfloat16'] else 'fp32'
performance_summary_exporter(metrics, mixed_precision)
diff --git a/research/object_detection/model_main_tf2.py b/research/object_detection/model_main_tf2.py
index 0cf053039ec..a97bd5901e0 100644
--- a/research/object_detection/model_main_tf2.py
+++ b/research/object_detection/model_main_tf2.py
@@ -65,8 +65,10 @@
flags.DEFINE_integer(
'checkpoint_every_n', 1000, 'Integer defining how often we checkpoint.')
flags.DEFINE_boolean('record_summaries', True,
- ('Whether or not to record summaries during'
- ' training.'))
+ ('Whether or not to record summaries defined by the model'
+ ' or the training pipeline. This does not impact the'
+ ' summaries of the loss values which are always'
+ ' recorded.'))
FLAGS = flags.FLAGS
diff --git a/research/object_detection/models/keras_models/resnet_v1.py b/research/object_detection/models/keras_models/resnet_v1.py
index 62660d4a70d..f57b8bd3468 100644
--- a/research/object_detection/models/keras_models/resnet_v1.py
+++ b/research/object_detection/models/keras_models/resnet_v1.py
@@ -19,9 +19,10 @@
from __future__ import division
from __future__ import print_function
+from keras.applications import resnet
+
import tensorflow.compat.v1 as tf
-from tensorflow.python.keras.applications import resnet
from object_detection.core import freezable_batch_norm
from object_detection.models.keras_models import model_utils
diff --git a/research/object_detection/protos/center_net.proto b/research/object_detection/protos/center_net.proto
index 9e58bf1ad93..fd138e42ce7 100644
--- a/research/object_detection/protos/center_net.proto
+++ b/research/object_detection/protos/center_net.proto
@@ -65,6 +65,14 @@ message CenterNet {
// Localization loss configuration for object scale and offset losses.
optional LocalizationLoss localization_loss = 8;
+
+ // Parameters to determine the architecture of the object scale prediction
+ // head.
+ optional PredictionHeadParams scale_head_params = 9;
+
+ // Parameters to determine the architecture of the object offset prediction
+ // head.
+ optional PredictionHeadParams offset_head_params = 10;
}
optional ObjectDetection object_detection_task = 4;
@@ -268,6 +276,10 @@ message CenterNet {
// prediction head. -2.19 corresponds to predicting foreground with
// a probability of 0.1.
optional float heatmap_bias_init = 3 [default = -2.19];
+
+ // Parameters to determine the architecture of the segmentation mask
+ // prediction head.
+ optional PredictionHeadParams mask_head_params = 7;
}
optional MaskEstimation mask_estimation_task = 8;
diff --git a/research/object_detection/utils/spatial_transform_ops.py b/research/object_detection/utils/spatial_transform_ops.py
index 1880dffea1a..26122dbccb1 100644
--- a/research/object_detection/utils/spatial_transform_ops.py
+++ b/research/object_detection/utils/spatial_transform_ops.py
@@ -19,6 +19,7 @@
from __future__ import print_function
import tensorflow.compat.v1 as tf
+from object_detection.utils import shape_utils
def _coordinate_vector_1d(start, end, size, align_endpoints):
@@ -322,7 +323,7 @@ def multilevel_roi_align(features, boxes, box_levels, output_size,
"""
with tf.name_scope(scope, 'MultiLevelRoIAlign'):
features, true_feature_shapes = pad_to_max_size(features)
- batch_size = tf.shape(features)[0]
+ batch_size = shape_utils.combined_static_and_dynamic_shape(features)[0]
num_levels = features.get_shape().as_list()[1]
max_feature_height = tf.shape(features)[2]
max_feature_width = tf.shape(features)[3]
diff --git a/research/object_detection/utils/target_assigner_utils.py b/research/object_detection/utils/target_assigner_utils.py
index 7ac61e8a84d..dd8c69b9c12 100644
--- a/research/object_detection/utils/target_assigner_utils.py
+++ b/research/object_detection/utils/target_assigner_utils.py
@@ -289,12 +289,38 @@ def get_valid_keypoint_mask_for_class(keypoint_coordinates,
return mask, keypoints_nan_to_zeros
-def blackout_pixel_weights_by_box_regions(height, width, boxes, blackout):
- """Blackout the pixel weights in the target box regions.
+def blackout_pixel_weights_by_box_regions(height, width, boxes, blackout,
+ weights=None):
+ """Apply weights at pixel locations.
This function is used to generate the pixel weight mask (usually in the output
image dimension). The mask is to ignore some regions when computing loss.
+ Weights are applied as follows:
+ - Any region outside of a box gets the default weight 1.0
+ - Any box for which an explicit weight is specifed gets that weight. If
+ multiple boxes overlap, the maximum of the weights is applied.
+ - Any box for which blackout=True is specified will get a weight of 0.0,
+ regardless of whether an equivalent non-zero weight is specified. Also, the
+ blackout region takes precedence over other boxes which may overlap with
+ non-zero weight.
+
+ Example:
+ height = 4
+ width = 4
+ boxes = [[0., 0., 2., 2.],
+ [0., 0., 4., 2.],
+ [3., 0., 4., 4.]]
+ blackout = [False, False, True]
+ weights = [4.0, 3.0, 2.0]
+ blackout_pixel_weights_by_box_regions(height, width, boxes, blackout,
+ weights)
+ >> [[4.0, 4.0, 1.0, 1.0],
+ [4.0, 4.0, 1.0, 1.0],
+ [3.0, 3.0, 1.0, 1.0],
+ [0.0, 0.0, 0.0, 0.0]]
+
+
Args:
height: int, height of the (output) image.
width: int, width of the (output) image.
@@ -302,10 +328,15 @@ def blackout_pixel_weights_by_box_regions(height, width, boxes, blackout):
coordinates of the four corners of the boxes.
blackout: A boolean tensor with shape [num_instances] indicating whether to
blackout (zero-out) the weights within the box regions.
+ weights: An optional float32 tensor with shape [num_instances] indicating
+ a value to apply in each box region. Note that if blackout=True for a
+ given box, the weight will be zero. If None, all weights are assumed to be
+ 1.
Returns:
A float tensor with shape [height, width] where all values within the
- regions of the blackout boxes are 0.0 and 1.0 else where.
+ regions of the blackout boxes are 0.0 and 1.0 (or weights if supplied)
+ elsewhere.
"""
num_instances, _ = shape_utils.combined_static_and_dynamic_shape(boxes)
# If no annotation instance is provided, return all ones (instead of
@@ -323,22 +354,36 @@ def blackout_pixel_weights_by_box_regions(height, width, boxes, blackout):
# Make the mask with all 1.0 in the box regions.
# Shape: [num_instances, height, width]
- in_boxes = tf.cast(
- tf.logical_and(
- tf.logical_and(y_grid >= y_min, y_grid <= y_max),
- tf.logical_and(x_grid >= x_min, x_grid <= x_max)),
- dtype=tf.float32)
-
- # Shape: [num_instances, height, width]
- blackout = tf.tile(
- tf.expand_dims(tf.expand_dims(blackout, axis=-1), axis=-1),
- [1, height, width])
-
- # Select only the boxes specified by blackout.
- selected_in_boxes = tf.where(blackout, in_boxes, tf.zeros_like(in_boxes))
- out_boxes = tf.reduce_max(selected_in_boxes, axis=0)
- out_boxes = tf.ones_like(out_boxes) - out_boxes
- return out_boxes
+ in_boxes = tf.math.logical_and(
+ tf.math.logical_and(y_grid >= y_min, y_grid < y_max),
+ tf.math.logical_and(x_grid >= x_min, x_grid < x_max))
+
+ if weights is None:
+ weights = tf.ones_like(blackout, dtype=tf.float32)
+
+ # Compute a [height, width] tensor with the maximum weight in each box, and
+ # 0.0 elsewhere.
+ weights_tiled = tf.tile(
+ weights[:, tf.newaxis, tf.newaxis], [1, height, width])
+ weights_3d = tf.where(in_boxes, weights_tiled,
+ tf.zeros_like(weights_tiled))
+ weights_2d = tf.math.maximum(
+ tf.math.reduce_max(weights_3d, axis=0), 0.0)
+
+ # Add 1.0 to all regions outside a box.
+ weights_2d = tf.where(
+ tf.math.reduce_any(in_boxes, axis=0),
+ weights_2d,
+ tf.ones_like(weights_2d))
+
+ # Now enforce that blackout regions all have zero weights.
+ keep_region = tf.cast(tf.math.logical_not(blackout), tf.float32)
+ keep_region_tiled = tf.tile(
+ keep_region[:, tf.newaxis, tf.newaxis], [1, height, width])
+ keep_region_3d = tf.where(in_boxes, keep_region_tiled,
+ tf.ones_like(keep_region_tiled))
+ keep_region_2d = tf.math.reduce_min(keep_region_3d, axis=0)
+ return weights_2d * keep_region_2d
def _get_yx_indices_offset_by_radius(radius):
diff --git a/research/object_detection/utils/target_assigner_utils_test.py b/research/object_detection/utils/target_assigner_utils_test.py
index ef0f3420e01..4f35a4463f5 100644
--- a/research/object_detection/utils/target_assigner_utils_test.py
+++ b/research/object_detection/utils/target_assigner_utils_test.py
@@ -196,13 +196,36 @@ def graph_fn():
return output
output = self.execute(graph_fn, [])
- # All zeros in region [0:6, 0:6].
- self.assertAlmostEqual(np.sum(output[0:6, 0:6]), 0.0)
- # All zeros in region [12:19, 6:9].
- self.assertAlmostEqual(np.sum(output[6:9, 12:19]), 0.0)
+ # All zeros in region [0:5, 0:5].
+ self.assertAlmostEqual(np.sum(output[0:5, 0:5]), 0.0)
+ # All zeros in region [12:18, 6:8].
+ self.assertAlmostEqual(np.sum(output[6:8, 12:18]), 0.0)
# All other pixel weights should be 1.0.
- # 20 * 10 - 6 * 6 - 3 * 7 = 143.0
- self.assertAlmostEqual(np.sum(output), 143.0)
+ # 20 * 10 - 5 * 5 - 2 * 6 = 163.0
+ self.assertAlmostEqual(np.sum(output), 163.0)
+
+ def test_blackout_pixel_weights_by_box_regions_with_weights(self):
+ def graph_fn():
+ boxes = tf.constant(
+ [[0.0, 0.0, 2.0, 2.0],
+ [0.0, 0.0, 4.0, 2.0],
+ [3.0, 0.0, 4.0, 4.0]],
+ dtype=tf.float32)
+ blackout = tf.constant([False, False, True], dtype=tf.bool)
+ weights = tf.constant([0.4, 0.3, 0.2], tf.float32)
+ blackout_pixel_weights_by_box_regions = tf.function(
+ ta_utils.blackout_pixel_weights_by_box_regions)
+ output = blackout_pixel_weights_by_box_regions(
+ 4, 4, boxes, blackout, weights)
+ return output
+
+ output = self.execute(graph_fn, [])
+ expected_weights = [
+ [0.4, 0.4, 1.0, 1.0],
+ [0.4, 0.4, 1.0, 1.0],
+ [0.3, 0.3, 1.0, 1.0],
+ [0.0, 0.0, 0.0, 0.0]]
+ np.testing.assert_array_almost_equal(expected_weights, output)
def test_blackout_pixel_weights_by_box_regions_zero_instance(self):
def graph_fn():
Run
+in Google Colab
For an end-to-end Python guide on how to fine-tune an SSD model for mobile
inference, look at
[this Colab](../colab_tutorials/eager_few_shot_od_training_tflite.ipynb).
**NOTE:** TFLite currently only supports **SSD Architectures** (excluding
-EfficientDet) for boxes-based detection. Support for EfficientDet is coming
-soon.
+EfficientDet) for boxes-based detection. Support for EfficientDet is provided
+via the [TFLite Model Maker](https://www.tensorflow.org/lite/tutorials/model_maker_object_detection)
+library.
The output model has the following inputs & outputs:
@@ -87,9 +92,46 @@ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS_INT8,
converter.representative_dataset = <...>
```
+### Step 3: Add Metadata
+
+The model needs to be packed with
+[TFLite Metadata](https://www.tensorflow.org/lite/convert/metadata) to enable
+easy integration into mobile apps using the
+[TFLite Task Library](https://www.tensorflow.org/lite/inference_with_metadata/task_library/object_detector).
+This metadata helps the inference code perform the correct pre & post processing
+as required by the model. Use the following code to create the metadata.
+
+```python
+from tflite_support.metadata_writers import object_detector
+from tflite_support.metadata_writers import writer_utils
+
+writer = object_detector.MetadataWriter.create_for_inference(
+ writer_utils.load_file(_TFLITE_MODEL_PATH), input_norm_mean=[0],
+ input_norm_std=[255], label_file_paths=[_TFLITE_LABEL_PATH])
+writer_utils.save_file(writer.populate(), _TFLITE_MODEL_WITH_METADATA_PATH)
+```
+
+See the TFLite Metadata Writer API [documentation](https://www.tensorflow.org/lite/convert/metadata_writer_tutorial#object_detectors)
+for more details.
+
## Running our model on Android
-To run our TensorFlow Lite model on device, we will use Android Studio to build
+### Integrate the model into your app
+You can use the TFLite Task Library's [ObjectDetector API](https://www.tensorflow.org/lite/inference_with_metadata/task_library/object_detector)
+to integrate the model into your Android app.
+
+```java
+// Initialization
+ObjectDetectorOptions options = ObjectDetectorOptions.builder().setMaxResults(1).build();
+ObjectDetector objectDetector = ObjectDetector.createFromFileAndOptions(context, modelFile, options);
+
+// Run inference
+List results = objectDetector.detect(image);
+```
+
+### Test the model using the TFLite sample app
+
+To test our TensorFlow Lite model on device, we will use Android Studio to build
and run the TensorFlow Lite detection example with the new model. The example is
found in the
[TensorFlow examples repository](https://github.com/tensorflow/examples) under
@@ -102,7 +144,7 @@ that support API >= 21. Additional details are available on the
Next we need to point the app to our new detect.tflite file and give it the
names of our new labels. Specifically, we will copy our TensorFlow Lite
-flatbuffer to the app assets directory with the following command:
+model with metadata to the app assets directory with the following command:
```shell
mkdir $TF_EXAMPLES/lite/examples/object_detection/android/app/src/main/assets
@@ -110,9 +152,6 @@ cp /tmp/tflite/detect.tflite \
$TF_EXAMPLES/lite/examples/object_detection/android/app/src/main/assets
```
-You will also need to copy your new labelmap labelmap.txt to the assets
-directory.
-
We will now edit the gradle build file to use these assets. First, open the
`build.gradle` file
`$TF_EXAMPLES/lite/examples/object_detection/android/app/build.gradle`. Comment
@@ -122,23 +161,12 @@ out the model download script to avoid your assets being overwritten:
// apply from:'download_model.gradle'
```
-If your model is named `detect.tflite`, and your labels file `labelmap.txt`, the
-example will use them automatically as long as they've been properly copied into
-the base assets directory. If you need to use a custom path or filename, open up
-the
+If your model is named `detect.tflite`, the example will use it automatically as
+long as they've been properly copied into the base assets directory. If you need
+to use a custom path or filename, open up the
$TF_EXAMPLES/lite/examples/object_detection/android/app/src/main/java/org/tensorflow/demo/DetectorActivity.java
-file in a text editor and find the definition of TF_OD_API_LABELS_FILE. Update
-this path to point to your new label map file: "labels_list.txt". Note that if
-your model is quantized, the flag TF_OD_API_IS_QUANTIZED is set to true, and if
-your model is floating point, the flag TF_OD_API_IS_QUANTIZED is set to false.
-This new section of DetectorActivity.java should now look as follows for a
-quantized model:
-
-```java
- private static final boolean TF_OD_API_IS_QUANTIZED = true;
- private static final String TF_OD_API_MODEL_FILE = "detect.tflite";
- private static final String TF_OD_API_LABELS_FILE = "labels_list.txt";
-```
+file in a text editor and find the definition of TF_OD_API_MODEL_FILE. Update
+this path to point to your new model file.
Once you’ve copied the TensorFlow Lite model and edited the gradle build script
to not use the downloaded assets, you can build and deploy the app using the
diff --git a/research/object_detection/inputs.py b/research/object_detection/inputs.py
index bdb219b08cc..e944a7f5e11 100644
--- a/research/object_detection/inputs.py
+++ b/research/object_detection/inputs.py
@@ -479,6 +479,7 @@ def pad_input_data_to_static_shapes(tensor_dict,
input_fields.groundtruth_instance_masks: [
max_num_boxes, height, width
],
+ input_fields.groundtruth_instance_mask_weights: [max_num_boxes],
input_fields.groundtruth_is_crowd: [max_num_boxes],
input_fields.groundtruth_group_of: [max_num_boxes],
input_fields.groundtruth_area: [max_num_boxes],
@@ -601,6 +602,8 @@ def augment_input_data(tensor_dict, data_augmentation_options):
include_instance_masks = (fields.InputDataFields.groundtruth_instance_masks
in tensor_dict)
+ include_instance_mask_weights = (
+ fields.InputDataFields.groundtruth_instance_mask_weights in tensor_dict)
include_keypoints = (fields.InputDataFields.groundtruth_keypoints
in tensor_dict)
include_keypoint_visibilities = (
@@ -624,6 +627,7 @@ def augment_input_data(tensor_dict, data_augmentation_options):
include_label_confidences=include_label_confidences,
include_multiclass_scores=include_multiclass_scores,
include_instance_masks=include_instance_masks,
+ include_instance_mask_weights=include_instance_mask_weights,
include_keypoints=include_keypoints,
include_keypoint_visibilities=include_keypoint_visibilities,
include_dense_pose=include_dense_pose,
@@ -652,6 +656,7 @@ def _get_labels_dict(input_dict):
fields.InputDataFields.groundtruth_keypoint_depths,
fields.InputDataFields.groundtruth_keypoint_depth_weights,
fields.InputDataFields.groundtruth_instance_masks,
+ fields.InputDataFields.groundtruth_instance_mask_weights,
fields.InputDataFields.groundtruth_area,
fields.InputDataFields.groundtruth_is_crowd,
fields.InputDataFields.groundtruth_group_of,
@@ -804,6 +809,9 @@ def train_input(train_config, train_input_config,
labels[fields.InputDataFields.groundtruth_instance_masks] is a
[batch_size, num_boxes, H, W] float32 tensor containing only binary
values, which represent instance masks for objects.
+ labels[fields.InputDataFields.groundtruth_instance_mask_weights] is a
+ [batch_size, num_boxes] float32 tensor containing groundtruth weights
+ for each instance mask.
labels[fields.InputDataFields.groundtruth_keypoints] is a
[batch_size, num_boxes, num_keypoints, 2] float32 tensor containing
keypoints for each box.
@@ -961,6 +969,9 @@ def eval_input(eval_config, eval_input_config, model_config,
labels[fields.InputDataFields.groundtruth_instance_masks] is a
[1, num_boxes, H, W] float32 tensor containing only binary values,
which represent instance masks for objects.
+ labels[fields.InputDataFields.groundtruth_instance_mask_weights] is a
+ [1, num_boxes] float32 tensor containing groundtruth weights for each
+ instance mask.
labels[fields.InputDataFields.groundtruth_weights] is a
[batch_size, num_boxes, num_keypoints] float32 tensor containing
groundtruth weights for the keypoints.
diff --git a/research/object_detection/inputs_test.py b/research/object_detection/inputs_test.py
index 4716882e9a3..ea69717a478 100644
--- a/research/object_detection/inputs_test.py
+++ b/research/object_detection/inputs_test.py
@@ -795,15 +795,20 @@ def graph_fn():
fields.InputDataFields.image:
tf.constant(np.random.rand(10, 10, 3).astype(np.float32)),
fields.InputDataFields.groundtruth_instance_masks:
- tf.constant(np.zeros([2, 10, 10], np.uint8))
+ tf.constant(np.zeros([2, 10, 10], np.uint8)),
+ fields.InputDataFields.groundtruth_instance_mask_weights:
+ tf.constant([1.0, 0.0], np.float32)
}
augmented_tensor_dict = data_augmentation_fn(tensor_dict=tensor_dict)
return (augmented_tensor_dict[fields.InputDataFields.image],
augmented_tensor_dict[fields.InputDataFields.
- groundtruth_instance_masks])
- image, masks = self.execute_cpu(graph_fn, [])
+ groundtruth_instance_masks],
+ augmented_tensor_dict[fields.InputDataFields.
+ groundtruth_instance_mask_weights])
+ image, masks, mask_weights = self.execute_cpu(graph_fn, [])
self.assertAllEqual(image.shape, [20, 20, 3])
self.assertAllEqual(masks.shape, [2, 20, 20])
+ self.assertAllClose(mask_weights, [1.0, 0.0])
def test_include_keypoints_in_data_augmentation(self):
data_augmentation_options = [
diff --git a/research/object_detection/meta_architectures/center_net_meta_arch.py b/research/object_detection/meta_architectures/center_net_meta_arch.py
index e9e84e39644..a523a559b3d 100644
--- a/research/object_detection/meta_architectures/center_net_meta_arch.py
+++ b/research/object_detection/meta_architectures/center_net_meta_arch.py
@@ -1668,7 +1668,9 @@ def predicted_embeddings_at_object_centers(embedding_predictions,
class ObjectDetectionParams(
collections.namedtuple('ObjectDetectionParams', [
'localization_loss', 'scale_loss_weight', 'offset_loss_weight',
- 'task_loss_weight'
+ 'task_loss_weight', 'scale_head_num_filters',
+ 'scale_head_kernel_sizes', 'offset_head_num_filters',
+ 'offset_head_kernel_sizes'
])):
"""Namedtuple to host object detection related parameters.
@@ -1684,7 +1686,11 @@ def __new__(cls,
localization_loss,
scale_loss_weight,
offset_loss_weight,
- task_loss_weight=1.0):
+ task_loss_weight=1.0,
+ scale_head_num_filters=(256),
+ scale_head_kernel_sizes=(3),
+ offset_head_num_filters=(256),
+ offset_head_kernel_sizes=(3)):
"""Constructor with default values for ObjectDetectionParams.
Args:
@@ -1697,13 +1703,23 @@ def __new__(cls,
depending on the input size.
offset_loss_weight: float, The weight for localizing center offsets.
task_loss_weight: float, the weight of the object detection loss.
+ scale_head_num_filters: filter numbers of the convolutional layers used
+ by the object detection box scale prediction head.
+ scale_head_kernel_sizes: kernel size of the convolutional layers used
+ by the object detection box scale prediction head.
+ offset_head_num_filters: filter numbers of the convolutional layers used
+ by the object detection box offset prediction head.
+ offset_head_kernel_sizes: kernel size of the convolutional layers used
+ by the object detection box offset prediction head.
Returns:
An initialized ObjectDetectionParams namedtuple.
"""
return super(ObjectDetectionParams,
cls).__new__(cls, localization_loss, scale_loss_weight,
- offset_loss_weight, task_loss_weight)
+ offset_loss_weight, task_loss_weight,
+ scale_head_num_filters, scale_head_kernel_sizes,
+ offset_head_num_filters, offset_head_kernel_sizes)
class KeypointEstimationParams(
@@ -1937,7 +1953,8 @@ def __new__(cls,
class MaskParams(
collections.namedtuple('MaskParams', [
'classification_loss', 'task_loss_weight', 'mask_height', 'mask_width',
- 'score_threshold', 'heatmap_bias_init'
+ 'score_threshold', 'heatmap_bias_init', 'mask_head_num_filters',
+ 'mask_head_kernel_sizes'
])):
"""Namedtuple to store mask prediction related parameters."""
@@ -1949,7 +1966,9 @@ def __new__(cls,
mask_height=256,
mask_width=256,
score_threshold=0.5,
- heatmap_bias_init=-2.19):
+ heatmap_bias_init=-2.19,
+ mask_head_num_filters=(256),
+ mask_head_kernel_sizes=(3)):
"""Constructor with default values for MaskParams.
Args:
@@ -1963,6 +1982,10 @@ def __new__(cls,
heatmap_bias_init: float, the initial value of bias in the convolutional
kernel of the semantic segmentation prediction head. If set to None, the
bias is initialized with zeros.
+ mask_head_num_filters: filter numbers of the convolutional layers used
+ by the mask prediction head.
+ mask_head_kernel_sizes: kernel size of the convolutional layers used
+ by the mask prediction head.
Returns:
An initialized MaskParams namedtuple.
@@ -1970,7 +1993,8 @@ def __new__(cls,
return super(MaskParams,
cls).__new__(cls, classification_loss,
task_loss_weight, mask_height, mask_width,
- score_threshold, heatmap_bias_init)
+ score_threshold, heatmap_bias_init,
+ mask_head_num_filters, mask_head_kernel_sizes)
class DensePoseParams(
@@ -2312,10 +2336,18 @@ def _construct_prediction_heads(self, num_classes, num_feature_outputs,
if self._od_params is not None:
prediction_heads[BOX_SCALE] = self._make_prediction_net_list(
- num_feature_outputs, NUM_SIZE_CHANNELS, name='box_scale',
+ num_feature_outputs,
+ NUM_SIZE_CHANNELS,
+ kernel_sizes=self._od_params.scale_head_kernel_sizes,
+ num_filters=self._od_params.scale_head_num_filters,
+ name='box_scale',
unit_height_conv=unit_height_conv)
prediction_heads[BOX_OFFSET] = self._make_prediction_net_list(
- num_feature_outputs, NUM_OFFSET_CHANNELS, name='box_offset',
+ num_feature_outputs,
+ NUM_OFFSET_CHANNELS,
+ kernel_sizes=self._od_params.offset_head_kernel_sizes,
+ num_filters=self._od_params.offset_head_num_filters,
+ name='box_offset',
unit_height_conv=unit_height_conv)
if self._kp_params_dict is not None:
@@ -2370,6 +2402,8 @@ def _construct_prediction_heads(self, num_classes, num_feature_outputs,
prediction_heads[SEGMENTATION_HEATMAP] = self._make_prediction_net_list(
num_feature_outputs,
num_classes,
+ kernel_sizes=self._mask_params.mask_head_kernel_sizes,
+ num_filters=self._mask_params.mask_head_num_filters,
bias_fill=self._mask_params.heatmap_bias_init,
name='seg_heatmap',
unit_height_conv=unit_height_conv)
@@ -2721,8 +2755,7 @@ def _compute_kp_heatmap_loss(self, input_height, input_width, task_name,
gt_weights_list=gt_weights_list,
gt_classes_list=gt_classes_list,
gt_boxes_list=gt_boxes_list)
- flattened_valid_mask = _flatten_spatial_dimensions(
- tf.expand_dims(valid_mask_batch, axis=-1))
+ flattened_valid_mask = _flatten_spatial_dimensions(valid_mask_batch)
flattened_heapmap_targets = _flatten_spatial_dimensions(keypoint_heatmap)
# Sum over the number of instances per keypoint types to get the total
# number of keypoints. Note that this is used to normalized the loss and we
@@ -2945,20 +2978,32 @@ def _compute_mask_loss(self, segmentation_predictions,
Returns:
A float scalar tensor representing the mask loss.
"""
+ gt_boxes_list = self.groundtruth_lists(fields.BoxListFields.boxes)
gt_masks_list = self.groundtruth_lists(fields.BoxListFields.masks)
+ gt_mask_weights_list = None
+ if self.groundtruth_has_field(fields.BoxListFields.mask_weights):
+ gt_mask_weights_list = self.groundtruth_lists(
+ fields.BoxListFields.mask_weights)
gt_classes_list = self.groundtruth_lists(fields.BoxListFields.classes)
# Convert the groundtruth to targets.
assigner = self._target_assigner_dict[SEGMENTATION_TASK]
- heatmap_targets = assigner.assign_segmentation_targets(
+ heatmap_targets, heatmap_weight = assigner.assign_segmentation_targets(
gt_masks_list=gt_masks_list,
- gt_classes_list=gt_classes_list)
+ gt_classes_list=gt_classes_list,
+ gt_boxes_list=gt_boxes_list,
+ gt_mask_weights_list=gt_mask_weights_list)
flattened_heatmap_targets = _flatten_spatial_dimensions(heatmap_targets)
+ flattened_heatmap_mask = _flatten_spatial_dimensions(
+ heatmap_weight[:, :, :, tf.newaxis])
+ per_pixel_weights *= flattened_heatmap_mask
loss = 0.0
mask_loss_fn = self._mask_params.classification_loss
- total_pixels_in_loss = tf.reduce_sum(per_pixel_weights)
+
+ total_pixels_in_loss = tf.math.maximum(
+ tf.reduce_sum(per_pixel_weights), 1)
# Loop through each feature output head.
for pred in segmentation_predictions:
diff --git a/research/object_detection/meta_architectures/center_net_meta_arch_tf2_test.py b/research/object_detection/meta_architectures/center_net_meta_arch_tf2_test.py
index 6880f51984f..c88790a720d 100644
--- a/research/object_detection/meta_architectures/center_net_meta_arch_tf2_test.py
+++ b/research/object_detection/meta_architectures/center_net_meta_arch_tf2_test.py
@@ -1539,7 +1539,9 @@ def get_fake_mask_params():
classification_loss=losses.WeightedSoftmaxClassificationLoss(),
task_loss_weight=1.0,
mask_height=4,
- mask_width=4)
+ mask_width=4,
+ mask_head_num_filters=[96],
+ mask_head_kernel_sizes=[3])
def get_fake_densepose_params():
diff --git a/research/object_detection/model_lib.py b/research/object_detection/model_lib.py
index 111be9cb4a7..1a92c469f4c 100644
--- a/research/object_detection/model_lib.py
+++ b/research/object_detection/model_lib.py
@@ -266,6 +266,7 @@ def unstack_batch(tensor_dict, unpad_groundtruth_tensors=True):
# dimension. This list has to be kept in sync with InputDataFields in
# standard_fields.py.
fields.InputDataFields.groundtruth_instance_masks,
+ fields.InputDataFields.groundtruth_instance_mask_weights,
fields.InputDataFields.groundtruth_classes,
fields.InputDataFields.groundtruth_boxes,
fields.InputDataFields.groundtruth_keypoints,
@@ -319,6 +320,10 @@ def provide_groundtruth(model, labels):
if fields.InputDataFields.groundtruth_instance_masks in labels:
gt_masks_list = labels[
fields.InputDataFields.groundtruth_instance_masks]
+ gt_mask_weights_list = None
+ if fields.InputDataFields.groundtruth_instance_mask_weights in labels:
+ gt_mask_weights_list = labels[
+ fields.InputDataFields.groundtruth_instance_mask_weights]
gt_keypoints_list = None
if fields.InputDataFields.groundtruth_keypoints in labels:
gt_keypoints_list = labels[fields.InputDataFields.groundtruth_keypoints]
@@ -383,6 +388,7 @@ def provide_groundtruth(model, labels):
groundtruth_confidences_list=gt_confidences_list,
groundtruth_labeled_classes=gt_labeled_classes,
groundtruth_masks_list=gt_masks_list,
+ groundtruth_mask_weights_list=gt_mask_weights_list,
groundtruth_keypoints_list=gt_keypoints_list,
groundtruth_keypoint_visibilities_list=gt_keypoint_visibilities_list,
groundtruth_dp_num_points_list=gt_dp_num_points_list,
diff --git a/research/object_detection/model_lib_v2.py b/research/object_detection/model_lib_v2.py
index 45d600da779..798c52532e9 100644
--- a/research/object_detection/model_lib_v2.py
+++ b/research/object_detection/model_lib_v2.py
@@ -20,11 +20,11 @@
import copy
import os
+import pprint
import time
-import numpy as np
+import numpy as np
import tensorflow.compat.v1 as tf
-import tensorflow.compat.v2 as tf2
from object_detection import eval_util
from object_detection import inputs
@@ -87,6 +87,8 @@ def _compute_losses_and_predictions_dicts(
labels[fields.InputDataFields.groundtruth_instance_masks] is a
float32 tensor containing only binary values, which represent
instance masks for objects.
+ labels[fields.InputDataFields.groundtruth_instance_mask_weights] is a
+ float32 tensor containing weights for the instance masks.
labels[fields.InputDataFields.groundtruth_keypoints] is a
float32 tensor containing keypoints for each box.
labels[fields.InputDataFields.groundtruth_dp_num_points] is an int32
@@ -181,6 +183,22 @@ def _dummy_computation_fn(features, labels):
))
+def normalize_dict(values_dict, num_replicas):
+
+ num_replicas = tf.constant(num_replicas, dtype=tf.float32)
+ return {key: tf.math.divide(loss, num_replicas) for key, loss
+ in values_dict.items()}
+
+
+def reduce_dict(strategy, reduction_dict, reduction_op):
+ # TODO(anjalisridhar): explore if it is safe to remove the # num_replicas
+ # scaling of the loss and switch this to a ReduceOp.Mean
+ return {
+ name: strategy.reduce(reduction_op, loss, axis=None)
+ for name, loss in reduction_dict.items()
+ }
+
+
# TODO(kaftan): Explore removing learning_rate from this method & returning
## The full losses dict instead of just total_loss, then doing all summaries
## saving in a utility method called by the outer training loop.
@@ -190,10 +208,8 @@ def eager_train_step(detection_model,
labels,
unpad_groundtruth_tensors,
optimizer,
- learning_rate,
add_regularization_loss=True,
clip_gradients_value=None,
- global_step=None,
num_replicas=1.0):
"""Process a single training batch.
@@ -237,6 +253,9 @@ def eager_train_step(detection_model,
labels[fields.InputDataFields.groundtruth_instance_masks] is a
[batch_size, num_boxes, H, W] float32 tensor containing only binary
values, which represent instance masks for objects.
+ labels[fields.InputDataFields.groundtruth_instance_mask_weights] is a
+ [batch_size, num_boxes] float32 tensor containing weights for the
+ instance masks.
labels[fields.InputDataFields.groundtruth_keypoints] is a
[batch_size, num_boxes, num_keypoints, 2] float32 tensor containing
keypoints for each box.
@@ -261,16 +280,10 @@ def eager_train_step(detection_model,
float32 tensor containing the weights of the keypoint depth feature.
unpad_groundtruth_tensors: A parameter passed to unstack_batch.
optimizer: The training optimizer that will update the variables.
- learning_rate: The learning rate tensor for the current training step.
- This is used only for TensorBoard logging purposes, it does not affect
- model training.
add_regularization_loss: Whether or not to include the model's
regularization loss in the losses dictionary.
clip_gradients_value: If this is present, clip the gradients global norm
at this value using `tf.clip_by_global_norm`.
- global_step: The current training step. Used for TensorBoard logging
- purposes. This step is not updated by this function and must be
- incremented separately.
num_replicas: The number of replicas in the current distribution strategy.
This is used to scale the total loss so that training in a distribution
strategy works correctly.
@@ -291,31 +304,18 @@ def eager_train_step(detection_model,
losses_dict, _ = _compute_losses_and_predictions_dicts(
detection_model, features, labels, add_regularization_loss)
- total_loss = losses_dict['Loss/total_loss']
-
- # Normalize loss for num replicas
- total_loss = tf.math.divide(total_loss,
- tf.constant(num_replicas, dtype=tf.float32))
- losses_dict['Loss/normalized_total_loss'] = total_loss
-
- for loss_type in losses_dict:
- tf.compat.v2.summary.scalar(
- loss_type, losses_dict[loss_type], step=global_step)
+ losses_dict = normalize_dict(losses_dict, num_replicas)
trainable_variables = detection_model.trainable_variables
+ total_loss = losses_dict['Loss/total_loss']
gradients = tape.gradient(total_loss, trainable_variables)
if clip_gradients_value:
gradients, _ = tf.clip_by_global_norm(gradients, clip_gradients_value)
optimizer.apply_gradients(zip(gradients, trainable_variables))
- tf.compat.v2.summary.scalar('learning_rate', learning_rate, step=global_step)
- tf.compat.v2.summary.image(
- name='train_input_images',
- step=global_step,
- data=features[fields.InputDataFields.image],
- max_outputs=3)
- return total_loss
+
+ return losses_dict
def validate_tf_v2_checkpoint_restore_map(checkpoint_restore_map):
@@ -397,7 +397,8 @@ def load_fine_tune_checkpoint(model, checkpoint_path, checkpoint_type,
fine_tune_checkpoint_type=checkpoint_type)
validate_tf_v2_checkpoint_restore_map(restore_from_objects_dict)
ckpt = tf.train.Checkpoint(**restore_from_objects_dict)
- ckpt.restore(checkpoint_path).assert_existing_objects_matched()
+ ckpt.restore(
+ checkpoint_path).expect_partial().assert_existing_objects_matched()
def get_filepath(strategy, filepath):
@@ -474,7 +475,12 @@ def train_loop(
Checkpoint every n training steps.
checkpoint_max_to_keep:
int, the number of most recent checkpoints to keep in the model directory.
- record_summaries: Boolean, whether or not to record summaries.
+ record_summaries: Boolean, whether or not to record summaries defined by
+ the model or the training pipeline. This does not impact the summaries
+ of the loss values which are always recorded. Examples of summaries
+ that are controlled by this flag include:
+ - Image summaries of training images.
+ - Intermediate tensors which maybe logged by meta architectures.
performance_summary_exporter: function for exporting performance metrics.
num_steps_per_iteration: int, The number of training steps to perform
in each iteration.
@@ -533,7 +539,8 @@ def train_loop(
strategy = tf.compat.v2.distribute.get_strategy()
with strategy.scope():
detection_model = MODEL_BUILD_UTIL_MAP['detection_model_fn_base'](
- model_config=model_config, is_training=True)
+ model_config=model_config, is_training=True,
+ add_summaries=record_summaries)
def train_dataset_fn(input_context):
"""Callable to create train input."""
@@ -576,11 +583,9 @@ def train_dataset_fn(input_context):
# is the chief.
summary_writer_filepath = get_filepath(strategy,
os.path.join(model_dir, 'train'))
- if record_summaries:
- summary_writer = tf.compat.v2.summary.create_file_writer(
- summary_writer_filepath)
- else:
- summary_writer = tf2.summary.create_noop_writer()
+
+ summary_writer = tf.compat.v2.summary.create_file_writer(
+ summary_writer_filepath)
with summary_writer.as_default():
with strategy.scope():
@@ -614,32 +619,37 @@ def train_dataset_fn(input_context):
def train_step_fn(features, labels):
"""Single train step."""
- loss = eager_train_step(
+
+ if record_summaries:
+ tf.compat.v2.summary.image(
+ name='train_input_images',
+ step=global_step,
+ data=features[fields.InputDataFields.image],
+ max_outputs=3)
+ losses_dict = eager_train_step(
detection_model,
features,
labels,
unpad_groundtruth_tensors,
optimizer,
- learning_rate=learning_rate_fn(),
add_regularization_loss=add_regularization_loss,
clip_gradients_value=clip_gradients_value,
- global_step=global_step,
num_replicas=strategy.num_replicas_in_sync)
global_step.assign_add(1)
- return loss
+ return losses_dict
def _sample_and_train(strategy, train_step_fn, data_iterator):
features, labels = data_iterator.next()
if hasattr(tf.distribute.Strategy, 'run'):
- per_replica_losses = strategy.run(
+ per_replica_losses_dict = strategy.run(
train_step_fn, args=(features, labels))
else:
- per_replica_losses = strategy.experimental_run_v2(
- train_step_fn, args=(features, labels))
- # TODO(anjalisridhar): explore if it is safe to remove the
- ## num_replicas scaling of the loss and switch this to a ReduceOp.Mean
- return strategy.reduce(tf.distribute.ReduceOp.SUM,
- per_replica_losses, axis=None)
+ per_replica_losses_dict = (
+ strategy.experimental_run_v2(
+ train_step_fn, args=(features, labels)))
+
+ return reduce_dict(
+ strategy, per_replica_losses_dict, tf.distribute.ReduceOp.SUM)
@tf.function
def _dist_train_step(data_iterator):
@@ -665,7 +675,7 @@ def _dist_train_step(data_iterator):
for _ in range(global_step.value(), train_steps,
num_steps_per_iteration):
- loss = _dist_train_step(train_input_iter)
+ losses_dict = _dist_train_step(train_input_iter)
time_taken = time.time() - last_step_time
last_step_time = time.time()
@@ -676,11 +686,19 @@ def _dist_train_step(data_iterator):
steps_per_sec_list.append(steps_per_sec)
+ logged_dict = losses_dict.copy()
+ logged_dict['learning_rate'] = learning_rate_fn()
+
+ for key, val in logged_dict.items():
+ tf.compat.v2.summary.scalar(key, val, step=global_step)
+
if global_step.value() - logged_step >= 100:
+ logged_dict_np = {name: value.numpy() for name, value in
+ logged_dict.items()}
tf.logging.info(
- 'Step {} per-step time {:.3f}s loss={:.3f}'.format(
- global_step.value(), time_taken / num_steps_per_iteration,
- loss))
+ 'Step {} per-step time {:.3f}s'.format(
+ global_step.value(), time_taken / num_steps_per_iteration))
+ tf.logging.info(pprint.pformat(logged_dict_np, width=40))
logged_step = global_step.value()
if ((int(global_step.value()) - checkpointed_step) >=
@@ -699,7 +717,7 @@ def _dist_train_step(data_iterator):
'steps_per_sec': np.mean(steps_per_sec_list),
'steps_per_sec_p50': np.median(steps_per_sec_list),
'steps_per_sec_max': max(steps_per_sec_list),
- 'last_batch_loss': float(loss)
+ 'last_batch_loss': float(losses_dict['Loss/total_loss'])
}
mixed_precision = 'bf16' if kwargs['use_bfloat16'] else 'fp32'
performance_summary_exporter(metrics, mixed_precision)
diff --git a/research/object_detection/model_main_tf2.py b/research/object_detection/model_main_tf2.py
index 0cf053039ec..a97bd5901e0 100644
--- a/research/object_detection/model_main_tf2.py
+++ b/research/object_detection/model_main_tf2.py
@@ -65,8 +65,10 @@
flags.DEFINE_integer(
'checkpoint_every_n', 1000, 'Integer defining how often we checkpoint.')
flags.DEFINE_boolean('record_summaries', True,
- ('Whether or not to record summaries during'
- ' training.'))
+ ('Whether or not to record summaries defined by the model'
+ ' or the training pipeline. This does not impact the'
+ ' summaries of the loss values which are always'
+ ' recorded.'))
FLAGS = flags.FLAGS
diff --git a/research/object_detection/models/keras_models/resnet_v1.py b/research/object_detection/models/keras_models/resnet_v1.py
index 62660d4a70d..f57b8bd3468 100644
--- a/research/object_detection/models/keras_models/resnet_v1.py
+++ b/research/object_detection/models/keras_models/resnet_v1.py
@@ -19,9 +19,10 @@
from __future__ import division
from __future__ import print_function
+from keras.applications import resnet
+
import tensorflow.compat.v1 as tf
-from tensorflow.python.keras.applications import resnet
from object_detection.core import freezable_batch_norm
from object_detection.models.keras_models import model_utils
diff --git a/research/object_detection/protos/center_net.proto b/research/object_detection/protos/center_net.proto
index 9e58bf1ad93..fd138e42ce7 100644
--- a/research/object_detection/protos/center_net.proto
+++ b/research/object_detection/protos/center_net.proto
@@ -65,6 +65,14 @@ message CenterNet {
// Localization loss configuration for object scale and offset losses.
optional LocalizationLoss localization_loss = 8;
+
+ // Parameters to determine the architecture of the object scale prediction
+ // head.
+ optional PredictionHeadParams scale_head_params = 9;
+
+ // Parameters to determine the architecture of the object offset prediction
+ // head.
+ optional PredictionHeadParams offset_head_params = 10;
}
optional ObjectDetection object_detection_task = 4;
@@ -268,6 +276,10 @@ message CenterNet {
// prediction head. -2.19 corresponds to predicting foreground with
// a probability of 0.1.
optional float heatmap_bias_init = 3 [default = -2.19];
+
+ // Parameters to determine the architecture of the segmentation mask
+ // prediction head.
+ optional PredictionHeadParams mask_head_params = 7;
}
optional MaskEstimation mask_estimation_task = 8;
diff --git a/research/object_detection/utils/spatial_transform_ops.py b/research/object_detection/utils/spatial_transform_ops.py
index 1880dffea1a..26122dbccb1 100644
--- a/research/object_detection/utils/spatial_transform_ops.py
+++ b/research/object_detection/utils/spatial_transform_ops.py
@@ -19,6 +19,7 @@
from __future__ import print_function
import tensorflow.compat.v1 as tf
+from object_detection.utils import shape_utils
def _coordinate_vector_1d(start, end, size, align_endpoints):
@@ -322,7 +323,7 @@ def multilevel_roi_align(features, boxes, box_levels, output_size,
"""
with tf.name_scope(scope, 'MultiLevelRoIAlign'):
features, true_feature_shapes = pad_to_max_size(features)
- batch_size = tf.shape(features)[0]
+ batch_size = shape_utils.combined_static_and_dynamic_shape(features)[0]
num_levels = features.get_shape().as_list()[1]
max_feature_height = tf.shape(features)[2]
max_feature_width = tf.shape(features)[3]
diff --git a/research/object_detection/utils/target_assigner_utils.py b/research/object_detection/utils/target_assigner_utils.py
index 7ac61e8a84d..dd8c69b9c12 100644
--- a/research/object_detection/utils/target_assigner_utils.py
+++ b/research/object_detection/utils/target_assigner_utils.py
@@ -289,12 +289,38 @@ def get_valid_keypoint_mask_for_class(keypoint_coordinates,
return mask, keypoints_nan_to_zeros
-def blackout_pixel_weights_by_box_regions(height, width, boxes, blackout):
- """Blackout the pixel weights in the target box regions.
+def blackout_pixel_weights_by_box_regions(height, width, boxes, blackout,
+ weights=None):
+ """Apply weights at pixel locations.
This function is used to generate the pixel weight mask (usually in the output
image dimension). The mask is to ignore some regions when computing loss.
+ Weights are applied as follows:
+ - Any region outside of a box gets the default weight 1.0
+ - Any box for which an explicit weight is specifed gets that weight. If
+ multiple boxes overlap, the maximum of the weights is applied.
+ - Any box for which blackout=True is specified will get a weight of 0.0,
+ regardless of whether an equivalent non-zero weight is specified. Also, the
+ blackout region takes precedence over other boxes which may overlap with
+ non-zero weight.
+
+ Example:
+ height = 4
+ width = 4
+ boxes = [[0., 0., 2., 2.],
+ [0., 0., 4., 2.],
+ [3., 0., 4., 4.]]
+ blackout = [False, False, True]
+ weights = [4.0, 3.0, 2.0]
+ blackout_pixel_weights_by_box_regions(height, width, boxes, blackout,
+ weights)
+ >> [[4.0, 4.0, 1.0, 1.0],
+ [4.0, 4.0, 1.0, 1.0],
+ [3.0, 3.0, 1.0, 1.0],
+ [0.0, 0.0, 0.0, 0.0]]
+
+
Args:
height: int, height of the (output) image.
width: int, width of the (output) image.
@@ -302,10 +328,15 @@ def blackout_pixel_weights_by_box_regions(height, width, boxes, blackout):
coordinates of the four corners of the boxes.
blackout: A boolean tensor with shape [num_instances] indicating whether to
blackout (zero-out) the weights within the box regions.
+ weights: An optional float32 tensor with shape [num_instances] indicating
+ a value to apply in each box region. Note that if blackout=True for a
+ given box, the weight will be zero. If None, all weights are assumed to be
+ 1.
Returns:
A float tensor with shape [height, width] where all values within the
- regions of the blackout boxes are 0.0 and 1.0 else where.
+ regions of the blackout boxes are 0.0 and 1.0 (or weights if supplied)
+ elsewhere.
"""
num_instances, _ = shape_utils.combined_static_and_dynamic_shape(boxes)
# If no annotation instance is provided, return all ones (instead of
@@ -323,22 +354,36 @@ def blackout_pixel_weights_by_box_regions(height, width, boxes, blackout):
# Make the mask with all 1.0 in the box regions.
# Shape: [num_instances, height, width]
- in_boxes = tf.cast(
- tf.logical_and(
- tf.logical_and(y_grid >= y_min, y_grid <= y_max),
- tf.logical_and(x_grid >= x_min, x_grid <= x_max)),
- dtype=tf.float32)
-
- # Shape: [num_instances, height, width]
- blackout = tf.tile(
- tf.expand_dims(tf.expand_dims(blackout, axis=-1), axis=-1),
- [1, height, width])
-
- # Select only the boxes specified by blackout.
- selected_in_boxes = tf.where(blackout, in_boxes, tf.zeros_like(in_boxes))
- out_boxes = tf.reduce_max(selected_in_boxes, axis=0)
- out_boxes = tf.ones_like(out_boxes) - out_boxes
- return out_boxes
+ in_boxes = tf.math.logical_and(
+ tf.math.logical_and(y_grid >= y_min, y_grid < y_max),
+ tf.math.logical_and(x_grid >= x_min, x_grid < x_max))
+
+ if weights is None:
+ weights = tf.ones_like(blackout, dtype=tf.float32)
+
+ # Compute a [height, width] tensor with the maximum weight in each box, and
+ # 0.0 elsewhere.
+ weights_tiled = tf.tile(
+ weights[:, tf.newaxis, tf.newaxis], [1, height, width])
+ weights_3d = tf.where(in_boxes, weights_tiled,
+ tf.zeros_like(weights_tiled))
+ weights_2d = tf.math.maximum(
+ tf.math.reduce_max(weights_3d, axis=0), 0.0)
+
+ # Add 1.0 to all regions outside a box.
+ weights_2d = tf.where(
+ tf.math.reduce_any(in_boxes, axis=0),
+ weights_2d,
+ tf.ones_like(weights_2d))
+
+ # Now enforce that blackout regions all have zero weights.
+ keep_region = tf.cast(tf.math.logical_not(blackout), tf.float32)
+ keep_region_tiled = tf.tile(
+ keep_region[:, tf.newaxis, tf.newaxis], [1, height, width])
+ keep_region_3d = tf.where(in_boxes, keep_region_tiled,
+ tf.ones_like(keep_region_tiled))
+ keep_region_2d = tf.math.reduce_min(keep_region_3d, axis=0)
+ return weights_2d * keep_region_2d
def _get_yx_indices_offset_by_radius(radius):
diff --git a/research/object_detection/utils/target_assigner_utils_test.py b/research/object_detection/utils/target_assigner_utils_test.py
index ef0f3420e01..4f35a4463f5 100644
--- a/research/object_detection/utils/target_assigner_utils_test.py
+++ b/research/object_detection/utils/target_assigner_utils_test.py
@@ -196,13 +196,36 @@ def graph_fn():
return output
output = self.execute(graph_fn, [])
- # All zeros in region [0:6, 0:6].
- self.assertAlmostEqual(np.sum(output[0:6, 0:6]), 0.0)
- # All zeros in region [12:19, 6:9].
- self.assertAlmostEqual(np.sum(output[6:9, 12:19]), 0.0)
+ # All zeros in region [0:5, 0:5].
+ self.assertAlmostEqual(np.sum(output[0:5, 0:5]), 0.0)
+ # All zeros in region [12:18, 6:8].
+ self.assertAlmostEqual(np.sum(output[6:8, 12:18]), 0.0)
# All other pixel weights should be 1.0.
- # 20 * 10 - 6 * 6 - 3 * 7 = 143.0
- self.assertAlmostEqual(np.sum(output), 143.0)
+ # 20 * 10 - 5 * 5 - 2 * 6 = 163.0
+ self.assertAlmostEqual(np.sum(output), 163.0)
+
+ def test_blackout_pixel_weights_by_box_regions_with_weights(self):
+ def graph_fn():
+ boxes = tf.constant(
+ [[0.0, 0.0, 2.0, 2.0],
+ [0.0, 0.0, 4.0, 2.0],
+ [3.0, 0.0, 4.0, 4.0]],
+ dtype=tf.float32)
+ blackout = tf.constant([False, False, True], dtype=tf.bool)
+ weights = tf.constant([0.4, 0.3, 0.2], tf.float32)
+ blackout_pixel_weights_by_box_regions = tf.function(
+ ta_utils.blackout_pixel_weights_by_box_regions)
+ output = blackout_pixel_weights_by_box_regions(
+ 4, 4, boxes, blackout, weights)
+ return output
+
+ output = self.execute(graph_fn, [])
+ expected_weights = [
+ [0.4, 0.4, 1.0, 1.0],
+ [0.4, 0.4, 1.0, 1.0],
+ [0.3, 0.3, 1.0, 1.0],
+ [0.0, 0.0, 0.0, 0.0]]
+ np.testing.assert_array_almost_equal(expected_weights, output)
def test_blackout_pixel_weights_by_box_regions_zero_instance(self):
def graph_fn():